【QT 自研上位机 与 ESP32下位机联调>>>串口控制GPIO-基础样例-联合文章】
【QT 自研上位机 与 ESP32下位机联调>>>串口控制GPIO-基础样例-联合文章】
1、概述
最为新手,想要快速入门相关设备,比如ESP32,可能最好的方式就是直接手动去敲一遍代码,而串口算是单片机入门中,必不可少的一个基础课程,很多通讯,以及打印各种信息,都需要,而加入一些交互,能让我们更好调试单片机。
我打算出3章,像之前STM32那种单片机,调试串口一样。
本次第三章,和上位机进行联合调试。
第一章,也就是串口基础篇,简单调试ESP32,进行交互。
第二章,将会结合GPIO,进行一些简单外围控制。
第三章,将会结合上位机,使用自制上位机进行联合调试。
2、实验环境
ESP32说明:ESP32-S3 是一款集成 2.4 GHz Wi-Fi 和 Bluetooth 5 (LE) 的 MCU 芯片,支持远距离模式 (Long Range)。ESP32-S3 搭载 Xtensa? 32 位 LX7 双核处理器,主频高达 240 MHz,内置 512 KB SRAM (TCM),具有 45 个可编程 GPIO 管脚和丰富的通信接口。ESP32-S3 支持更大容量的高速 Octal SPI flash 和片外 RAM,支持用户配置数据缓存与指令缓存。
硬件信息:开发板 ESP32-S3-DevKitM-1(EPS32-S3-wroom-1模块)
调试环境:Windows下
串口工具:USB转串口TTL/232等
其他硬件:逻辑分析仪,杜邦线,两个usb-type-c连接线等。
3、 自我总结
有了调试串口的经验,再加上调试IO的经验,其实我们就很容易合在一起,就像那个很有意思的笑话,苹果的英文单词和笔的单词,组合在一起的就是笔记本了。
如下,请允许我在原本应该严肃的科技博文中,加入一个搞笑的部分。

但是这个道理是相通的,我们学习一个东西的时候,其实一块一块学的,或者说以小见大。
举个例子,我们之前学习了ESP32的串口,
【PC电脑windows编写代码-学习uart0串口编写代码-串口程序-ESP32-简单通讯交互-基础样例学习】
同时又做了ESP32的IO实验,
【PC电脑windows-学习样例generic_gpio-拓展GPIO-ESP32的GPIO程序-问题解决-GPIO输出实验-基础样例学习(2)】
