图像去雾/图像去雨(matlab/python)

图像去雾和图像去雨是计算机视觉领域的两个重要问题,旨在改善被大气条件或降雨影响而模糊或噪声化的图像质量。这两个技术在很多实际应用中具有广泛的价值,包括无人驾驶、安防监控、航空航天等领域。下面将分点介绍图像去雾和图像去雨的相关内容。
1. 图像去雾:
? ?图像去雾技术旨在消除由于大气散射引起的图像模糊和低对比度问题。大气散射是指光线在经过大气层时与空气中的微粒发生相互作用,导致图像中出现散射光。这使得图像失去了远处物体的细节和清晰度,给图像处理和分析带来了挑战。
? ?图像去雾算法通常基于图像的物理模型和统计特性来推断和恢复雾霾图像。常见的方法包括暗通道先验、频域滤波、偏微分方程等。这些方法通过估计图像中的透射率和大气光照来恢复出清晰的图像,并使其更具可视性和信息量。
2. 图像去雨:
? ?图像去雨技术旨在消除由降雨引起的图像模糊和噪声问题。下雨时,雨滴会散射和吸收光线,进一步降低图像的质量。这使得图像失去了细节和清晰度,严重影响了视觉感知和后续图像处理任务。
? ?图像去雨算法通常基于图像的统计特性和纹理信息来推断和恢复雨滴造成的噪声。常见的方法包括多尺度分析、运动估计、降噪滤波等。这些方法通过建立图像中的雨滴模型,并利用图像间的关联性进行恢复,从而改善图像的质量和可视性。
图像去雾和图像去雨是计算机视觉领域的研究热点,目前已经有许多有效的算法被提出并得到广泛应用。然而,这两个问题仍然具有一定的挑战性,尤其在复杂场景和极端天气条件下。未来的研究将致力于进一步提高算法的鲁棒性和效果,以满足实际应用的需求。
总结起来,图像去雾和图像去雨技术在改善图像质量、提高视觉感知和图像处理任务的准确性方面具有重要意义。它们的发展为众多领域带来了巨大的潜力和机会,也为计算机视觉研究者提供了广阔的研究空间。
去雨前言
从静止图像中去除雨水是一项复杂且具有挑战性的任务。雨滴仅影响图像的很小区域,因此导致确定应考虑哪个区域和不应考虑哪个区域的混乱。 其他市面算法如FFT去雨也已经实现!
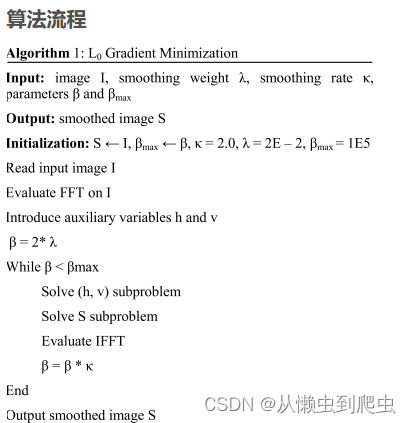
在本文中,已经实现了一种新技术,该技术有效地使用L0梯度最小化方法来去除雨像素。
最小化技术可以全局控制图像中产生多少非零梯度。该方法与局部特征无关,而是全局定位重要边缘。
保留了这些显着的边缘,并且减少了低振幅和微不足道的细节。以这种方式去除雨像素。
最后,使用直方图调整技术增强了雨水去除的图像的强度,以获得更好的对比度图像。实验结果表明,该算法在去除图像去雨方面有良好的效果。
?
去雨代码部分?
clear;
close all;
I=imread('youwutu.jpg'); %读入图像
R=I(:,:,1);% 取输入图像的R分量
[N1,M1]=size(R);
R0=double(R);% 对R分量进行数据转换,并对其取对数
Rlog=log(R0+1);
Rfft2=fft2(R0);% 对R分量进行二维傅里叶变换
sigma=250;% 形成高斯滤波函数
F = zeros(N1,M1);
for i=1:N1
for j=1:M1
F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma));
end
end
F=F./(sum(F(:)));
Ffft=fft2(double(F)); %对高斯滤波函数进行二维傅里叶变换
DR0=Rfft2.*Ffft; %对R分量与高斯滤波函数进行卷积运算
DR=ifft2(DR0);
DRdouble=double(DR); %在对数域中,用原图像减去低通滤波后的图像,得到高频增强图像
DRlog=log(DRdouble+1);
Rr=Rlog-DRlog;
G=I(:,:,2); % 取输入图像的G分量
[N1,M1]=size(G);
G0=double(G); %对G分量进行数据转换,并对其取对数
Glog = log(G0+1);
Gfft2=fft2(G0); %对G分量进行二维傅里叶变换
sigma=250;
for i=1:N1
for j=1:M1
F(i,j)=exp(-((i-N1/2)^2+(j-M1/2)^2)/(2*sigma*sigma));
end
end
F = F./(sum(F(:)));
Ffft=fft2(double(F)); %对高斯滤波函数进行二维傅里叶变换
DG0=Gfft2.*Ffft; %对高斯滤波函数进行二维傅里叶变换
DG=ifft2(DG0);
DGdouble=double(DG); %在对数域中,用原图像减去低通滤波后的图像,得到高频增强图像
DGlog=log(DGdouble+1);
Gg=Glog-DGlog;
EXPGg=exp(Gg); %取反对数,得到增强后的图像分量
MIN = min(min(EXPGg)); %对增强后的图像进行对比度拉伸增强
MAX = max(max(EXPGg));
end
end
QQ767172261
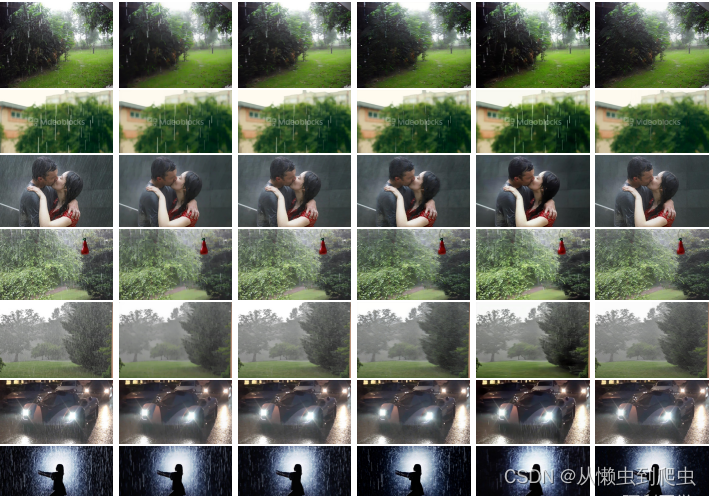
去雨结果 matlab 展示



