【ROS2】MOMO的鱼香ROS2(五)ROS2入门篇——ROS2接口与自定义
ROS2接口与自定义
引言
笔者跟着鱼香ROS的ROS2学习之旅
学习参考:
【ROS2机器人入门到实战】
笔者的学习目录
- MOMO的鱼香ROS2(一)ROS2入门篇——从Ubuntu操作系统开启
- MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
- MOMO的鱼香ROS2(三)ROS2入门篇——ROS2第一个节点
- MOMO的鱼香ROS2(四)ROS2入门篇——ROS2节点通信之话题与服务
1 ROS2自带接口
接口其实是一种规范
1.1 ROS2通用标准消息包
ros2 interface package std_msgs
std_msgs/msg/String
std_msgs/msg/ByteMultiArray
std_msgs/msg/UInt16
std_msgs/msg/UInt64
std_msgs/msg/UInt8
std_msgs/msg/Int64MultiArray
std_msgs/msg/UInt32MultiArray
std_msgs/msg/UInt16MultiArray
std_msgs/msg/Float32MultiArray
std_msgs/msg/MultiArrayDimension
std_msgs/msg/Float64MultiArray
std_msgs/msg/Int8
std_msgs/msg/Byte
std_msgs/msg/Bool
std_msgs/msg/Int32
std_msgs/msg/Int16
std_msgs/msg/Float64
std_msgs/msg/Header
std_msgs/msg/Char
std_msgs/msg/Int64
std_msgs/msg/MultiArrayLayout
std_msgs/msg/Int16MultiArray
std_msgs/msg/Float32
std_msgs/msg/UInt64MultiArray
std_msgs/msg/UInt8MultiArray
std_msgs/msg/Int8MultiArray
std_msgs/msg/Int32MultiArray
std_msgs/msg/UInt32
std_msgs/msg/ColorRGBA
std_msgs/msg/Empty
以下是一些 std_msgs 中的常见消息类型:
Header: 包含 ROS 消息的标准头部信息,如时间戳和坐标系。
uint32 seq
time stamp
string frame_id
String: 代表字符串。
string data
Bool: 代表布尔值。
bool data
Int8, Int16, Int32, Int64: 代表有符号整数,分别为 8 位、16 位、32 位和 64 位。
int8 data
int16 data
int32 data
int64 data
UInt8, UInt16, UInt32, UInt64: 代表无符号整数,分别为 8 位、16 位、32 位和 64 位。
uint8 data
uint16 data
uint32 data
uint64 data
Float32, Float64: 代表单精度和双精度浮点数。
float32 data
float64 data
这些消息类型可以广泛应用于 ROS 中的不同节点,用于传递基本的数据信息。例如,一个节点可以发布一个包含测量值的 Float32 消息,而另一个节点可以订阅这个消息以获取测量值。
1.2 ROS2传感器消息包
ros2 interface package sensor_msgs
sensor_msgs/msg/PointCloud
sensor_msgs/msg/CompressedImage
sensor_msgs/msg/Image
sensor_msgs/msg/PointField
sensor_msgs/msg/LaserEcho
sensor_msgs/msg/BatteryState
sensor_msgs/msg/MultiDOFJointState
sensor_msgs/msg/NavSatFix
sensor_msgs/msg/Joy
sensor_msgs/msg/MultiEchoLaserScan
sensor_msgs/msg/LaserScan
sensor_msgs/msg/JoyFeedbackArray
sensor_msgs/msg/MagneticField
sensor_msgs/msg/ChannelFloat32
sensor_msgs/msg/RegionOfInterest
sensor_msgs/msg/NavSatStatus
sensor_msgs/msg/Range
sensor_msgs/msg/Illuminance
sensor_msgs/msg/RelativeHumidity
sensor_msgs/msg/Temperature
sensor_msgs/msg/FluidPressure
sensor_msgs/msg/JointState
sensor_msgs/srv/SetCameraInfo
sensor_msgs/msg/Imu
sensor_msgs/msg/CameraInfo
sensor_msgs/msg/JoyFeedback
sensor_msgs/msg/TimeReference
sensor_msgs/msg/PointCloud2
以下是 sensor_msgs 中的一些常见消息类型:
Image: 用于传递图像数据,包括图像的像素数据、编码格式、时间戳等。
Header header
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
CameraInfo: 包含相机的信息,如相机矩阵、畸变参数等。
Header header
uint32 height
uint32 width
string distortion_model
float64[] D
float64[] K
float64[] R
float64[] P
uint32[] binning_x
uint32[] binning_y
sensor_msgs/RegionOfInterest roi
PointCloud2: 用于传递点云数据,包括点的坐标、颜色等信息。
Header header
bool is_dense
string[] fields
uint8 INT8 = 1
uint8 UINT8 = 2
uint8 INT16 = 3
uint8 UINT16 = 4
uint8 INT32 = 5
uint8 UINT32 = 6