那么现在组合起来就可以了。
自己之前就有做联合文章的经历,从上位机,到下位机,一整条链路,一次性打通,学习每个部分,最后组合在一起,其实多少有些分繁琐而简化。
就像之前文章一样。
【QT 自研上位机 与 STM32F4xx下位机联调>>>can通信测试-基础样例-联合文章】
【QT 自研上位机 与 STM32F103下位机联调>>>串口uart通信测试-基础样例-联合文章】
也就有了本次实验,以及这篇文章。
4、 实验过程
1、验证上位机QT程序
上位机这块我们采用之前的串口工厂简单修改,来完成我们的目标。
【QT 5 调试软件+串口相关初试串口+基础样例】
1、下载样例代码
(1)下载代码
代码连接:https://download.csdn.net/download/qq_22146161/86722251
使用qt开,然后硬件转换器短接。

qt运行原件如下,可以看到能收到自己发出的“123”
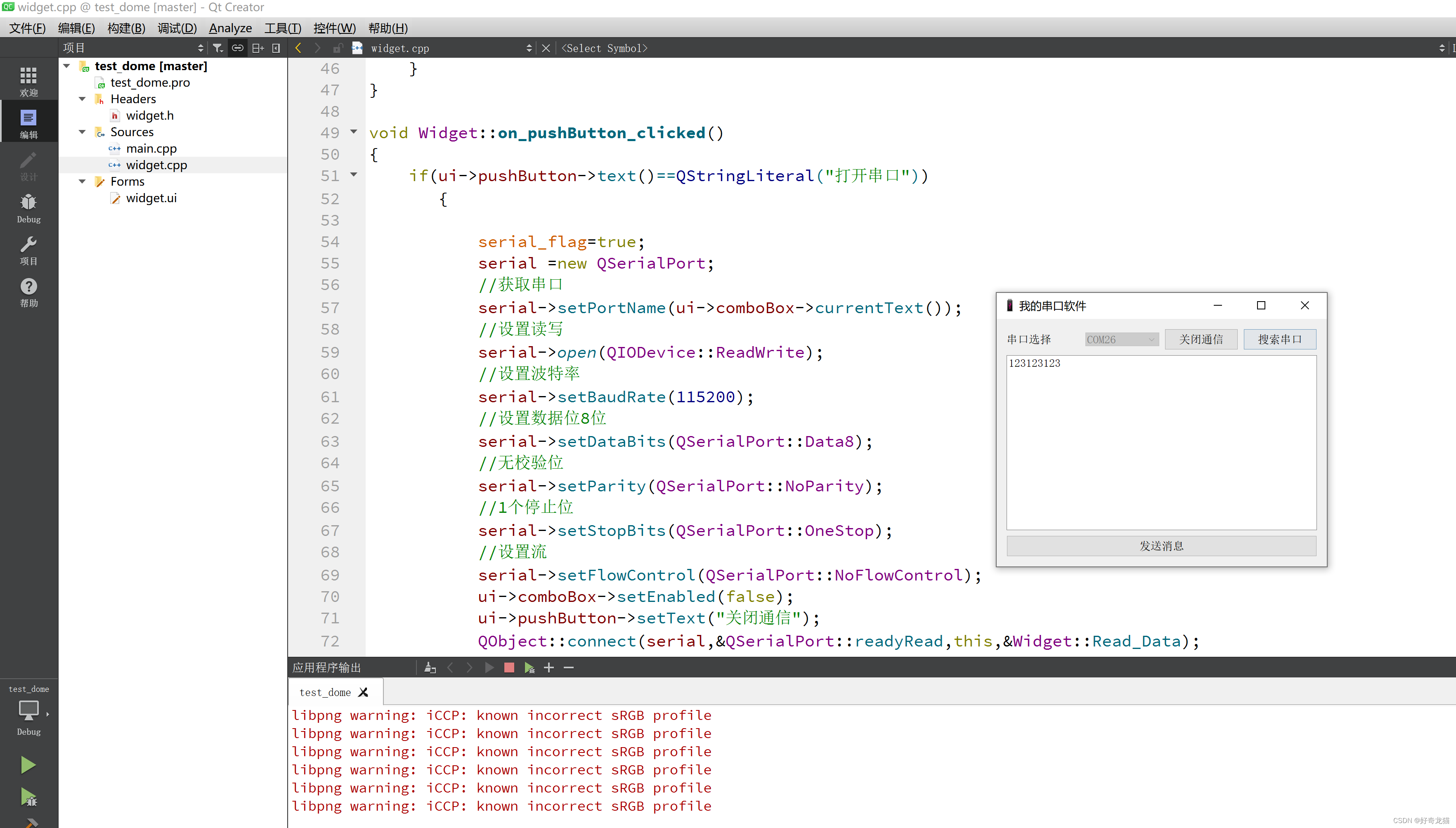
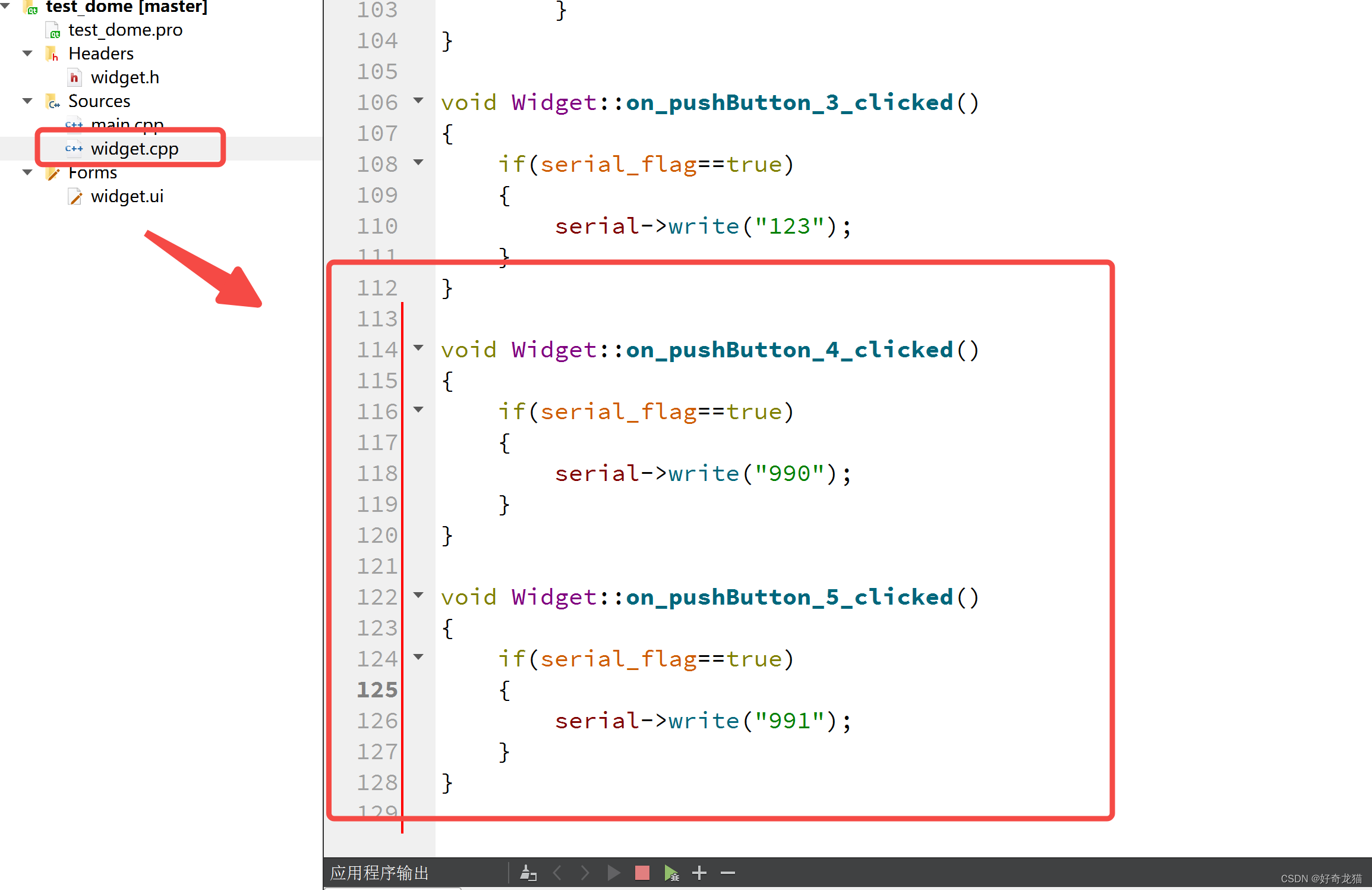
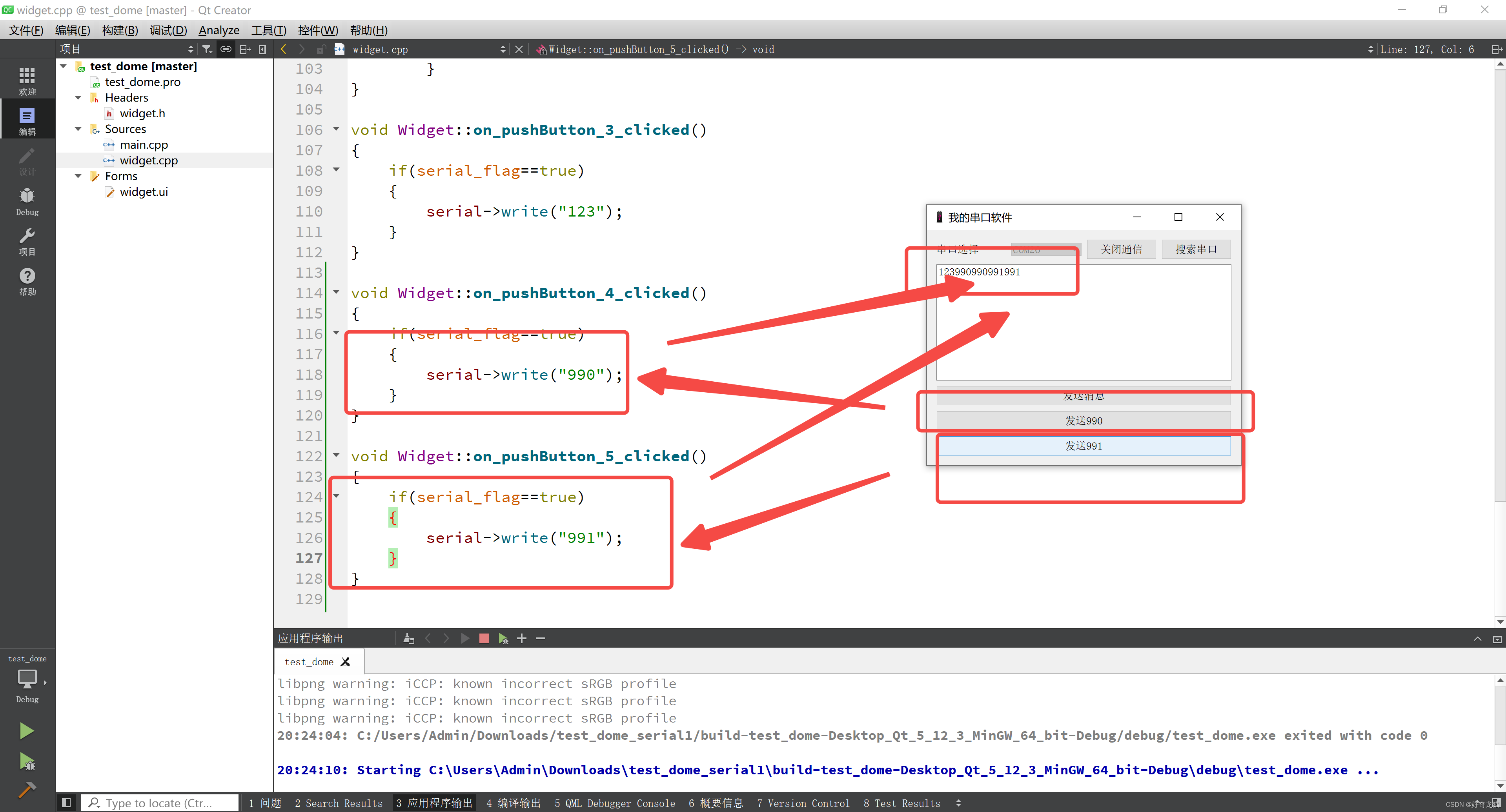
2、修改qt程序
我们简单改写程序,发出990和991,好和ESP32配合
(1)ui界面修改
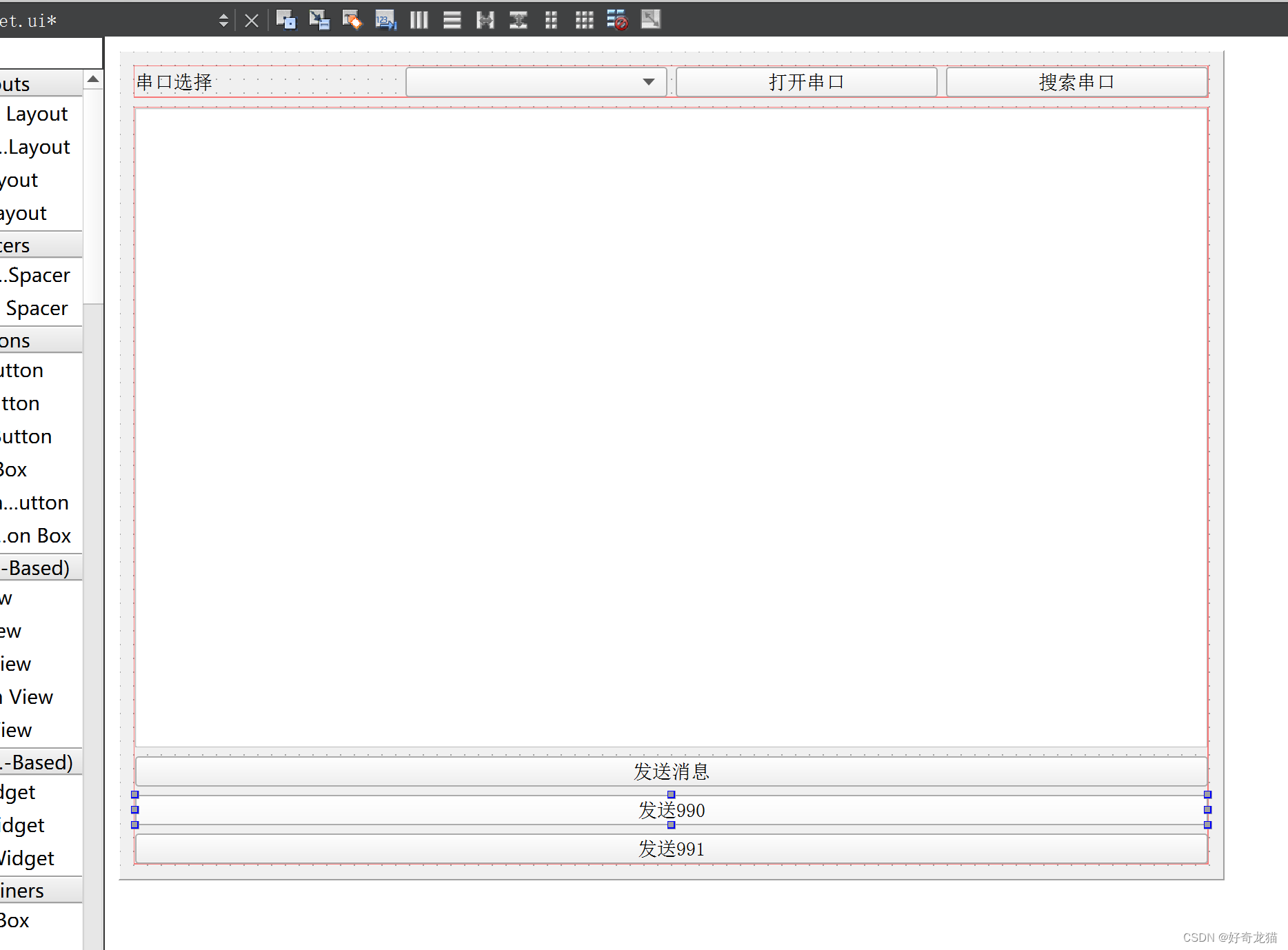
(2)转到槽函数
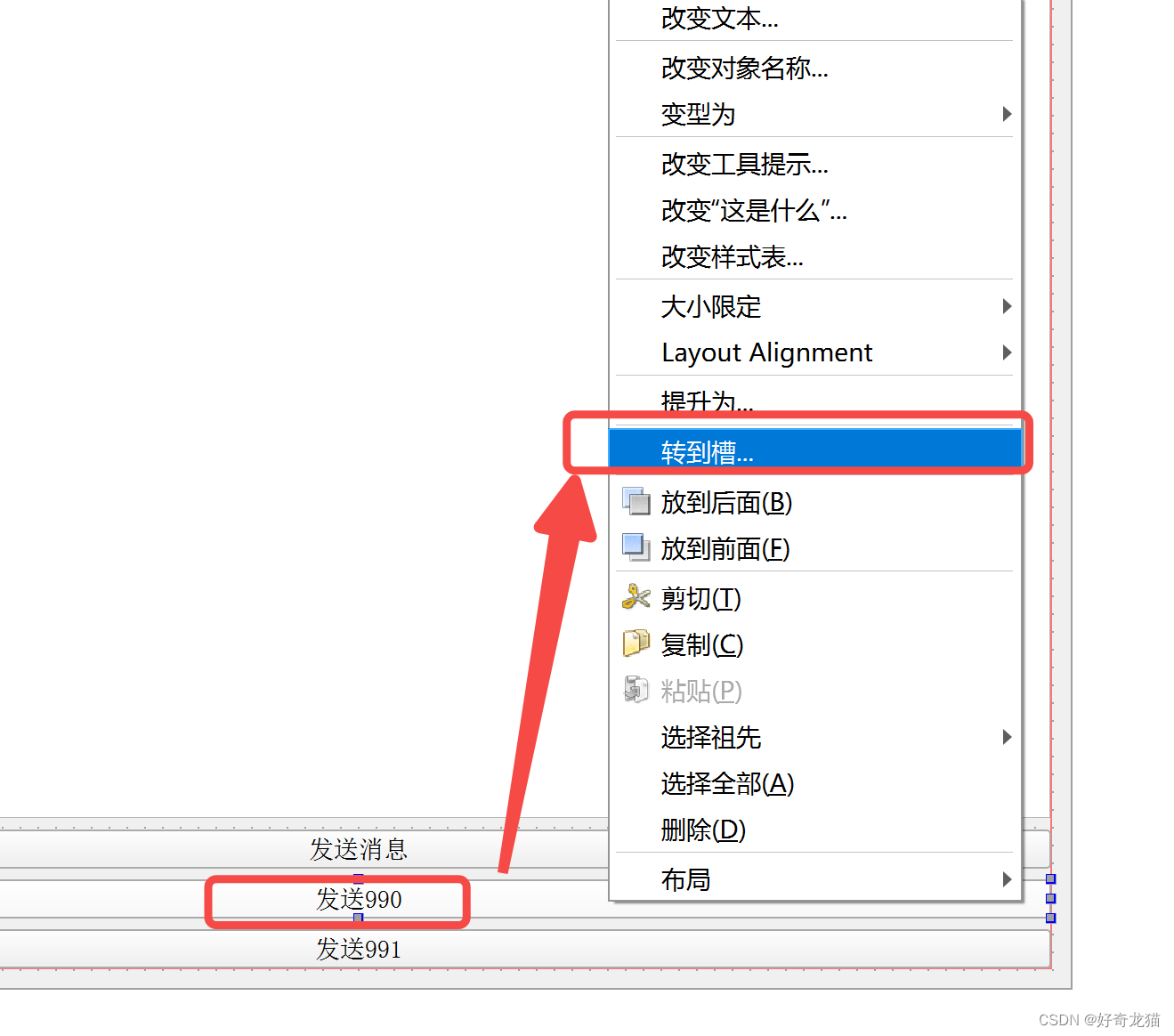
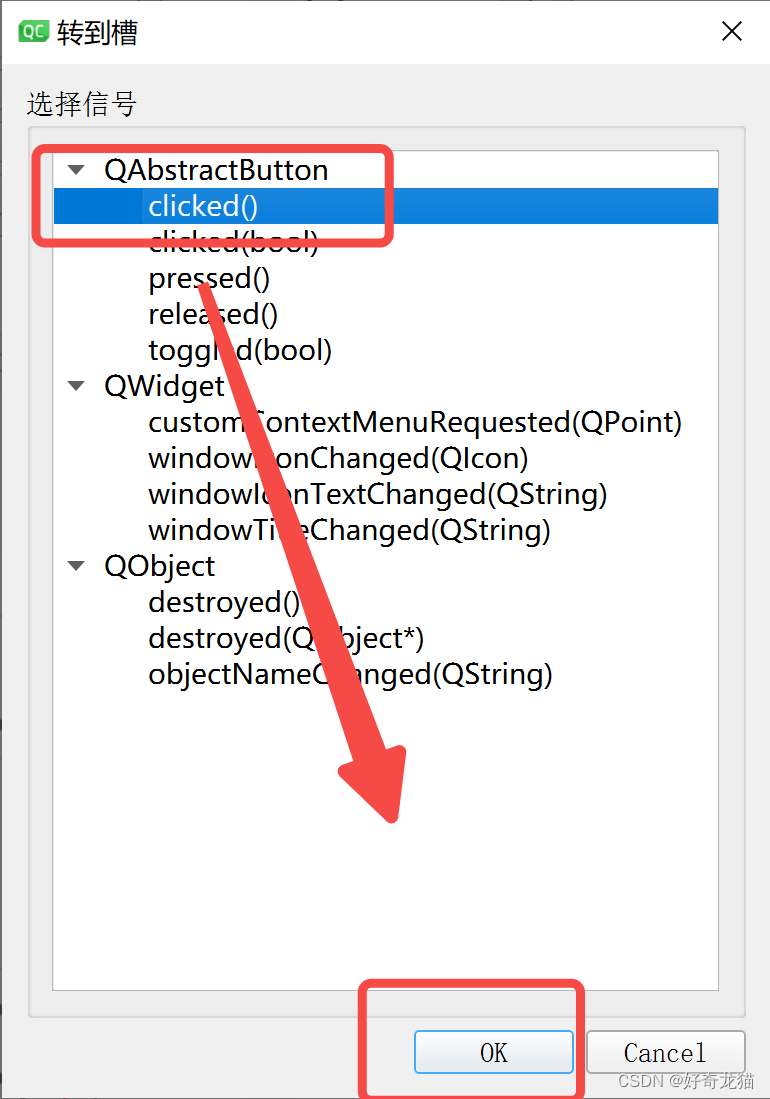
(3)加入代码
3、运行测试验证
2、验证下位机ESP32程序
样例用的下ESP32,如下文章中的。同样的也是验证下。
【PC电脑windows编写代码-ESP32-串口控制GPIO编写代码-简单通讯交互控制IO-进阶样例学习-2】
1、下载样例代码
代码链接:https://download.csdn.net/download/qq_22146161/88678030
2、更改ESP32代码,编译下载
我们在990这条命令上,专门做了个双IO拉低拉高,这样好检验。
#include <stdio.h>
#include <stdbool.h>
#include <unistd.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "driver/uart.h"
