【CANoe】CANoe手动发送XCP报文读取观测量
2023-12-13 21:01:18
1、硬件连接:配置CANoe的CAN端口,连接到ECU标定对应的CAN口
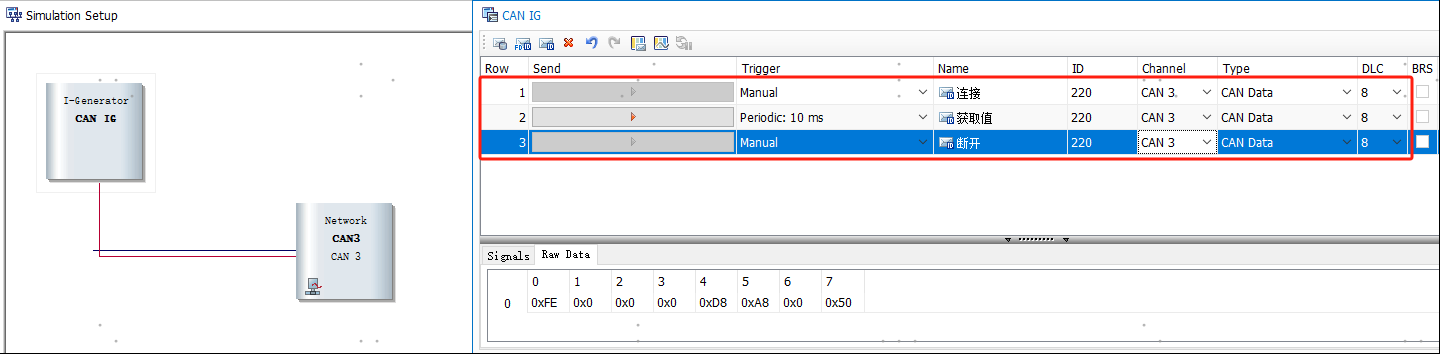
2、配置CAN IG模块报文:连接XCP,读取观测量,断开XCP
分别配置字节内容如下:
连接:0xFF 0x00 0x00 0x00 0x00 0x00 0x00 0x00
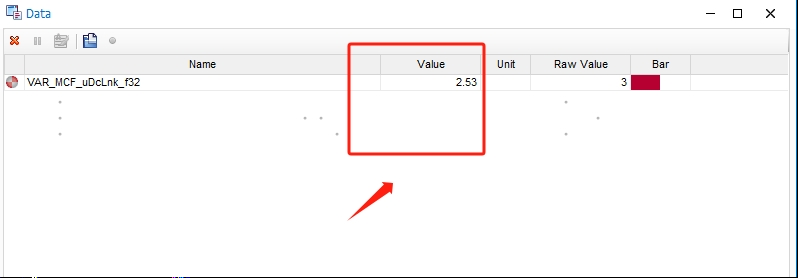
