深入理解强化学习——马尔可夫决策过程:价值迭代-[价值迭代算法]
分类目录:《深入理解强化学习》总目录
文章《深入理解强化学习——马尔可夫决策过程:价值迭代-[最优性原理]》和文章《深入理解强化学习——马尔可夫决策过程:价值迭代-[确认性价值迭代]》介绍了价值迭代的基础知识,本文将介绍价值迭代算法。
价值迭代算法的过程如下:
价值迭代算法
( 1 ) 初始化:令 k = 1 k=1 k=1, ? s : V 0 ( s ) = 0 \forall s: V_0(s)=0 ?s:V0?(s)=0
( 2 ) for k = 1 : H k=1:H k=1:H, H H H为使 V ( s ) V(s) V(s)收敛所需的迭代次数
( 3 ) ? s : Q k + 1 ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s , a ) V k ( s ′ ) \quad\forall s:Q_{k+1}(s, a)=R(s, a)+\gamma\sum_{s'\in S}p(s'|s,a)V_k(s') ?s:Qk+1?(s,a)=R(s,a)+γ∑s′∈S?p(s′∣s,a)Vk?(s′)
( 4 ) ? s : V k + 1 ( s ) = max ? a Q k + 1 ( s , a ) \quad\forall s:V_{k+1}(s)=\max_aQ_{k+1}(s, a) ?s:Vk+1?(s)=maxa?Qk+1?(s,a)
( 5 ) k = k + 1 \quad k = k + 1 k=k+1
( 6 ) 在迭代后提取最优策略: π ( s ) = arg ? max ? a [ R ( s , a ) + γ ∑ s ∈ S p ( s ′ ∣ s , a ) V H + 1 ( s ′ ) ] \pi(s)=\arg\max_a[R(s, a)+\gamma\sum_{s\in S}p(s'|s, a)V_{H+1}(s')] π(s)=argmaxa?[R(s,a)+γ∑s∈S?p(s′∣s,a)VH+1?(s′)]
我们使用价值迭代算法是为了得到最佳的策略 π \pi π。我们可以使用文章《深入理解强化学习——马尔可夫决策过程:价值迭代-[确认性价值迭代]》中的式子进行迭代,迭代多次且收敛后得到的值就是最佳的价值。
价值迭代算法开始的时候,把所有值初始化,接着对每个状态进行迭代。 我们把 Q k + 1 ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s , a ) V k ( s ′ ) Q_{k+1}(s, a)=R(s, a)+\gamma\sum_{s'\in S}p(s'|s,a)V_k(s') Qk+1?(s,a)=R(s,a)+γ∑s′∈S?p(s′∣s,a)Vk?(s′)代入式 V k + 1 ( s ) = max ? a Q k + 1 ( s , a ) V_{k+1}(s)=\max_aQ_{k+1}(s, a) Vk+1?(s)=maxa?Qk+1?(s,a),就可以得到文章《深入理解强化学习——马尔可夫决策过程:价值迭代-[确认性价值迭代]》中的式子。