#include "string.h"
#include "driver/gpio.h"
#define TX_PIN 18
#define RX_PIN 19
#define BUF_SIZE 1024
const char *expected_string0 = "990";
const char *expected_string1 = "991";
const char *expected_string2 = "992";
const char *expected_string3 = "993";
const char *expected_string4 = "994";
const char *expected_string5 = "995";
const char *expected_string6 = "996";
#define GPIO_OUTPUT_IO_0 35
#define GPIO_OUTPUT_IO_1 36
#define GPIO_OUTPUT_IO_2 37
#define GPIO_OUTPUT_IO_3 38
#define GPIO_OUTPUT_PIN_SEL ((1ULL<<GPIO_OUTPUT_IO_0) |(1ULL<<GPIO_OUTPUT_IO_1) | (1ULL<<GPIO_OUTPUT_IO_2) | (1ULL<<GPIO_OUTPUT_IO_3)) // 配置GPIO_OUT位寄存器
void gpio_init(void)
{
gpio_config_t io_conf; // 定义一个gpio_config类型的结构体,下面的都算对其进行的配置
io_conf.intr_type = GPIO_INTR_DISABLE; // 禁止中断
io_conf.mode = GPIO_MODE_OUTPUT; // 选择输出模式
io_conf.pin_bit_mask = GPIO_OUTPUT_PIN_SEL; // 配置GPIO_OUT寄存器
io_conf.pull_down_en = 0; // 禁止下拉
io_conf.pull_up_en = 1; // 禁止上拉
gpio_config(&io_conf); // 最后配置使能
}
void app_main(void) {
