控制理论simulink+matlab
2023-12-20 07:24:24
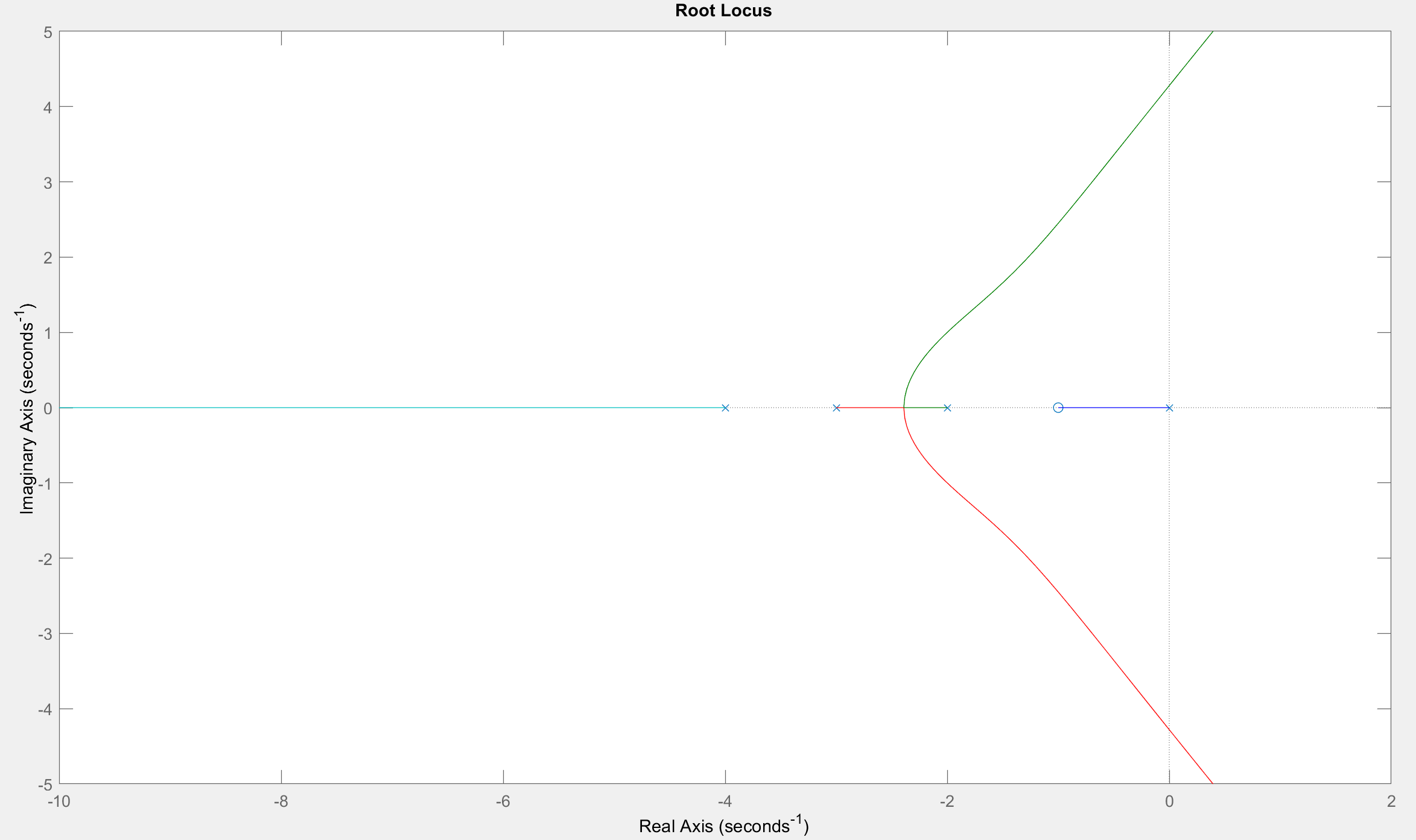
根轨迹
z = [-1]; %开环传递函数的零点
p = [0 -2 -3 -4]; %开环传递函数的系统极点
k = 1; %开环传递函数的系数,反映在比例上
g = zpk(z,p,k); %生成开环传递函数
%生成的传递函数如下
% (s+1)
% -------------------
% s (s+2) (s+3) (s+4)
rlocus(g); %生成根轨迹图
闭环传递函数的极点随着闭环传递函数转化而来的开环传递函数带的比例系数K从0->∞的轨迹
二级目录
三级目录
文章来源:https://blog.csdn.net/qq_43628162/article/details/135096941
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!