图像去雾
去雾概述
暗通道先验:首先说在绝大多数非天空的局部区域里,某一些像素总会有至少一个颜色通道具有很低的值,也就是说该区域光强是一个很小的值。
所以给暗通道下了个数学定义,对于任何输入的图像J,其暗通道可以用下面的公式来表示:图片其中表示彩色图像每个通道,表示以像素X为中心的一个窗口。
要求暗通道的图像是比较容易的,先求出每个像素在3个通道的最小值,存到一个二维Mat中(灰度图),然后做一个最小值滤波,滤波的半径由窗口大小决定,这里窗口大小为,公式表示为,其中表示滤波半径。
图片暗通道先验理论得出的结论,这个我不知道如何证明,不过论文给出了几个原因:
a)汽车、建筑物和城市中玻璃窗户的阴影,或者是树叶、树与岩石等自然景观的投影;
b)色彩鲜艳的物体或表面,在RGB的三个通道中有些通道的值很低(比如绿色的草地/树/植物,红色或黄色的花朵/叶子,或者蓝色的水面)
去雾代码:
计算雾化图像的暗通道。
def DarkChannel(img, size=15):
"""
暗通道的计算主要分成两个步骤:
1.获取BGR三个通道的最小值
2.以一个窗口做MinFilter
ps.这里窗口大小一般为15(radius为7)
获取BGR三个通道的最小值就是遍历整个图像,取最小值即可
"""
r, g, b = cv2.split(img)
min_img = cv2.min(r, cv2.min(g, b))
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (size, size))
dc_img = cv2.erode(min_img, kernel)
return dc_img
估算全局大气光值
def GetAtmo(img, percent=0.001):
"""
1.计算有雾图像的暗通道
2.用一个Node的结构记录暗通道图像每个像素的位置和大小,放入list中
3.对list进行降序排序
4.按暗通道亮度前0.1%(用percent参数指定百分比)的位置,在原始有雾图像中查找最大光强值
"""
mean_perpix = np.mean(img, axis=2).reshape(-1)
mean_topper = mean_perpix[:int(img.shape[0] * img.shape[1] * percent)]
return np.mean(mean_topper)
估算透射率图
def GetTrans(img, atom, w):
"""
w为去雾程度,一般取0.95
w的值越小,去雾效果越不明显
"""
x = img / atom
t = 1 - w * DarkChannel(x, 15)
return t
def GuidedFilter(p, i, r, e):
"""
:param p: input image
:param i: guidance image
:param r: radius
:param e: regularization
:return: filtering output q
"""
# 1
mean_I = cv2.boxFilter(i, cv2.CV_64F, (r, r))
mean_p = cv2.boxFilter(p, cv2.CV_64F, (r, r))
corr_I = cv2.boxFilter(i * i, cv2.CV_64F, (r, r))
corr_Ip = cv2.boxFilter(i * p, cv2.CV_64F, (r, r))
# 2
var_I = corr_I - mean_I * mean_I
cov_Ip = corr_Ip - mean_I * mean_p
# 3
a = cov_Ip / (var_I + e)
b = mean_p - a * mean_I
# 4
mean_a = cv2.boxFilter(a, cv2.CV_64F, (r, r))
mean_b = cv2.boxFilter(b, cv2.CV_64F, (r, r))
# 5
q = mean_a * i + mean_b
return q
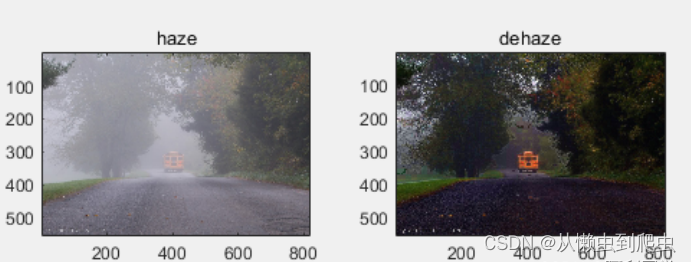
去雾结果 matlab GUI交互展示:
同样的代码也有python版本

结论
本文只是众多流程的一部分,为目标检测 和其他应用奠定举出。
通过将所提算法与经典算法进行验证对比,结果表明本文极端环境下的目标 检测与测距方法具有良好的有效性和可行性
将处理后的图像输送到目标检测和测距模型,提高了目标检测和测距精度,为自动驾驶主动安全行为决策提供必要的技术支持,使得自动驾驶汽车应用在极端环境变得可行。
若果觉得有用的话,请帮忙点赞,也可以私信交流。
?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!