gpio_init();
// 配置UART参数
uart_config_t uart_config = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.parity = UART_PARITY_DISABLE,
.stop_bits = UART_STOP_BITS_1,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE
};
uart_param_config(UART_NUM_0, &uart_config);
// 设置UART1使用的TX和RX引脚
uart_set_pin(UART_NUM_0, TX_PIN, RX_PIN, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
// 安装UART驱动程序,使用默认缓冲区大小
uart_driver_install(UART_NUM_0, BUF_SIZE * 2, BUF_SIZE * 2, 0, NULL, 0);
// 发送和接收数据的缓冲区
uint8_t *data = (uint8_t *)malloc(BUF_SIZE);
const char *test_str0 = "write_this_is_990";
const char *test_str1 = "write_this_is_991";
const char *test_str2 = "write_this_is_992";
const char *test_str3 = "write_this_is_993";
const char *test_str4 = "write_this_is_994";
const char *test_str5 = "write_this_is_995";
const char *test_str6 = "write_this_is_996";
while (1) {
// 发送数据
const char *test_str = "Hello from UART01!";
uart_write_bytes(UART_NUM_0, test_str, strlen(test_str));
// 从UART接收数据
int length = 0;
ESP_ERROR_CHECK(uart_get_buffered_data_len(UART_NUM_0, (size_t *)&length));
length = uart_read_bytes(UART_NUM_0, data, length, 20 / portTICK_PERIOD_MS);
if (length > 0) {
data[length] = 0; // 确保字符串以null终止
printf("Received data: '%s'\n", (char *)data);
gpio_set_level(GPIO_OUTPUT_IO_0, 0); // 把这个GPIO输出地电平
vTaskDelay(10 / portTICK_PERIOD_MS);
gpio_set_level(GPIO_OUTPUT_IO_0, 1);
vTaskDelay(10 / portTICK_PERIOD_MS);
//控制第一个IO上下
if(strstr ((const char *)data, expected_string0)!=NULL )
{
uart_write_bytes(UART_NUM_0, test_str0, strlen(test_str0));
gpio_set_level(GPIO_OUTPUT_IO_0, 0); // 把这个GPIO输出地电平
vTaskDelay(1000 / portTICK_PERIOD_MS);
gpio_set_level(GPIO_OUTPUT_IO_1, 0); // 把这个GPIO输出地电平
vTaskDelay(1000 / portTICK_PERIOD_MS);
gpio_set_level(GPIO_OUTPUT_IO_1, 1); // 把这个GPIO输出地高平
vTaskDelay(1000 / portTICK_PERIOD_MS);
gpio_set_level(GPIO_OUTPUT_IO_0, 1); // 把这个GPIO输出地高平
vTaskDelay(1000 / portTICK_PERIOD_MS);
printf("this is 990!");
// break;
}
if(strstr ((const char *)data, expected_string1) !=NULL )
{
uart_write_bytes(UART_NUM_0, test_str1, strlen(test_str1));