uint8 FLOAT32 = 7
uint8 FLOAT64 = 8
uint8 point_step
uint8[] data
uint32 row_step
uint32 width
uint32 height
sensor_msgs/PointField[] fields
bool is_bigendian
uint32 point_step
uint32 row_step
uint32 data_length
uint8[] data
LaserScan: 用于传递激光扫描数据。
Header header
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
IMU:惯性测量单元的方向、角速度和线性加速度
Header header
geometry_msgs/Quaternion orientation
float64[9] orientation_covariance
geometry_msgs/Vector3 angular_velocity
float64[9] angular_velocity_covariance
geometry_msgs/Vector3 linear_acceleration
float64[9] linear_acceleration_covariance
header: 用于包含时间戳等信息的标准 ROS 消息头。
orientation: 包含四元数表示的方向。
orientation_covariance: 一个长度为 9 的数组,表示方向协方差矩阵。
angular_velocity: 包含角速度信息的三维向量。
angular_velocity_covariance: 一个长度为 9 的数组,表示角速度协方差矩阵。
linear_acceleration: 包含线性加速度信息的三维向量。
linear_acceleration_covariance: 一个长度为 9 的数组,表示线性加速度协方差矩阵。
这些消息类型可以用于在 ROS 系统中传递从各种传感器获得的数据。节点可以发布这些消息,而其他节点则可以订阅它们以获取传感器数据。
1.3 ROS2几何相关消息包
ros2 interface package geometry_msgs
geometry_msgs/msg/Quaternion
geometry_msgs/msg/WrenchStamped
geometry_msgs/msg/Point32
geometry_msgs/msg/Accel
geometry_msgs/msg/Pose
geometry_msgs/msg/Vector3
geometry_msgs/msg/PoseArray
geometry_msgs/msg/PoseWithCovarianceStamped
geometry_msgs/msg/Polygon
geometry_msgs/msg/AccelWithCovarianceStamped
geometry_msgs/msg/AccelStamped
geometry_msgs/msg/PoseWithCovariance
geometry_msgs/msg/TransformStamped
geometry_msgs/msg/PointStamped
geometry_msgs/msg/PolygonStamped
geometry_msgs/msg/Vector3Stamped
geometry_msgs/msg/Inertia
geometry_msgs/msg/Wrench
geometry_msgs/msg/AccelWithCovariance
geometry_msgs/msg/Pose2D
geometry_msgs/msg/InertiaStamped
geometry_msgs/msg/PoseStamped
geometry_msgs/msg/QuaternionStamped
geometry_msgs/msg/Transform
geometry_msgs/msg/Twist
geometry_msgs/msg/TwistStamped
geometry_msgs/msg/TwistWithCovarianceStamped
geometry_msgs/msg/TwistWithCovariance
geometry_msgs/msg/Point
以下是一些常见的 geometry_msgs 中的消息类型:
Point: 代表三维空间中的点。
float64 x
float64 y
float64 z
Quaternion: 代表四元数,通常用于表示旋转。
float64 x
float64 y
float64 z
float64 w
Pose: 代表包含位置和方向的位姿。
Point position
Quaternion orientation
Transform: 代表变换矩阵。
Vector3 translation
Quaternion rotation
这些消息类型可以用于 ROS 中的各种应用,例如机器人运动、感知、导航等。通过使用这些消息,ROS 中的不同节点可以相互通信,共享几何信息,从而实现协同工作。
2 ROS2接口介绍
2.1 常用CLI命令
查看接口列表
ros2 interface list
查看某一个接口详细的内容
ros2 interface show std_msgs/msg/String
2.2 原始数据类型与包装类型
基本数据类型,每一个都可以在后面加上[]将其变成数组形式(从一个变成多个)
bool
byte
char
float32, float64
int8, uint8
int16, uint16
int32, uint32
int64, uint64
string
对数据类型进行剥洋葱
ros2 interface show sensor_msgs/msg/Image
终端显示如下:
# This message contains an uncompressed image
# (0, 0) is at top-left corner of image
std_msgs/Header header # Header timestamp should be acquisition time of image
uint32 height # image height, that is, number of rows
uint32 width # image width, that is, number of columns
string encoding # Encoding of pixels -- channel meaning, ordering, size
uint8 is_bigendian # is this data bigendian?