因此,我们有了上两式后,就不停地迭代,迭代多次后价值函数就会收敛,收敛后就会得到 V ? V^* V?。我们有了 V ? V^* V?后,一个问题是如何进一步推算出它的最佳策略。我们可以直接用 arg ? max ? \arg\max argmax 操作来提取最佳策略。我们先重构Q函数,重构后,每一列对应的Q值最大的动作就是最佳策略。这样我们就可以从最佳价值函数里面提取出最佳策略。 我们只是在解决一个规划的问题,而不是强化学习的问题,因为我们知道环境如何变化。
价值迭代做的工作类似于价值的反向传播,每次迭代做一步传播,所以中间过程的策略和价值函数 是没有意义的。而策略迭代的每一次迭代的结果都是有意义的,都是一个完整的策略。下图所示为一个可视化的求最短路径的过程,在一个网格世界中,我们设定了一个终点,也就是左上角的点。不管我们在哪一个位置开始,我们都希望能够到达终点(实际上这个终点在迭代过程中是不必要的,只是为了更好地演示)。价值迭代的迭代过程像是一个从某一个状态(这里是我们的终点)反向传播到其他各个状态的过程,因为每次迭代只能影响到与之直接相关的状态。 让我们回忆一下最优性原理定理:如果我们某次迭代求解的某个状态
s
s
s的价值函数
V
k
+
1
(
s
)
V_{k+1}(s)
Vk+1?(s)是最优解,它的前提是能够从该状态到达的所有状态
s
‘’
s‘’
s‘’都已经得到了最优解;如果不是,它所做的只是一个类似传递价值函数的过程。
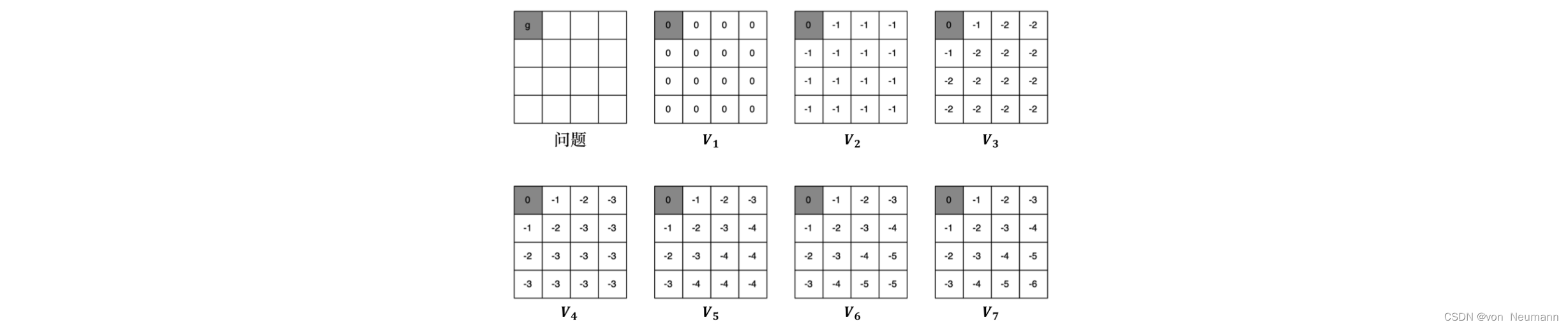
如上图所示,实际上,对于每一个状态,我们都可以将其看成一个终点。迭代由每一个终点开始,我们每次都根据贝尔曼最优方程重新计算价值。如果它的相邻节点价值发生了变化,变得更好了,那么它的价值也会变得更好,一直到相邻节点都不变。因此,在我们迭代到
V
7
V_7
V7?之前,也就是还没将每个终点的最优的价值传递给其他的所有状态之前,中间的几个价值只是一种暂存的不完整的数据,它不能代表每一个状态的价值,所以生成的策略是没有意义的策略。价值迭代是一个迭代过程,上图可视化了从
V
1
V_1
V1?到
V
7
V_7
V7?每一个状态的价值的变化。而且因为智能体每走一步就会得到一个负的价值,所以它需要尽快地到达终点,可以发现离它越远的状态,价值就越小。
V
7
V_7
V7?收敛过后,右下角的价值是
?
6
?6
?6,相当于它要走6步,才能到达终点。智能体离终点越近,价值越大。当我们得到最优价值后,我们就可以通过策略提取来得到最佳策略。
参考文献:
[1] 张伟楠, 沈键, 俞勇. 动手学强化学习[M]. 人民邮电出版社, 2022.
[2] Richard S. Sutton, Andrew G. Barto. 强化学习(第2版)[M]. 电子工业出版社, 2019
[3] Maxim Lapan. 深度强化学习实践(原书第2版)[M]. 北京华章图文信息有限公司, 2021
[4] 王琦, 杨毅远, 江季. Easy RL:强化学习教程 [M]. 人民邮电出版社, 2022
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!