gpio_set_level(GPIO_OUTPUT_IO_0, 0); // 把这个GPIO输出低电平
printf("this is 991!");
// break;
}
//控制第二个IO上下
if(strstr ((const char *)data, expected_string2)!=NULL )
{
uart_write_bytes(UART_NUM_0, test_str2, strlen(test_str2));
gpio_set_level(GPIO_OUTPUT_IO_1, 1); // 把这个GPIO输出高电平
printf("this is 992!");
// break;
}
if(strstr ((const char *)data, expected_string3)!=NULL )
{
uart_write_bytes(UART_NUM_0, test_str3, strlen(test_str3));
gpio_set_level(GPIO_OUTPUT_IO_1, 0); // 把这个GPIO输出低电平
printf("this is 993!");
// break;
}
//控制第三个IO上下
if(strstr ((const char *)data, expected_string4)!=NULL )
{
uart_write_bytes(UART_NUM_0, test_str4, strlen(test_str4));
gpio_set_level(GPIO_OUTPUT_IO_2, 1); // 把这个GPIO输出高电平
printf("this is 994");
// break;
}
if(strstr ((const char *)data, expected_string5)!=NULL )
{
uart_write_bytes(UART_NUM_0, test_str5, strlen(test_str5));
gpio_set_level(GPIO_OUTPUT_IO_2, 0); // 把这个GPIO输出低电平
printf("this is 995!");
// break;
}
//单独功能
if(strstr ((const char *)data, expected_string6)!=NULL )