获取值:0xF4 0x04 0x00 0x00 0xD8 0xA8 0x00 0x50
断开:0xFE 0x00 0x00 0x00 0x00 0x00 0x00 0x00
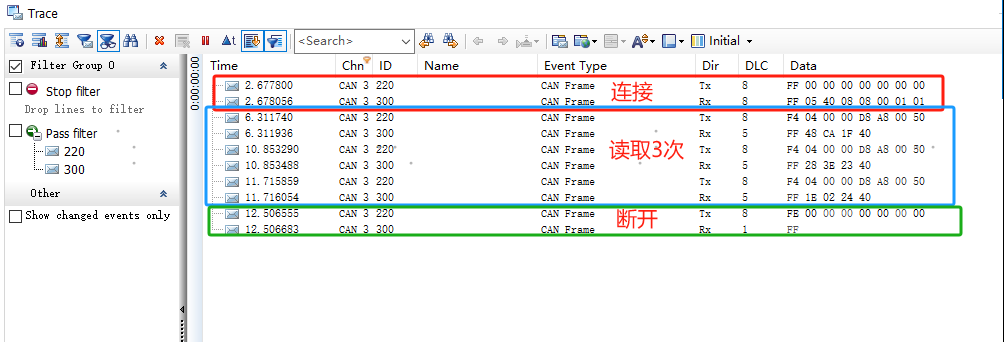
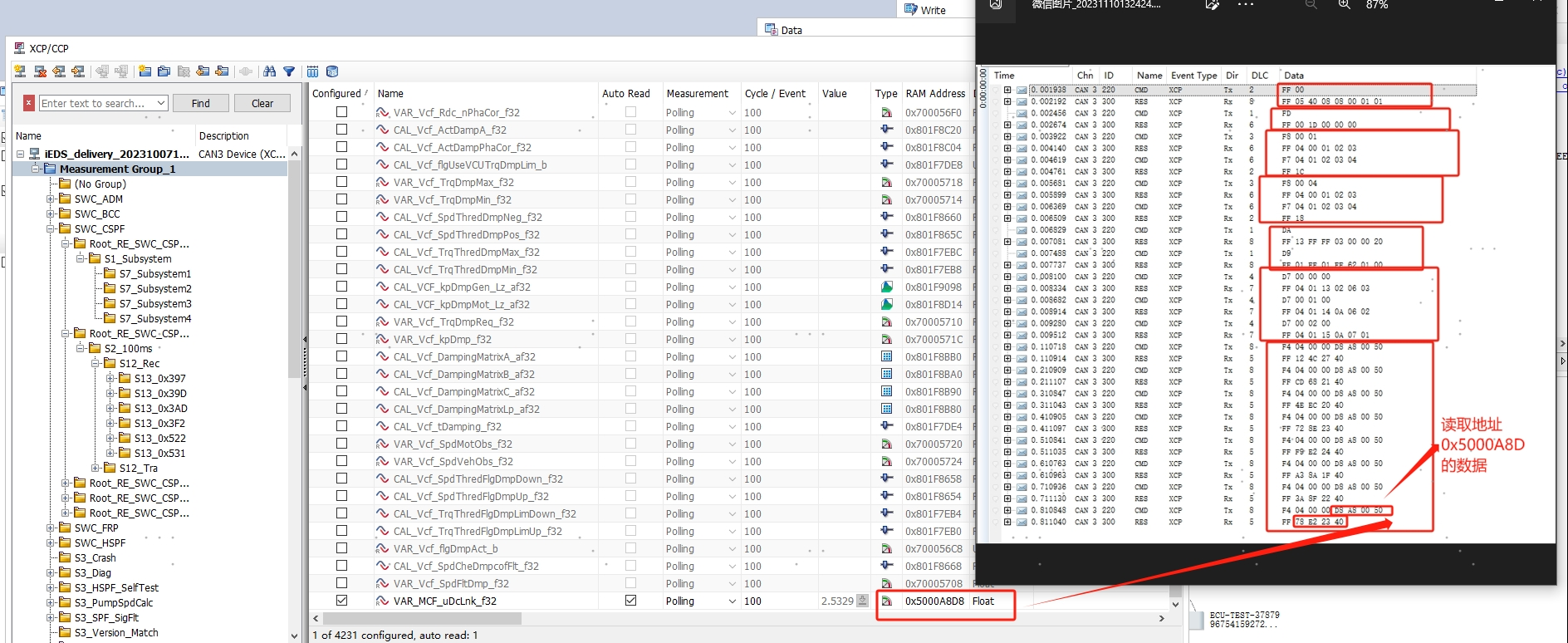
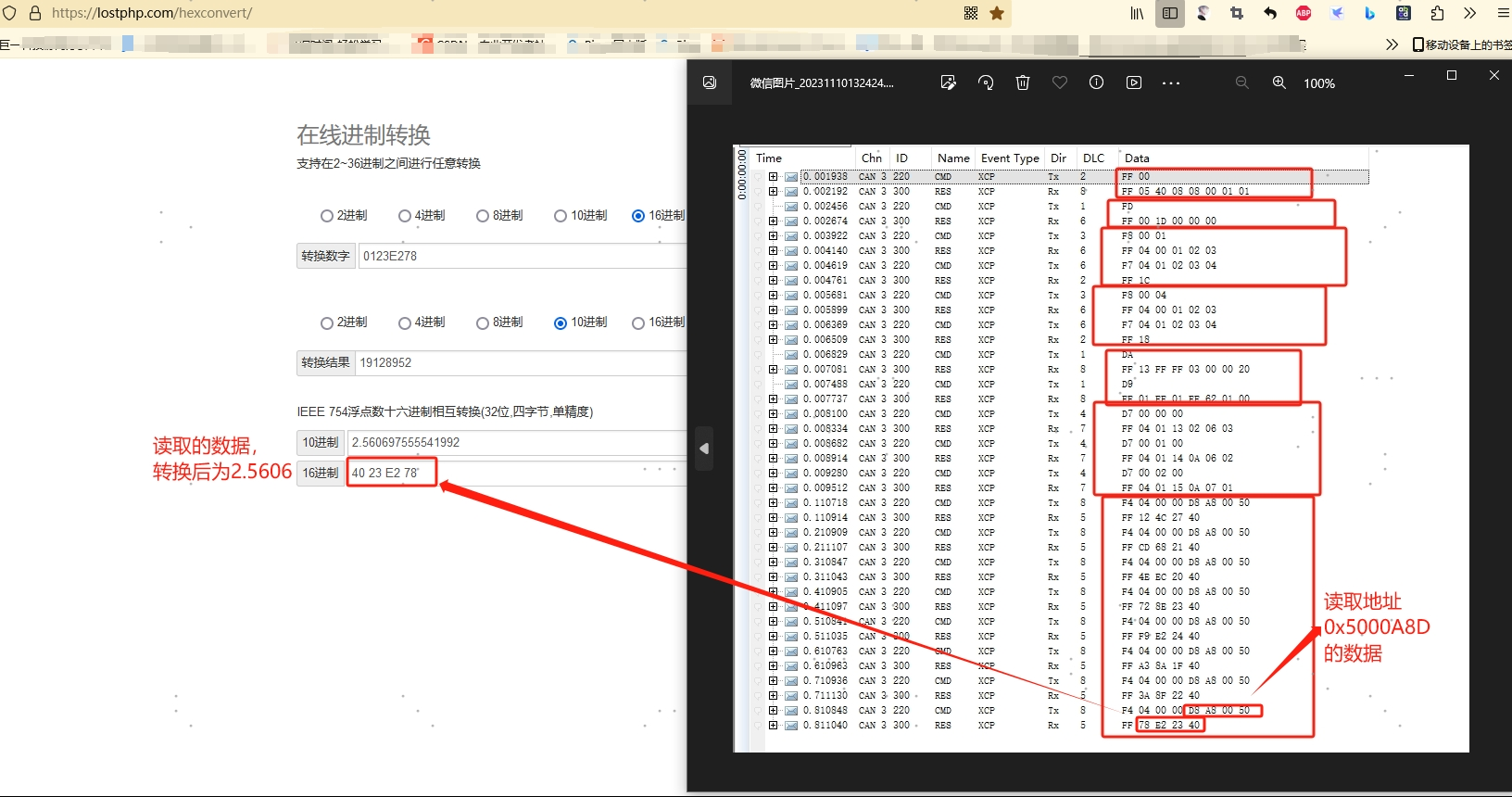
3、报文解析
4、参考资料
