STM32——超声波传感器


需求:
?
接线:
?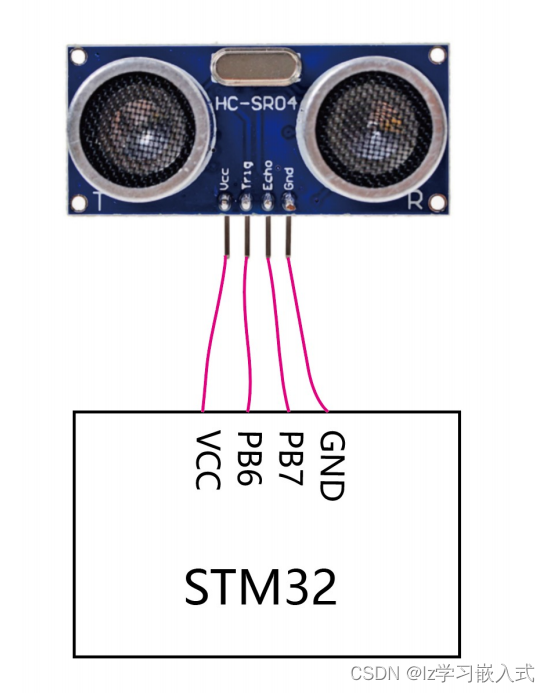
?
定时器配置:
?

编写微秒级函数:
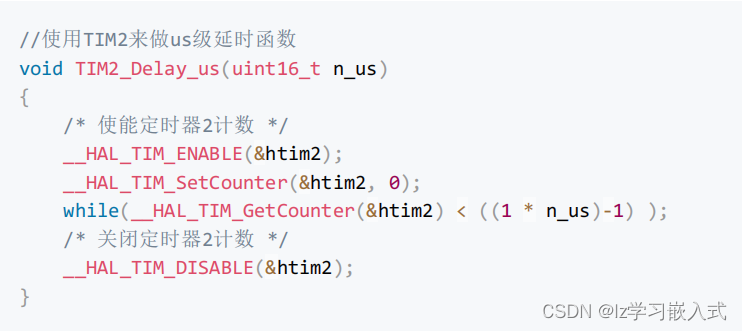
1、总结 微秒级定时:
这个延迟函数的实现利用了定时器 TIM2 的计数器来测量时间,从而实现微秒级的延迟。在一些嵌入式系统中,这种方式是常见的延迟实现方法。请注意,这种忙等待的方式可能在一些场景中不够精确,因为它依赖于系统的时钟频率。在一些要求更高精度的场合,可能需要采用其他延迟方式,比如使用硬件定时器或者其他精确的定时方法。?
2、(1 * n_us)-1)是什么意思?为什么要减一呢?
表达式 (1 * n_us) - 1 其实等价于 n_us - 1。在这里,1 * n_us 实际上就是 n_us,因为任何数乘以1都等于它本身。所以,这个表达式就是为了减小 n_us 的值。
在实际应用中,通常采用这种方式是为了确保延迟的准确性。假设你要延迟 10 微秒,但由于延迟函数本身也需要一定的时间,为了确保总延迟时间是准确的,你可能会将计数器的目标值设置为 n_us - 1。
例如,如果 n_us 为10,那么 (1 * n_us) - 1 就是 9。这意味着在计数器达到9之前,循环会一直等待。这是一种补偿,以考虑延迟函数自身的执行时间,确保总体延迟接近预期值。
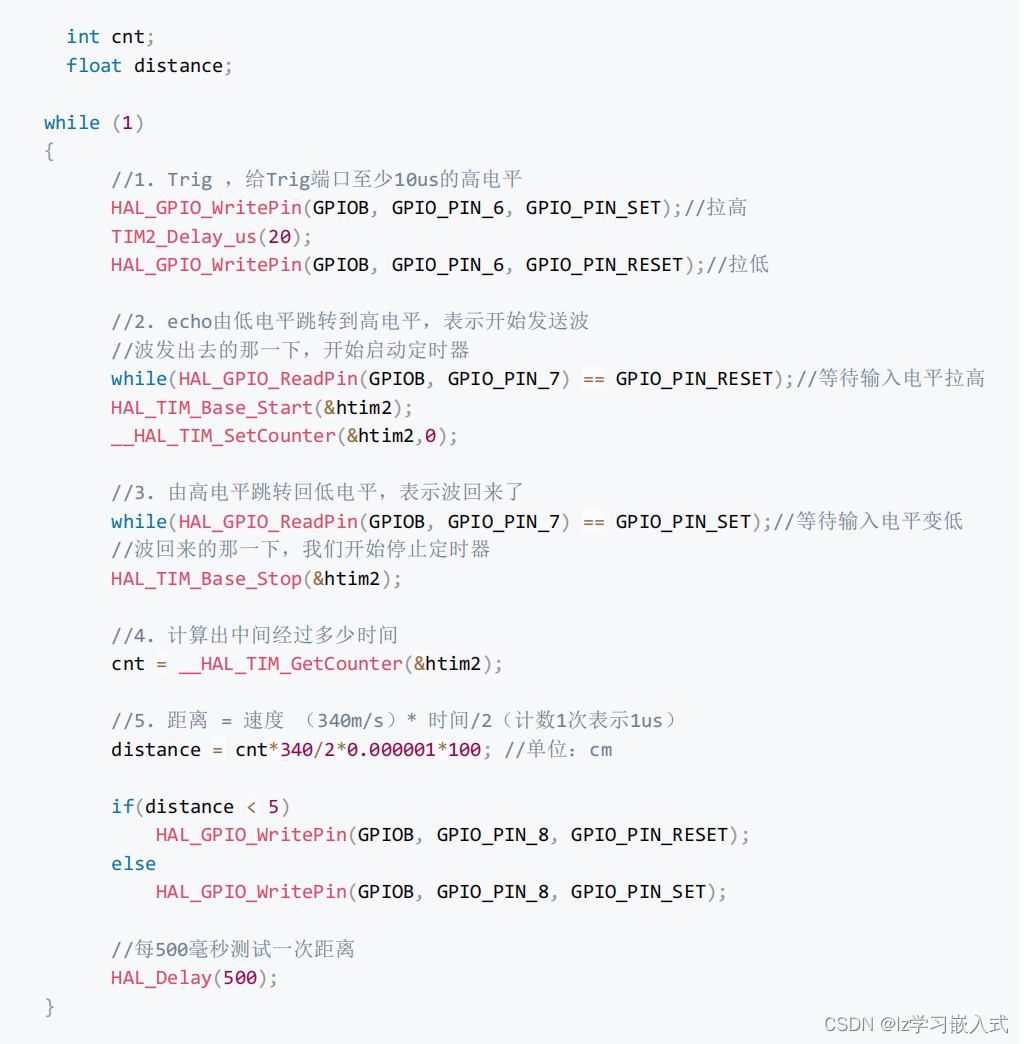
主函数:
1、__HAL_TIM_ENABLE(&htim2);和HAL_TIM_Base_Start(&htim2);有啥区别?
__HAL_TIM_ENABLE(&htim2) 和 HAL_TIM_Base_Start(&htim2) 都是用于启动定时器 TIM2 的函数,但是它们在调用的时候可能存在一些微妙的区别。
-
__HAL_TIM_ENABLE(&htim2):- 这是一个宏,通常在 HAL 库中用于启用定时器。
- 它可能直接设置定时器的控制寄存器中的相应位,使定时器开始计数。