{
uart_write_bytes(UART_NUM_0, test_str6, strlen(test_str6));
//gpio_set_level(GPIO_OUTPUT_IO_2, 0); // 把这个GPIO输出低电平
printf("this is 996!");
// break;
}
}
vTaskDelay(2000 / portTICK_PERIOD_MS);
}
}
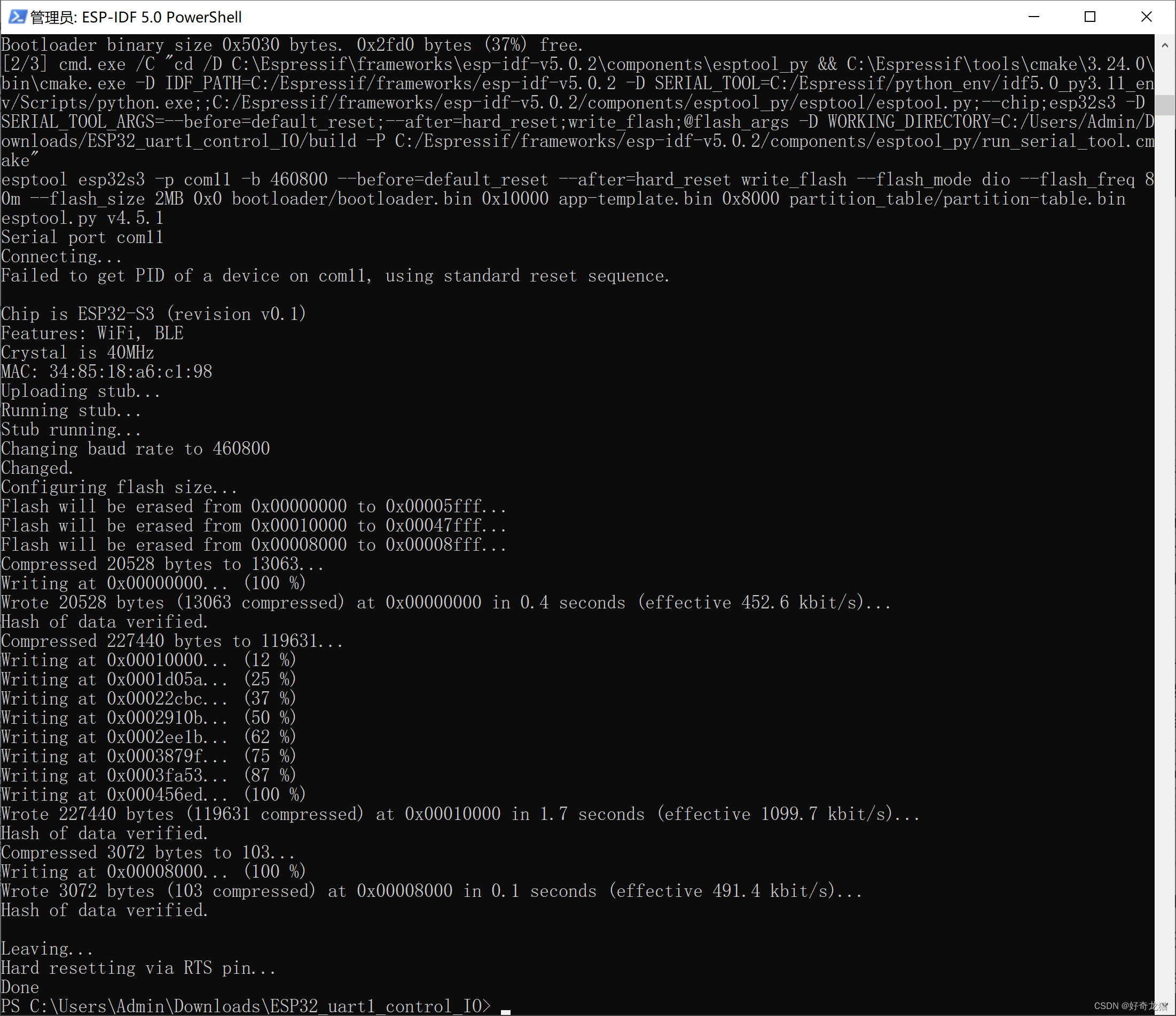
下载完了按下复位
3、验证
硬件连接
3/5V IN --- ESP32-18
3V OUT --- ESP32-19
GND --- GND

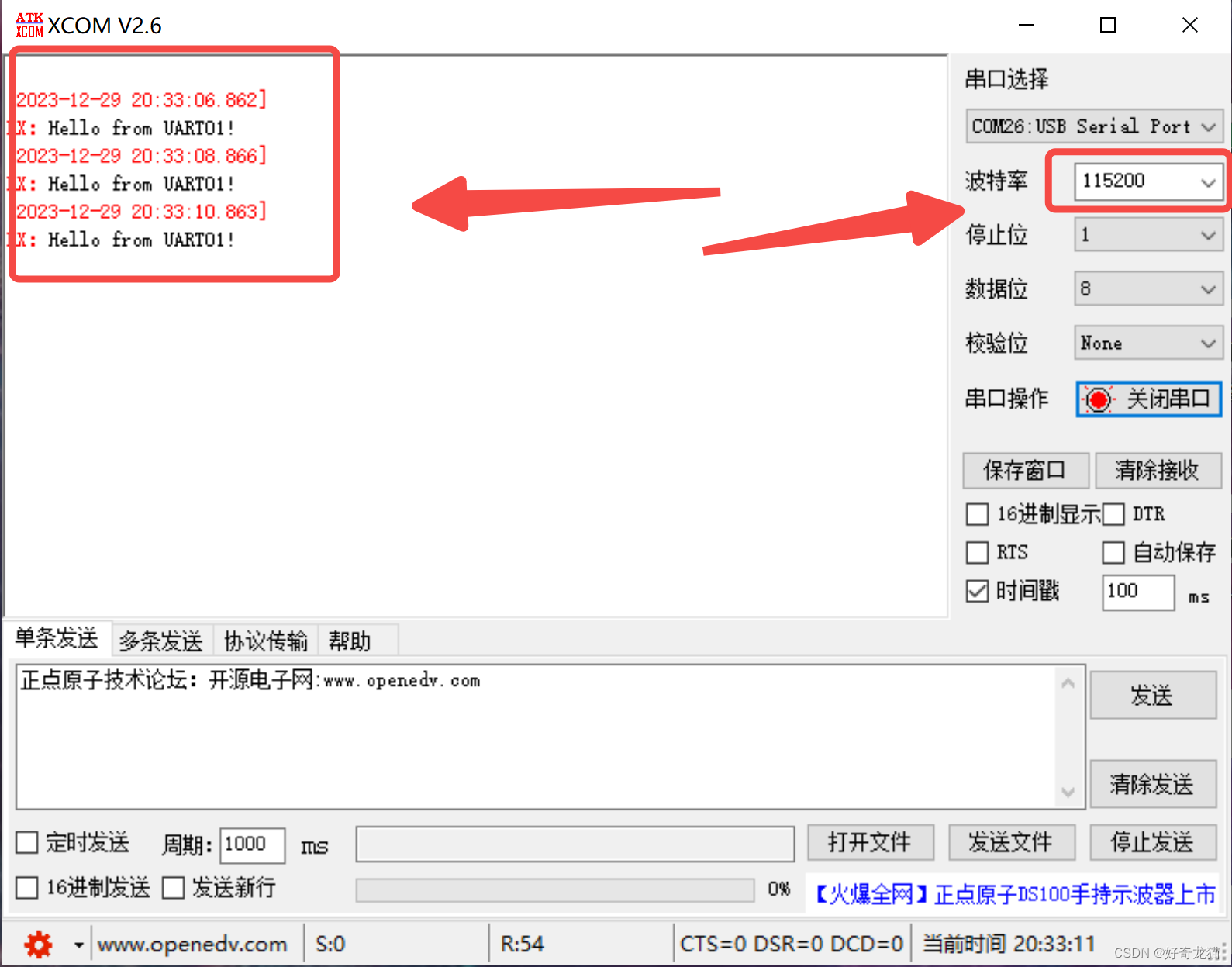
然后使用一个串口软件打开,看看是否能收到消息。
3、联合调试-ESP32和qt上位机
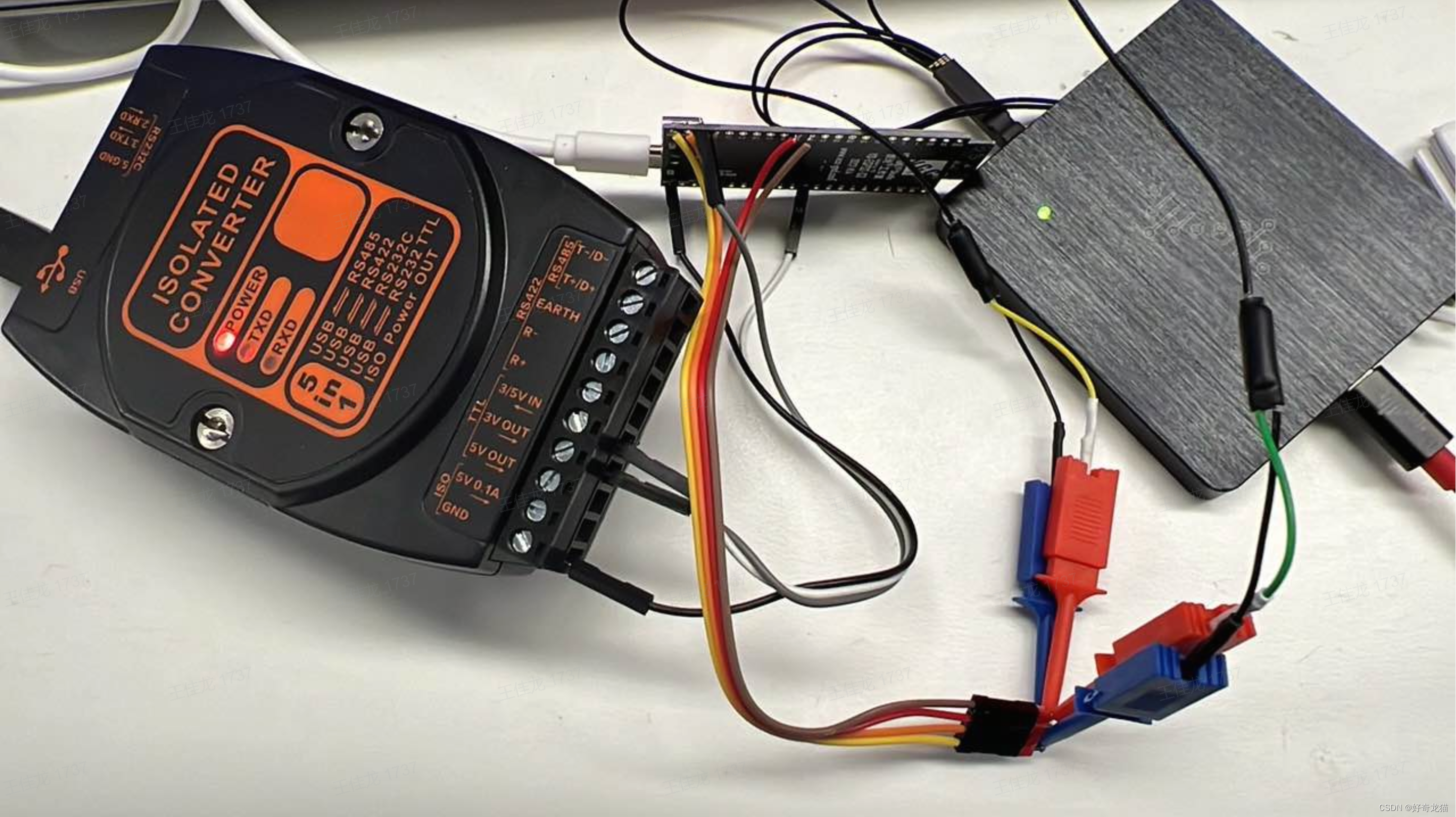
1、硬件连接
其实到目前位置,硬件连接已经完成了。
当然我们还需要接上逻辑分析仪
3/5V IN --- ESP32-18
3V OUT --- ESP32-19
GND --- GND
//逻辑分析仪
GND ---- GND
0通道 ---- ESP32-35
GND ---- GND
1通道 ---- ESP32-36
2、验证
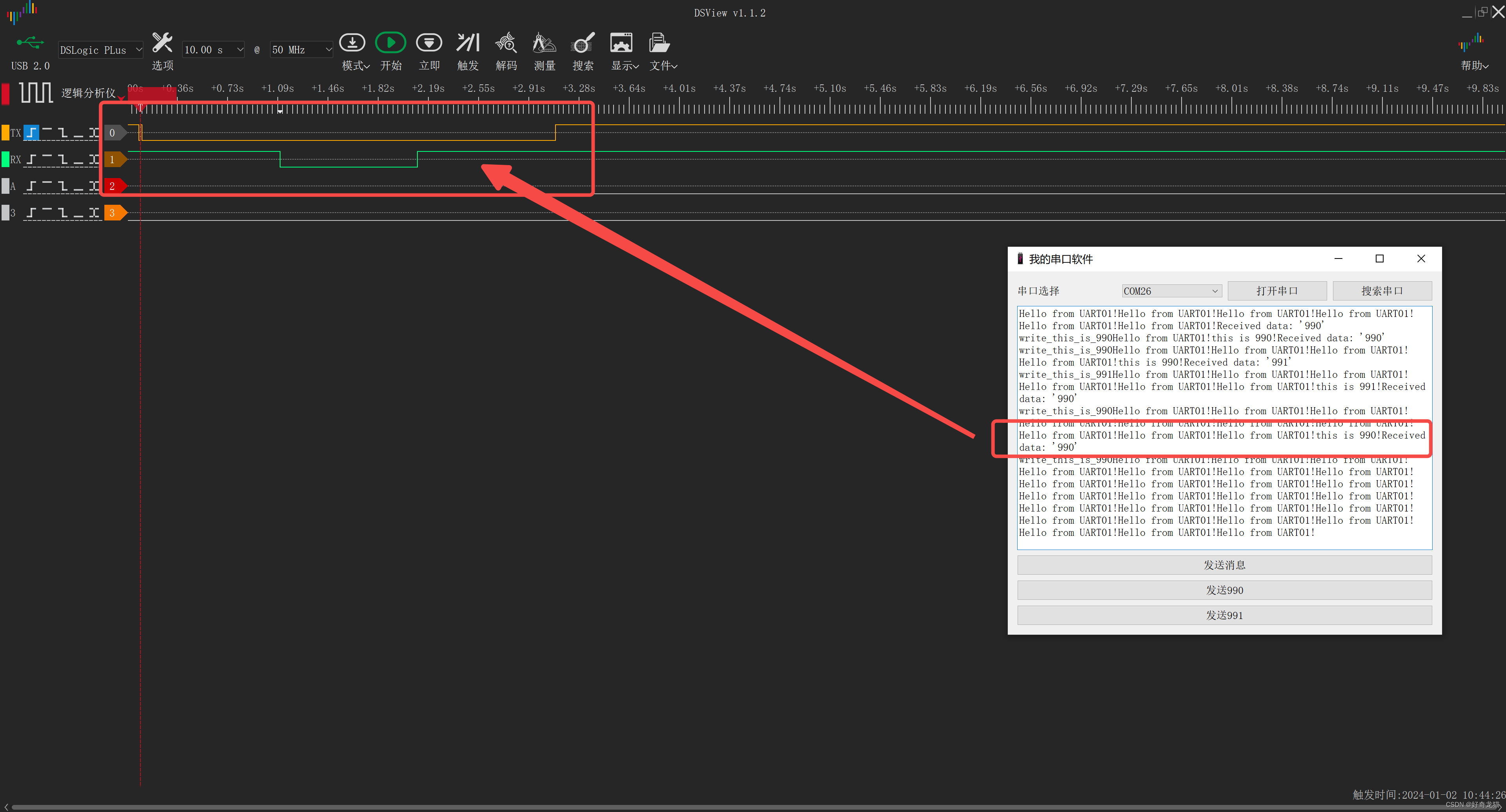
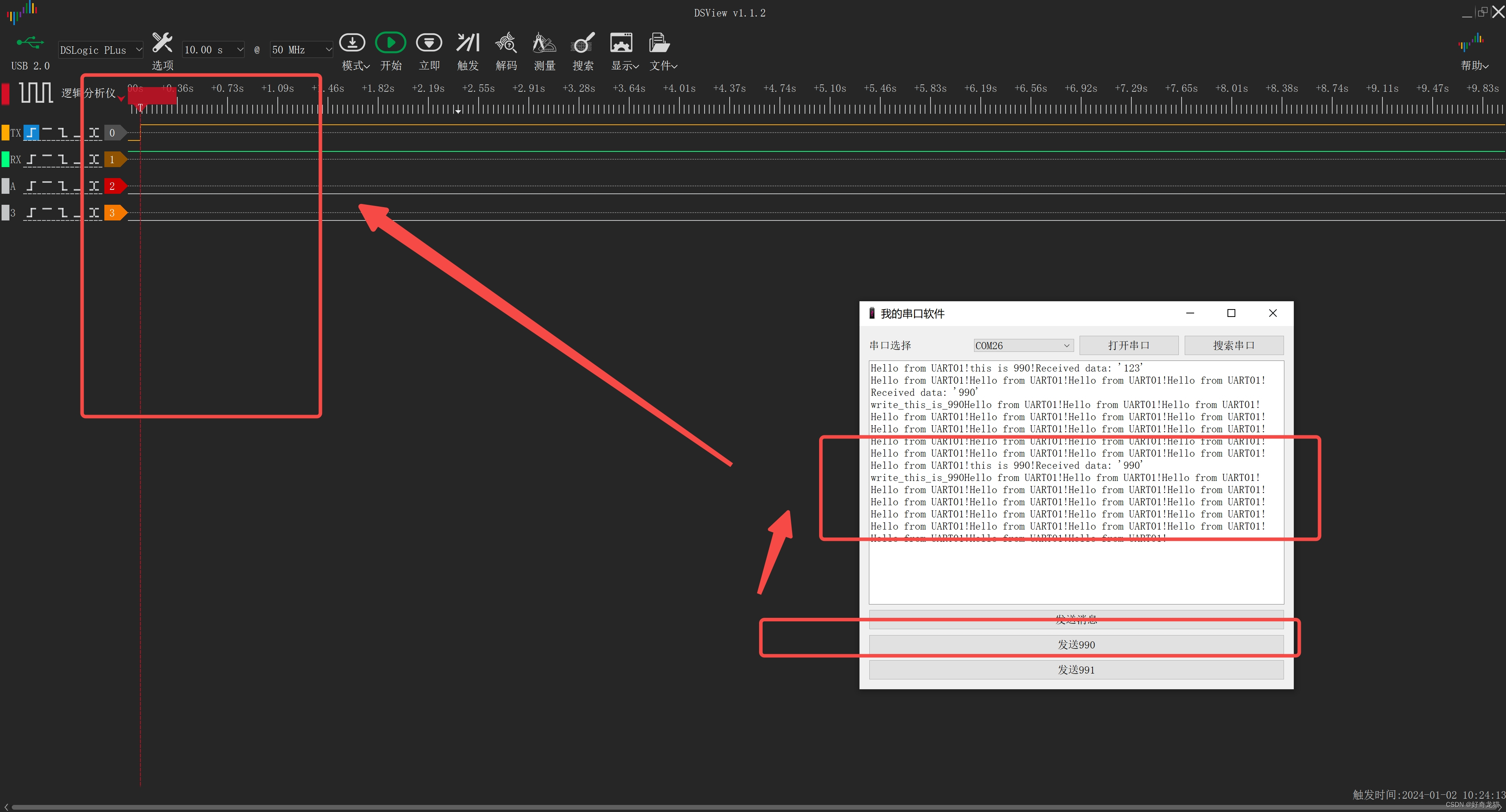
(1)上位机软件和逻辑分析仪截图说明
如下,为上位机发送990后,上位机>>>通过通讯>>>单片机>>>IO控制>>>逻辑分析仪,整条链路。
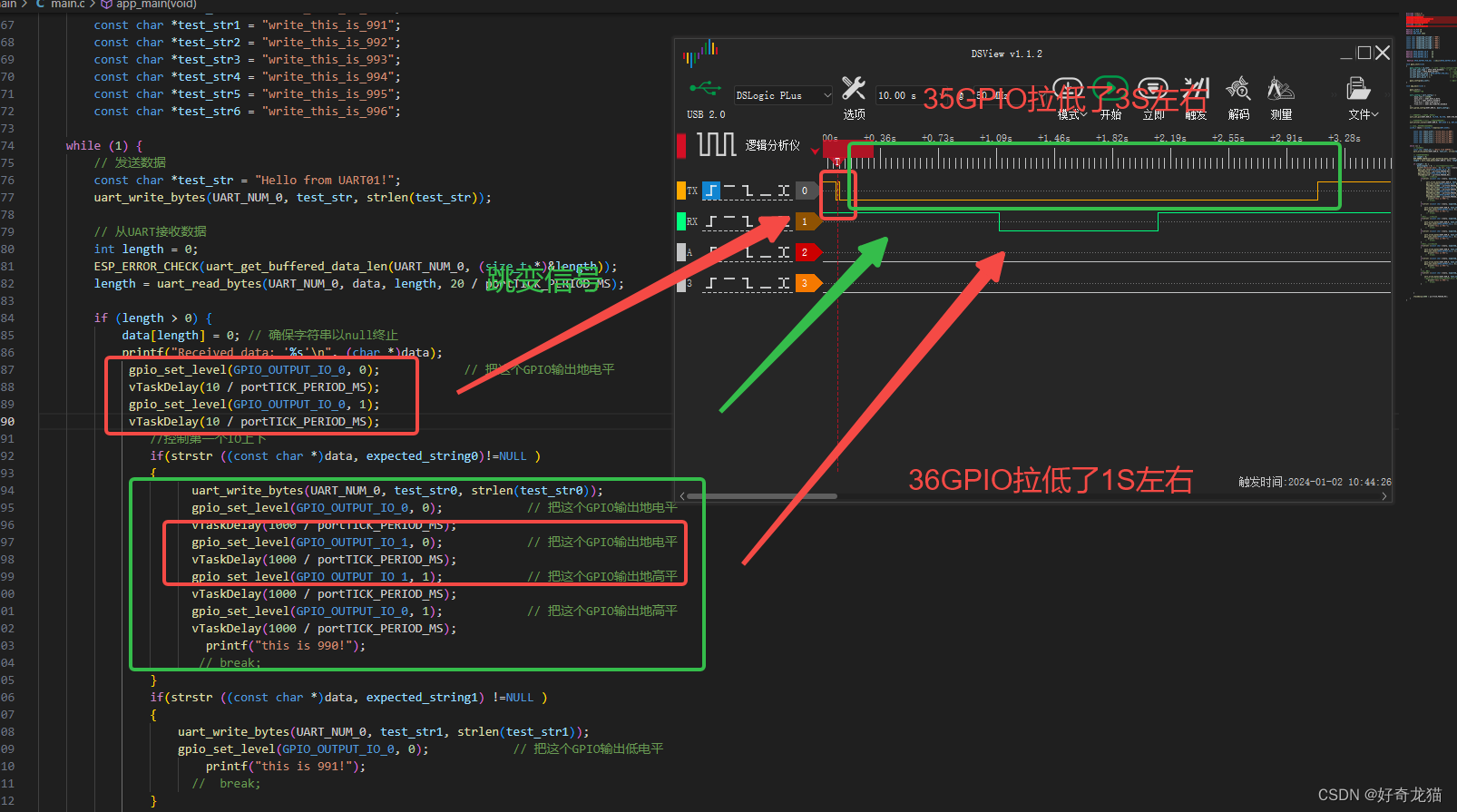
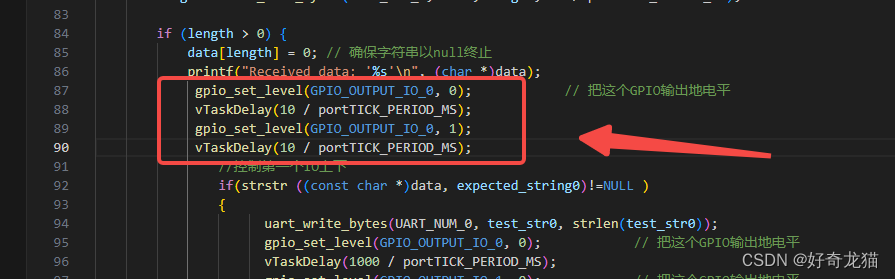
(1)代码和逻辑分析仪截图说明
这块要简单分析下代码,35GPIO先跳变了下,然后拉低3S,在此期间36GPIO拉低了1S。
5、代码连接
一套解决办法吧,需要代码的自取。
代码链接:https://download.csdn.net/download/qq_22146161/88689386
6、细节部分
(1)常见错误解决办法:
