UCOSIII移植
2024-01-03 05:36:23
1、“sys.h” 头文件修改
//0,不支持ucos
//1,支持ucos
#define SYSTEM_SUPPORT_OS 1 //定义系统文件夹是否支持UCOS
2、stm32f10x_it.c中断屏蔽
注释掉void PendSV_Handler(void) 和 void SysTick_Handler(void)中断
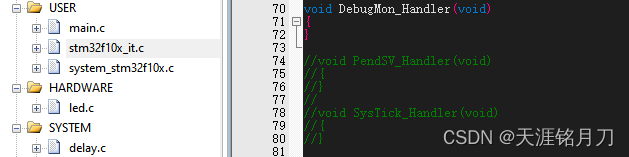
//void PendSV_Handler(void)
//{
//}
//
//void SysTick_Handler(void)
//{
//}
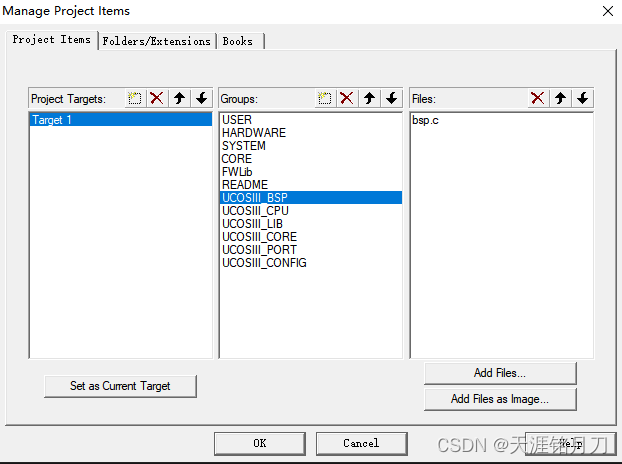
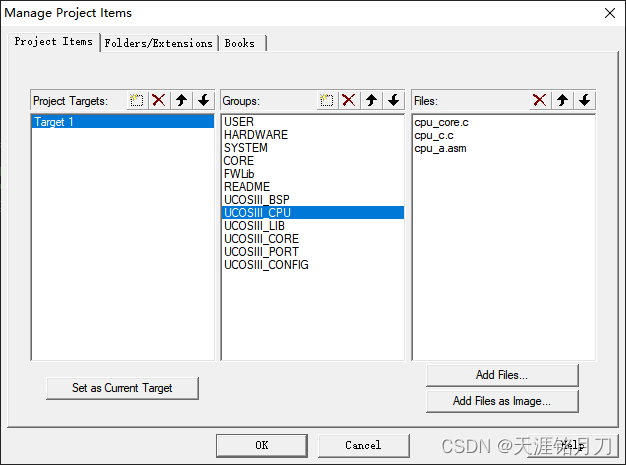
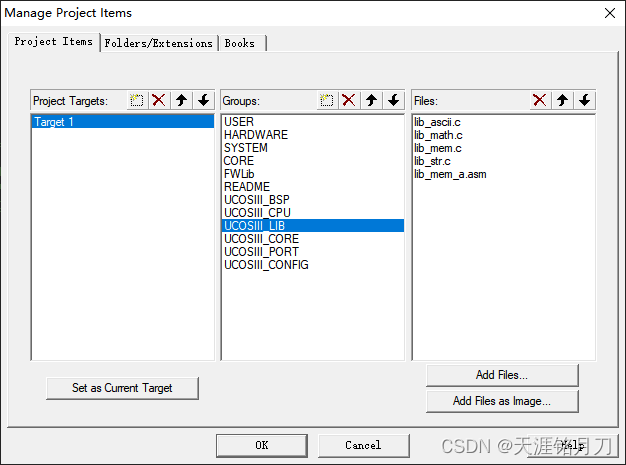
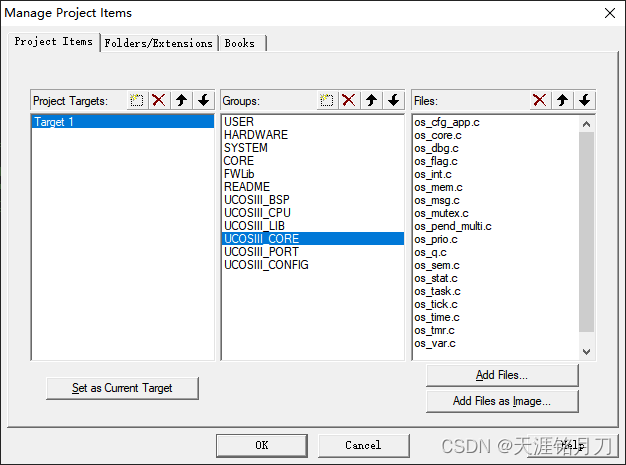
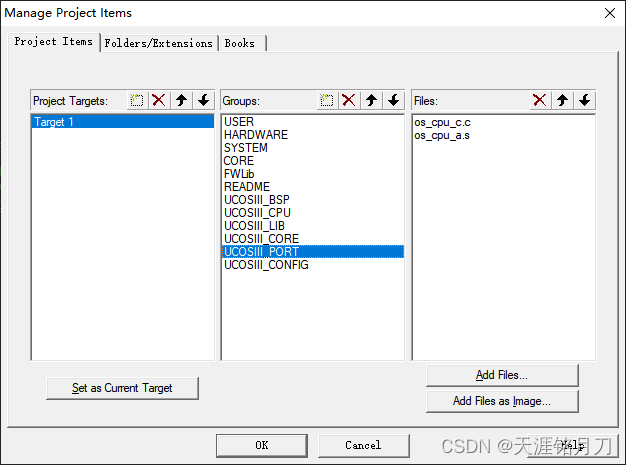
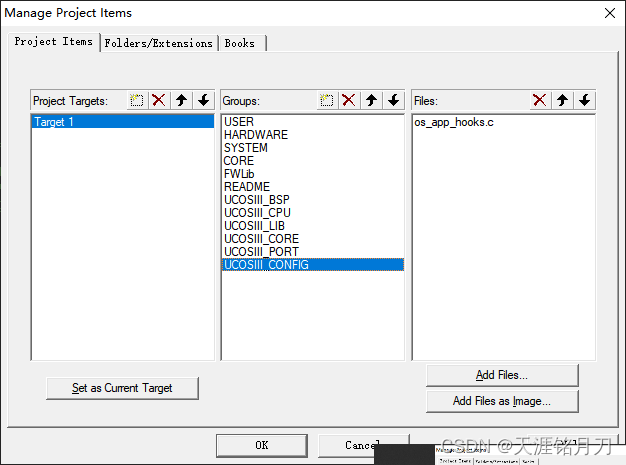
3、文件树管理,增加UCOSIII相关文件
UCOSIII_BSP
UCOSIII_CPU
UCOSIII_LIB
UCOSIII_CORE
UCOSIII_PORT
UCOSIII_CONFIG
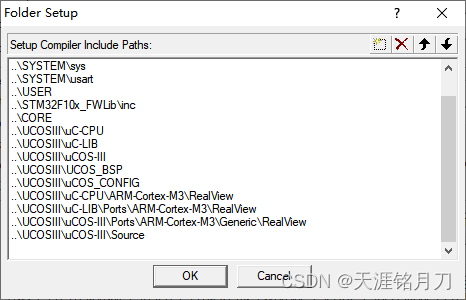
4、UCSIII中文件夹内容的位置及头文件的位置。
5、主函数的头文件增加#include “includes.h”
#include “delay.h”
#include “sys.h”
#include “usart.h”
/* 用户自定义头文件 */
#include “includes.h”
6、修改主函数“main.c”的文件结构
#include "led.h"
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "includes.h"
//任务优先级
#define START_TASK_PRIO 3
//任务堆栈大小
#define START_STK_SIZE 512
//任务控制块
OS_TCB StartTaskTCB;
//任务堆栈
CPU_STK START_TASK_STK[START_STK_SIZE];
//任务函数
void start_task(void *p_arg);
//任务优先级
#define TASK1_PRIO 4
//任务堆栈大小
#define STK1_SIZE 128
//任务控制块
OS_TCB Task1TCB;
//任务堆栈
CPU_STK TASK1_STK[STK1_SIZE];
void task1(void *p_arg);
int main(void)
{
OS_ERR err;
CPU_SR_ALLOC();
delay_init(); //延时初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断分组配置
uart_init(115200); //串口波特率设置
LED_Init(); //LED初始化
OSInit(&err); //初始化UCOSIII
OS_CRITICAL_ENTER();//进入临界区
//创建开始任务