https://blog.csdn.net/weixin_42490937/article/details/127659694
XCP协议有几种工作模式,我们可以采用其中的标准模式,即问答模式,Master发出需求指令,Slave进行响应,如下图所示是XCP协议标准模式的基本原理:
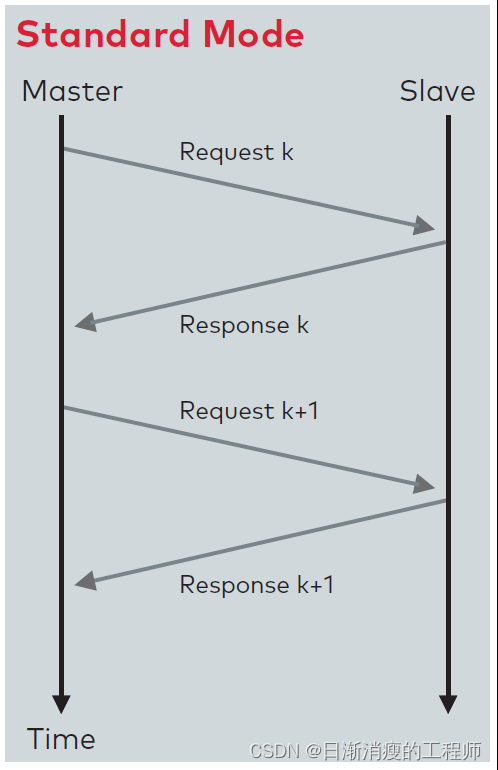
简单描述一下步骤:
1、 MASTER命令Slave建立连接
2、MASTER命令Slave上报某一地址上的值