调试单片机的时候,或者说调试串口的时候,其实很难问题穷尽,但是一些方式,可以帮我们更快定位。
- UART配置错误:确保你的UART配置与你所使用的引脚和硬件设置相匹配。检查波特率、数据位、校验位和停止位是否正确配置。
- GPIO引脚不正确或被占用:检查你用作UART的GPIO引脚是否正确,并且没有被其他功能(如SPI、I2C或内置功能)占用。
- UART驱动安装问题:确保UART驱动正确安装,没有内存分配错误或其他问题。
- 缓冲区问题:检查是否有足够的空间在UART的发送缓冲区中存储要发送的数据。如果缓冲区已满,可能需要增加缓冲区大小或等待缓冲区可用。
- 硬件问题:检查你的ESP32开发板和任何连接的串行设备是否存在硬件故障。
电源和接地问题:确保所有设备都有适当的电源和接地。
为了解决这个问题,可以尝试以下步骤:
- 重新检查UART配置:确保UART的初始化和配置正确无误。
- 检查GPIO引脚:验证所选择的GPIO引脚是否适合用作UART,且未被占用。
- 检查驱动安装:确保使用 uart_driver_install 函数正确安装了UART驱动。
- 增加缓冲区大小:如果需要,可以在调用 uart_driver_install 时增加缓冲区大小。
- 硬件检查:检查ESP32开发板和相关硬件是否有任何明显的损坏或连接问题。
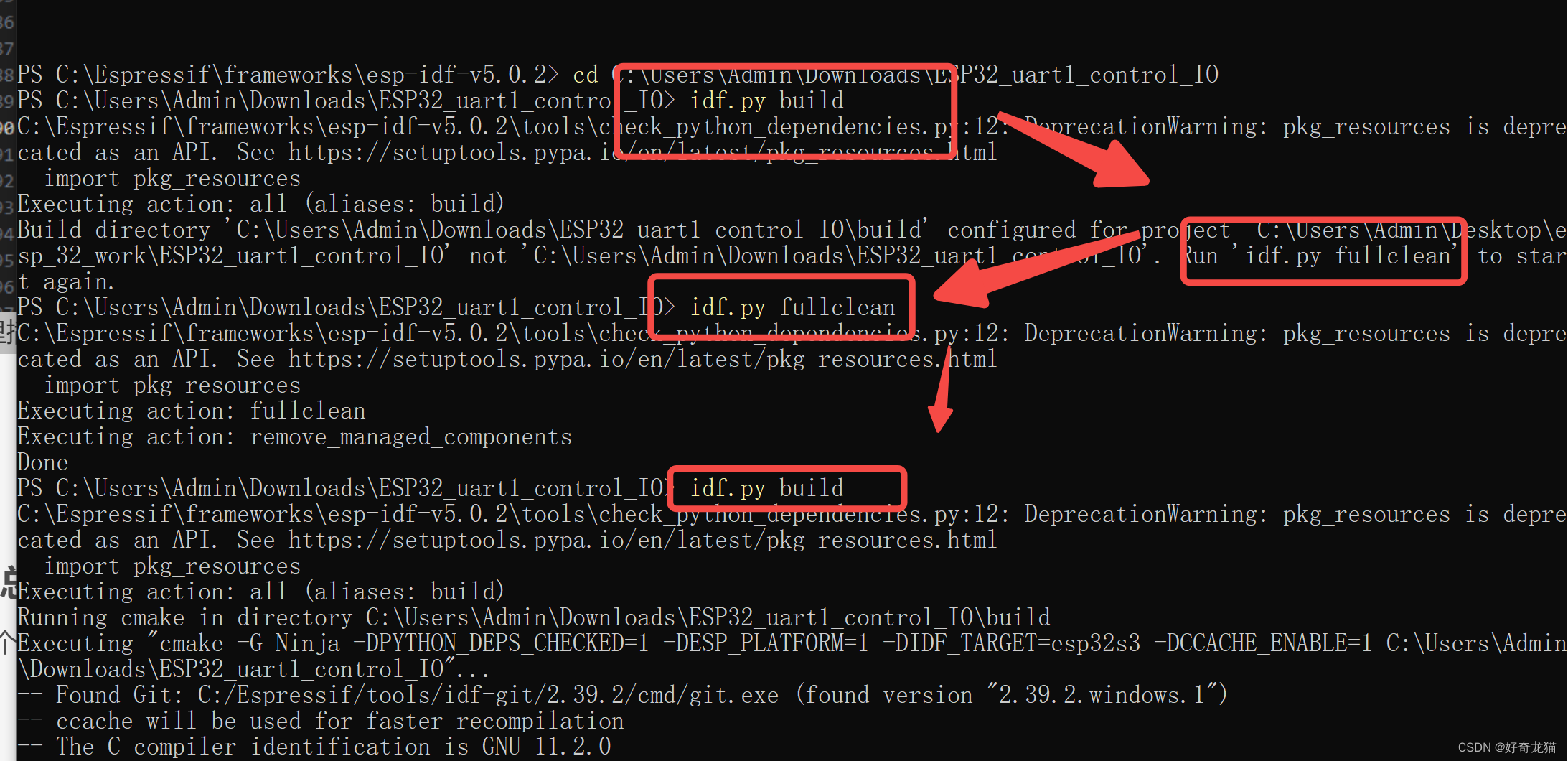
(2)ESP32工程下载后,先清理下
自己在下载过程中,发现直接编译也就是“idf.py build”的时候,会提示下,最好先清理下,然后重新编译。
(3)逻辑分析仪,需要跳变信号触发
如下,逻辑分析仪,在使用的时候,还是需要注意一下,它需要一个跳变信号,否则就会像下图一样,一直等待。
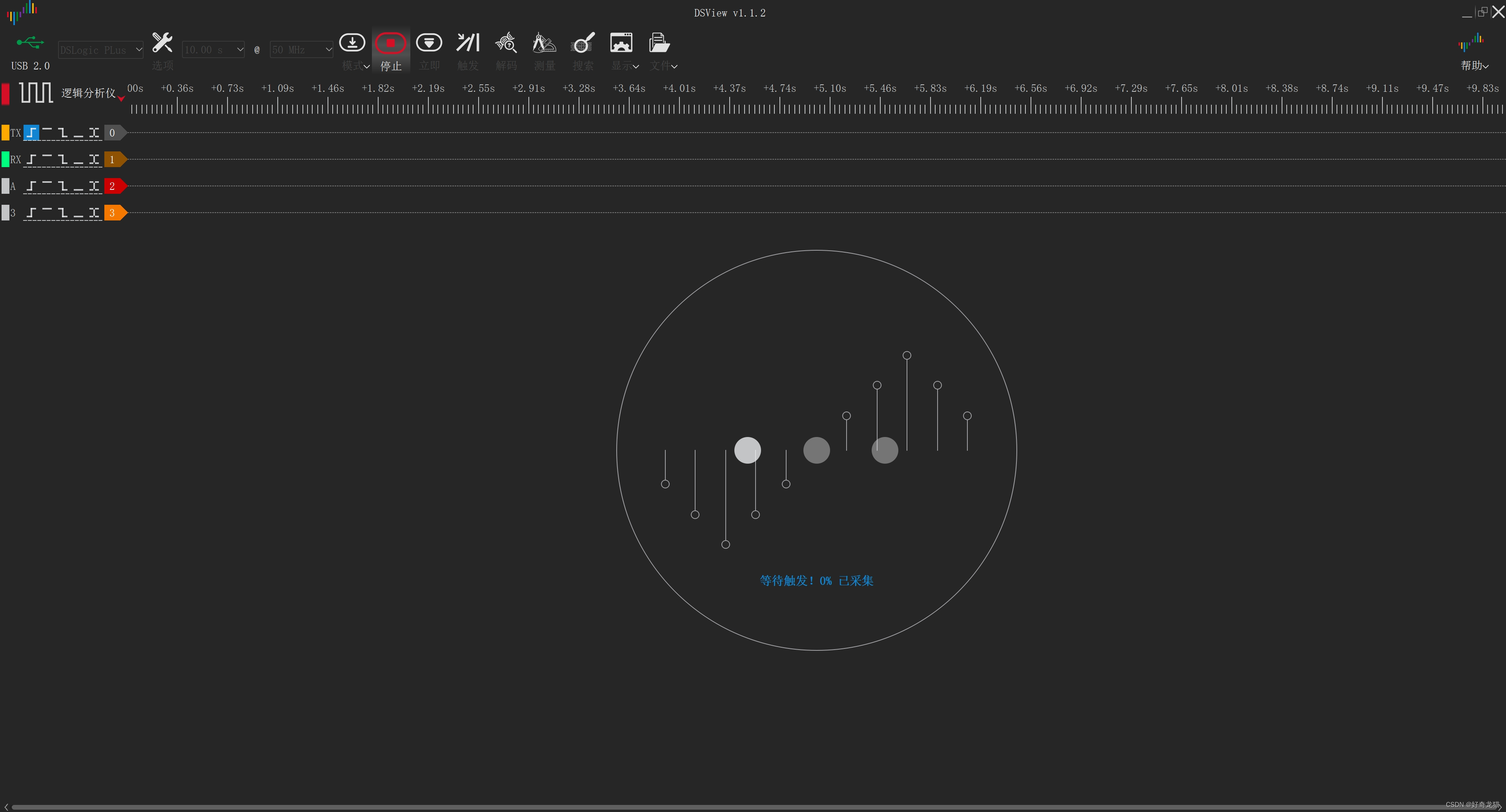
而且实际抓取信号,只后半部分,被拉高部分。
所以我们时间调试时,只要收到消息,先来个跳变信号触发下。
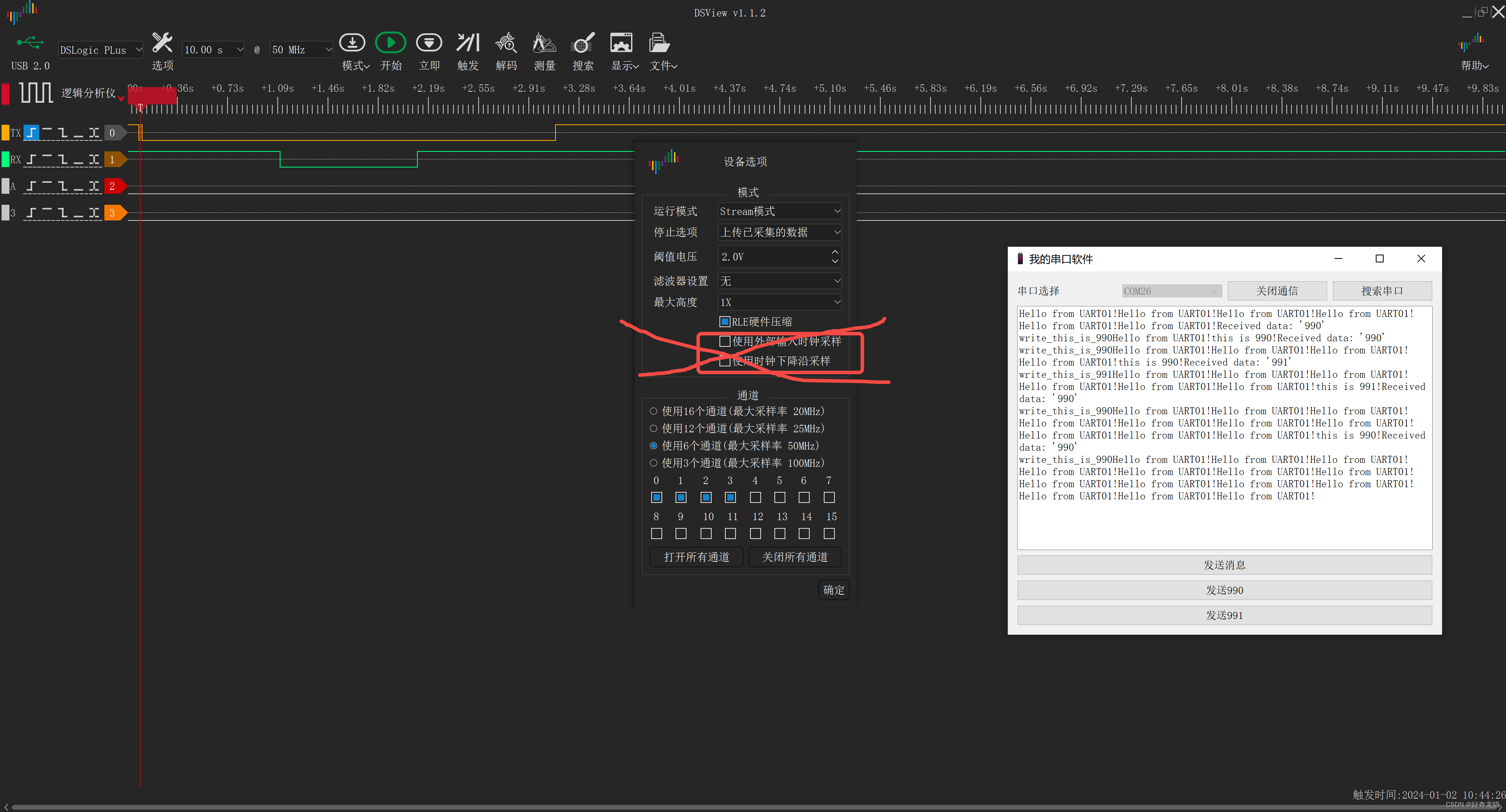
(4)逻辑分析仪,触发触发选择不点下面两个
实际想直接进行采集的,就把下面两个也点上了,实际测试应该是不选择下面两个
7、总结
如此一来,ESP32也有联合文章了。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!