- 在 HAL 库中,这个宏可能执行一些底层的配置操作,以确保定时器正常工作。
-
HAL_TIM_Base_Start(&htim2):- 这是 HAL 库中的一个函数,用于启动定时器。
- 这个函数可能执行一系列初始化步骤,包括设置定时器的模式、分频因子等。
- 与
__HAL_TIM_ENABLE不同,HAL_TIM_Base_Start是一个函数调用,而不是宏,因此它可能包含一些更复杂的逻辑。
在很多情况下,这两者可以互换使用,因为在 HAL 库中,__HAL_TIM_ENABLE 实际上调用了 HAL_TIM_Base_Start。然而,如果你要使用底层的 HAL 库以外的特定功能,可能需要查看它们的具体实现以了解更多细节。
总的来说,如果你在使用 STM32 的 HAL 库,并且只是简单地启动定时器,这两者可能没有太大的区别。在更复杂的应用中,可能需要查看具体的 HAL 库文档或源代码以了解更多信息。
2、?__HAL_TIM_SetCounter(&htim2, 0);
__HAL_TIM_SetCounter(&htim2, 0); 是一个用于设置定时器计数器初值的宏。在这里,htim2 表示 TIM2 定时器的配置。
这行代码的作用是将 TIM2 的计数器的值设置为0。通常在测距应用中,当开始测量 Echo 信号的时间时,需要先将计数器清零,然后开始计时。这样可以确保你测量的是一个相对的时间,而不是累积的时间。
3、__HAL_TIM_GetCounter(&htim2)
__HAL_TIM_GetCounter(&htim2) 是一个用于获取定时器计数器当前值的宏。在这个上下文中,htim2 是一个结构体或指针,表示 TIM2 定时器的配置。这个宏会读取 TIM2 的计数器寄存器的当前值,并返回该值。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!