CAN通信物理层容错测试-故障排查
在项目开发过程中,一般需要满足以下几种状况的测试项才算符合要求。如果新能源汽车出现故障首先使用故障诊断仪进行综合诊断,看有无故障代码,然后根据提示或经验,安全规范的检测。
CAN系统正常通讯电压的测量-两者相加为5V左右:
CAN-H: 2.5-3.5V(CAN H对地电压约为2.6V左右)
CAN-L: 1.5-2.5V(CAN L对地电压约为2.4V左右)
一、CAN_H与CAN_L短路
判定标准:短接故障发生后,ECU进入Bus off状态,一般会有相应的网络故障码,总线上会监控到错误帧,故障移除后通信恢复正常。
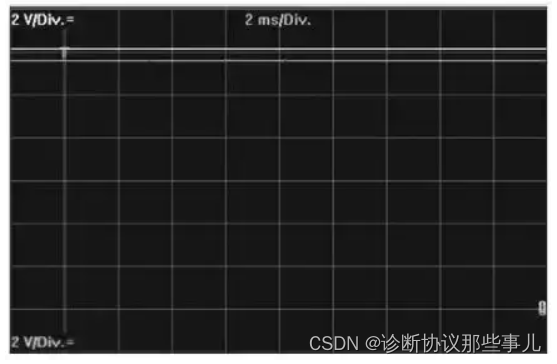
CAN H 与CAN L 短路的总线波形如下图所示:
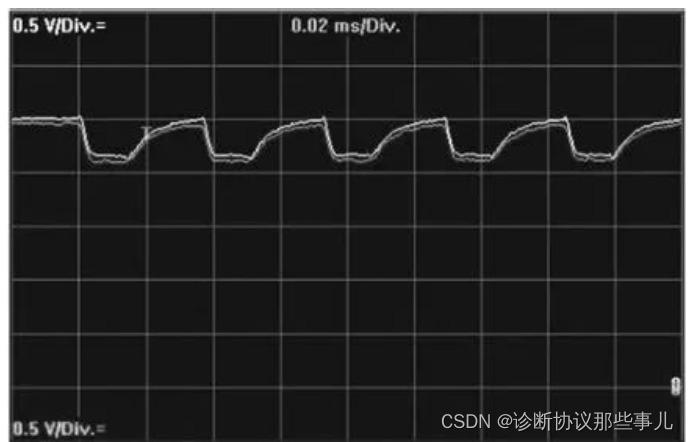
当两者相互短路之后,CAN电压电位置于隐性电压值(约2.5V)。实际测量两条CAN导线的电压,会发现始终在2.5V左右,基本不变化.
二、CAN_H与电源(正极)短路
判定标准: 短接故障发生后,ECU通信信号质量变差,但不影响正常通信(根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况),故障移除后通信恢复正常。
三、CAN_H与GND短路
判定标准: 短接故障发生后,ECU进入Bus off状态,一般会有相应的网络故障码,总线上会监控到错误帧或无任何报文同时也没有错误帧,故障移除后通信恢复正常。
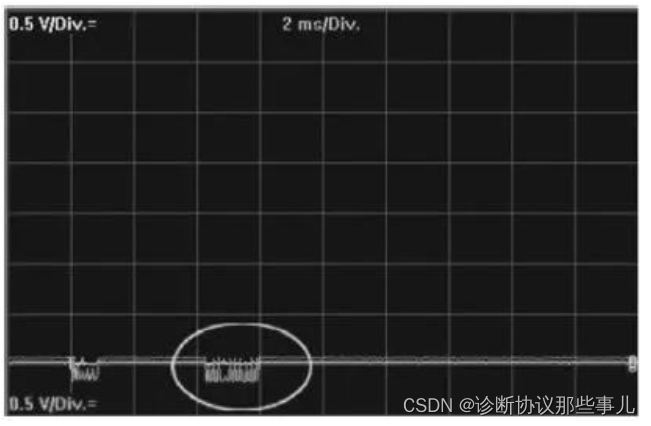
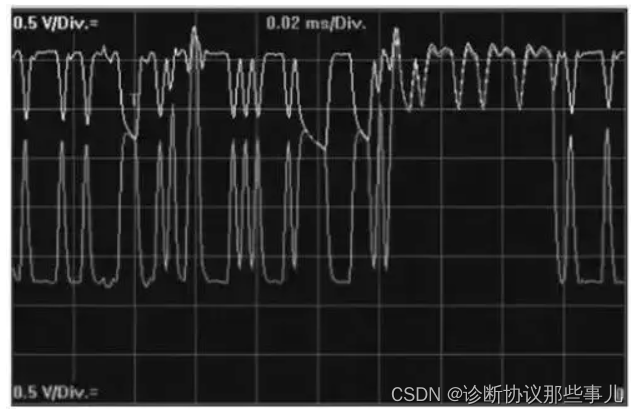
CAN H 的电压位于0V,CAN L 电压也位于0V,可是在CAN L 导线上还能够看到一小部分的电压变化。CAN H 对地短路的总线波形如下图所示。
四、CAN_L与GND短路
判定标准: 短接故障发生后,ECU通信信号质量变差,但不影响正常通信(根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况),故障移除后通信恢复正常。
五、CAN_L与电源(正极)短路
判定标准: 短接故障发生后,ECU进入Bus off状态,总线上会监控到错误帧或无任何报文同时也没有错误帧,故障移除后通信恢复正常。
六、CAN_H断路
判定标准: 故障发生后,ECU停止通信,故障移除后通信恢复正常。
七、CAN_L断路
判定标准: 故障发生后,ECU停止通信,故障移除后通信恢复正常。
八、CAN L 与CAN H 导线互相接反
当出现CAN L 与CAN H 导线互相接反这种故障时,一般情况下,接错的那个控制模块将无法通信,其他控制模块的通信则正常。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!