OSTaskCreate((OS_TCB * )&StartTaskTCB, //任务控制块
(CPU_CHAR * )"start task", //任务名字
(OS_TASK_PTR )start_task, //任务函数
(void * )0, //传递给任务函数的参数
(OS_PRIO )START_TASK_PRIO, //任务优先级
(CPU_STK * )&START_TASK_STK[0], //任务堆栈基地址
(CPU_STK_SIZE)START_STK_SIZE/10, //任务堆栈深度限位
(CPU_STK_SIZE)START_STK_SIZE, //任务堆栈大小
(OS_MSG_QTY )0, //任务内部消息队列能够接收的最大消息数目,为0时禁止接收消息
(OS_TICK )0, //当使能时间片轮转时的时间片长度,为0时为默认长度,
(void * )0, //用户补充的存储区
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR, //任务选项
(OS_ERR * )&err); //存放该函数错误时的返回值
OS_CRITICAL_EXIT(); //退出临界区
OSStart(&err); //开启UCOSIII
while(1);
}
//开始任务函数
void start_task(void *p_arg)
{
OS_ERR err;
CPU_SR_ALLOC();
p_arg = p_arg;
CPU_Init();
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //统计任务
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OS_CRITICAL_ENTER(); //进入临界区
//创建任务1
OSTaskCreate((OS_TCB * )&Task1TCB,
(CPU_CHAR * )"task1",
(OS_TASK_PTR )task1,
(void * )0,
(OS_PRIO )TASK1_PRIO,
(CPU_STK * )&TASK1_STK[0],
(CPU_STK_SIZE)STK1_SIZE/10,
(CPU_STK_SIZE)STK1_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OS_TaskSuspend((OS_TCB*)&StartTaskTCB,&err); //挂起开始任务
OS_CRITICAL_EXIT(); //进入临界区
}
//TASK1任务函数
void task1(void *p_arg)
{
OS_ERR err;
u16 len=0;
u16 t=0;
p_arg = p_arg;
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
printf("\r\n您发送的消息为:\r\n");
for(t=0;t<len;t++)
{
USART1->DR=USART_RX_BUF[t];
while((USART1->SR&0X40)==0);//等待发送结束
}
printf("\r\n\r\n");//插入换行
USART_RX_STA=0;
}
}
}
文章来源:https://blog.csdn.net/STM89C56/article/details/135340030
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!