Unity中Shader矩阵变换的几何体现
文章目录
前言
我们在这篇文章中,了解一下矩阵的几何意义。
一、点 的 向量表达形式 和 矩阵表达形式
我们在图形计算器中,形象的看一下,这两种表达方式之间的关系
1、点 的 向量表达形式
- 点坐标 可以看作一个 从坐标原点 指向 点P的向量
- 可以把该向量分解为:两个坐标轴方向上的向量之和
- 坐标轴方向上的向量可以由:该坐标轴方向上的单位向量 乘以 P点对应的xy坐标值得到
这样就可以得到:P = i ? \vec i i * Px + j ? \vec j j? * Py
2、点 的 矩阵表达形式
- P =
i
?
\vec i
i * Px +
j
?
\vec j
j? * Py = (1,0) * Px + (0,1) *Py
可以逆推理出: - P = i ? \vec i i * Px + j ? \vec j j? * Py = (1,0) * Px + (0,1) *Py
1
0
0
1
\begin{matrix} 1&0\\ 0&1\\ \end{matrix}
10?01?
*
P
?
x
?
P
?
y
?
\begin{matrix} P~x~\\ P~y~\\ \end{matrix}
P?x?P?y??
=
P
?
x
?
P
?
y
?
\begin{matrix} P~x~ P~y~\\ \end{matrix}
P?x?P?y??
= (Px ,Py)
二、使用二维旋转矩阵来旋转P点
- P3 = Mrotation * P1
- P4 = Mrotation * P2
- c°是顺时针旋转的角度
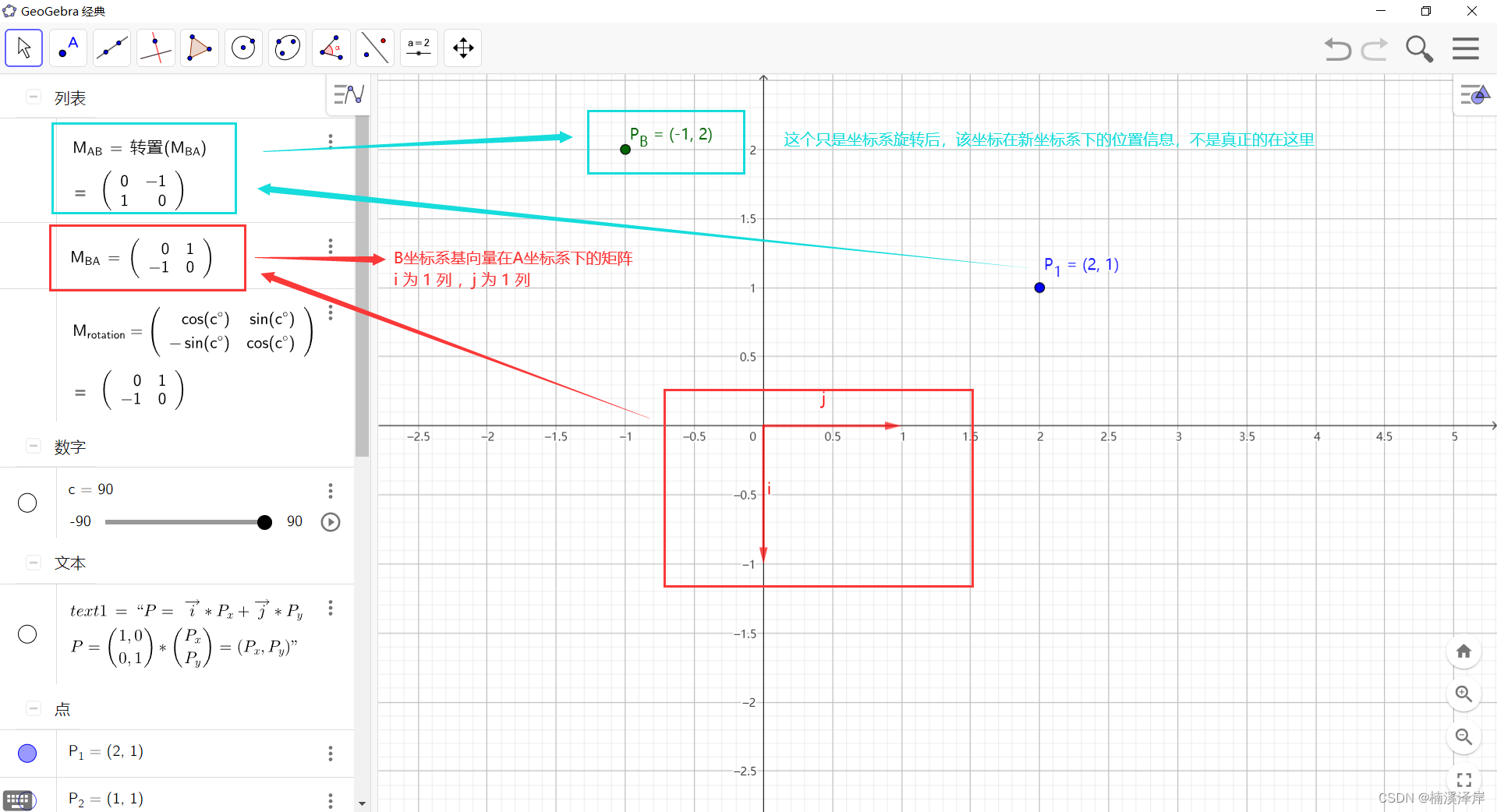
三、怎么求坐标系旋转后 P 点在新坐标系中的坐标
- [PB] = [AB] * [PA]
顶点P在B坐标系下的坐标 = A坐标系的基向量在B坐标系下的坐标所构成的矩阵 * 顶点P在A坐标系下的坐标 - [PA] = [BA] * [PB]
顶点P在A坐标系下的坐标 = B坐标系的基向量在A坐标系下的坐标所构成的矩阵 * 顶点P在B坐标系下的坐标
- 因此,我们可以得出: AB = BA-1
那么,我们要求 P 点在旋转后坐标系B下的坐标,可以这样求:
- 坐标系的基向量是互相垂直的单位向量,构成的矩阵刚好为正交矩阵
- 正交矩阵性质:逆矩阵 = 转置矩阵
- [PB] = [BA]-1*[PA]
1、我们求出 B 坐标系的基向量在 A 坐标系下的矩阵
B坐标系相对于A坐标系顺时针旋转了90°
- 基向量矩阵的构成方法:i 为一列,j为一列
2、求 B 坐标系的基向量在 A 坐标系下的矩阵的逆矩阵(转置矩阵)
3、[PB] = [BA]-1*[PA]
- P1在B坐标系下看为(-1,2)
- PB就是我们所求的结果
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!