uint32 step # Full row length in bytes
uint8[] data # actual matrix data, size is (step * rows)
对非基类的数据数据类型std_msgs/Header header进行剥洋葱
ros2 interface show std_msgs/msg/Header
终端显示如下:
# Two-integer timestamp that is expressed as seconds and nanoseconds.
builtin_interfaces/Time stamp
# Transform frame with which this data is associated.
string frame_id
对非基类的数据数据类型builtin_interfaces/Time进行剥洋葱
ros2 interface show builtin_interfaces/msg/Time
终端显示如下:
int32 sec
uint32 nanosec
最后只剩下基类了
3 自定义接口示例
说明:这部分笔者主要是将鱼香ROS2的示例成功跑通,具体流程如下:
示例链接:
3.1 接口定义
1.创建接口功能包
ros2 pkg create alian_ros2_interfaces --build-type ament_cmake --dependencies rosidl_default_generators geometry_msgs
注意功能包类型必须为:ament_cmake
依赖rosidl_default_generators:用于生成ROS中的消息、服务和行为的代码。ROS中的消息和服务是通过IDL(接口定义语言)描述的,而rosidl_default_generators
则负责将这些IDL文件转换为各种编程语言的实际代码。
具体来说,rosidl_default_generators 支持将ROS接口定义语言(ROS
IDL)文件转换为C、C++等语言的源代码。这包括生成用于发布/订阅消息、提供/调用服务以及执行行为所需的代码。
2.编写接口脚本文件
接着创建文件夹(msg、srv)和文件(RobotPose.msg、RobotStatus.msg、MoveRobot.srv),如下图。
.
├── CMakeLists.txt
├── msg
│ ├── RobotPose.msg
│ └── RobotStatus.msg
├── package.xml
└── srv
└── MoveRobot.srv
2 directories, 5 files
RobotPose.msg
uint32 STATUS_MOVEING = 1
uint32 STATUS_STOP = 2
uint32 status
geometry_msgs/Pose pose
RobotStatus.msg
uint32 STATUS_MOVEING = 1
uint32 STATUS_STOP = 1
uint32 status
float32 pose
MoveRobot.srv
# 前进后退的距离
float32 distance
---
# 当前的位置
float32 pose
3.设置配置文件
CMakeLists.txt
find_package(rosidl_default_generators REQUIRED)
find_package(geometry_msgs REQUIRED)
# 添加下面的内容
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/RobotPose.msg"
"msg/RobotStatus.msg"
"srv/MoveRobot.srv"
DEPENDENCIES geometry_msgs
)
package.xml
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rosidl_default_generators</depend>
<depend>geometry_msgs</depend>
<member_of_group>rosidl_interface_packages</member_of_group> #添加这一行
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
4.编译接口功能包
colcon build --packages-select example_ros2_interfaces
3.2 自定义接口RCLPY
1.创建功能包和节点
cd colcon_ws/ # 自定义的工作空间
ros2 pkg create example_interfaces_rclpy --build-type ament_python --dependencies rclpy example_ros2_interfaces --destination-directory src --node-name example_interfaces_robot_02
touch src/example_interfaces_rclpy/example_interfaces_rclpy/example_interfaces_control_02.py
2. 编写节点脚本
example_interfaces_robot_02.py
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from example_ros2_interfaces.msg import RobotStatus
import math
from time import sleep
from example_ros2_interfaces.srv import MoveRobot
class Robot():
def __init__(self) -> None:
self.current_pose_ = 0.0
self.target_pose_ = 0.0
self.status_ = RobotStatus.STATUS_STOP
def get_status(self):
return self.status_
def get_current_pose(self):
return self.current_pose_
def move_distance(self,distance):
self.status_ = RobotStatus.STATUS_MOVEING # 更新状态为移动、
self.target_pose_ += distance # 更新目标位置
while math.fabs(self.target_pose_ - self.current_pose_) > 0.01:
step = distance / math.fabs(distance) * math.fabs(self.target_pose_ - self.current_pose_) * 0.1 # 计算一步移动距离
self.current_pose_ += step # 移动一步
print(f"移动了:{step}当前位置:{self.current_pose_}")
sleep(0.5) #休息0.5s
self.status_ = RobotStatus.STATUS_STOP # 更新状态为停止
return self.current_pose_
class ExampleInterfacesRobot02(Node):
def __init__(self,name):
super().__init__(name)
self.get_logger().info("节点已启动:%s!" % name)
self.robot = Robot()
self.move_robot_server_ = self.create_service(MoveRobot,"move_robot", self.handle_move_robot)
self.robot_status_publisher_ = self.create_publisher(RobotStatus,"robot_status", 10)
self.publisher_timer_ = self.create_timer(0.5, self.publisher_timer_callback)
def publisher_timer_callback(self):
"""
定时器回调发布数据函数
"""
msg = RobotStatus() #构造消息
msg.status = self.robot.get_status()
msg.pose = self.robot.get_current_pose()
self.robot_status_publisher_.publish(msg) # 发布消息
self.get_logger().info(f'发布了当前的状态:{msg.status} 位置:{msg.pose}')
def handle_move_robot(self,request, response):
self.robot.move_distance(request.distance)
response.pose = self.robot.get_current_pose()
return response
def main(args=None):
rclpy.init(args=args) # 初始化rclpy
node = ExampleInterfacesRobot02("example_interfaces_robot_02") # 新建一个节点
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
example_interfaces_control_02.py
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from example_ros2_interfaces.msg import RobotStatus
from example_ros2_interfaces.srv import MoveRobot
class ExampleInterfacesControl02(Node):
def __init__(self,name):
super().__init__(name)
self.get_logger().info("节点已启动:%s!" % name)
self.client_ = self.create_client(MoveRobot,"move_robot")
self.robot_status_subscribe_ = self.create_subscription(RobotStatus,"robot_status",self.robot_status_callback,10)
def robot_status_callback(self,msg):
self.get_logger().info(f"收到状态数据位置:{msg.pose} 状态:{msg.status}")
def move_result_callback_(self, result_future):
response = result_future.result()
self.get_logger().info(f"收到返回结果:{response.pose}")
def move_robot(self, distance):
while rclpy.ok() and self.client_.wait_for_service(1)==False:
self.get_logger().info(f"等待服务端上线....")