3、MASTER命令断开ECU连接
标准的XCP功能码(PID)清单如下:
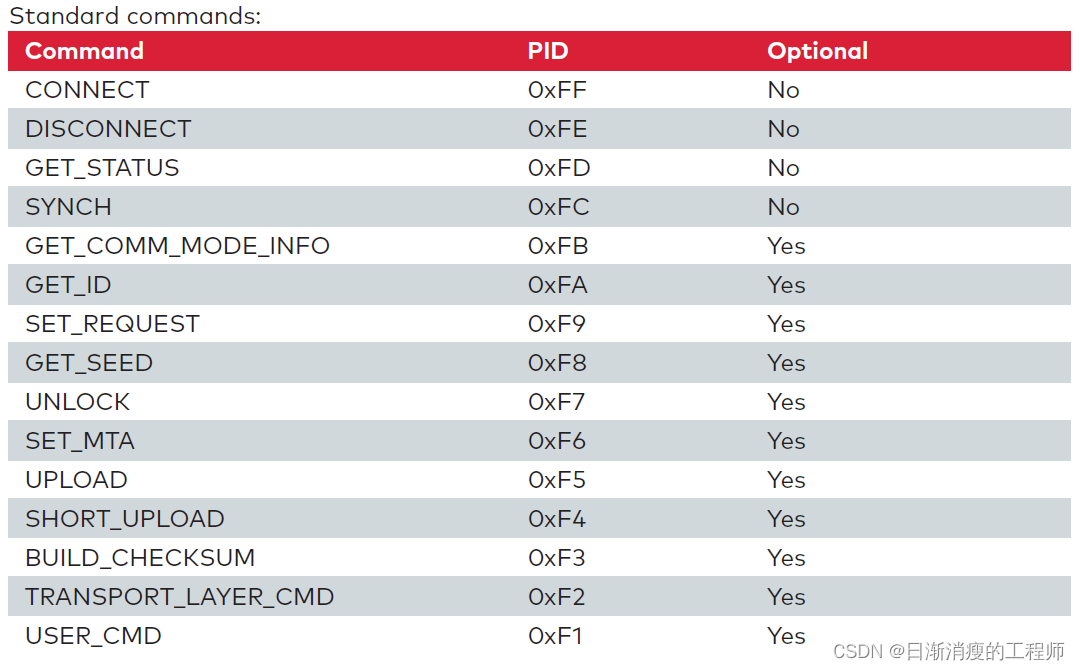
XCP协议标准功能码整个过程中,我们会用到0xFF, 0xF4, 0xFE三个PID。
文章来源:https://blog.csdn.net/sinat_40003796/article/details/134972005
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!