request = MoveRobot.Request()
request.distance = distance
self.get_logger().info(f"请求服务让机器人移动{distance}")
self.client_.call_async(request).add_done_callback(self.move_result_callback_)
def main(args=None):
rclpy.init(args=args) # 初始化rclpy
node = ExampleInterfacesControl02("example_interfaces_control_02") # 新建一个节点
node.move_robot(5.0) #移动5米
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
3.修改配置文件setup.py
entry_points={
'console_scripts': [
'example_interfaces_control_02 = example_interfaces_rclpy.example_interfaces_control_02:main',
'example_interfaces_robot_02 = example_interfaces_rclpy.example_interfaces_robot_02:main'
],
},
4.编译功能包+运行测试
# 新终端
colcon build --packages-up-to example_interfaces_rclpy
source install/setup.bash
ros2 run example_interfaces_rclpy example_interfaces_robot_02
# 新终端
source install/setup.bash
ros2 run example_interfaces_rclpy example_interfaces_control_02
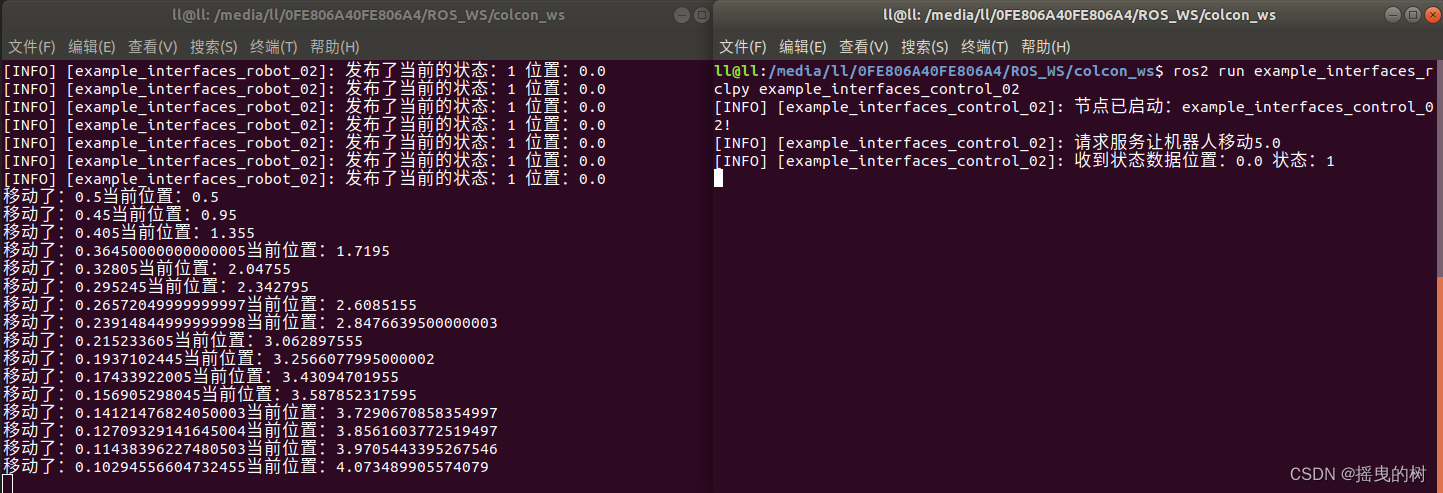
上图则说明自定义接口测试成功!!!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!