数模学习day10-聚类模型
说明,本文部分图片和内容源于数学建模交流公众号
目录
K-means聚类算法
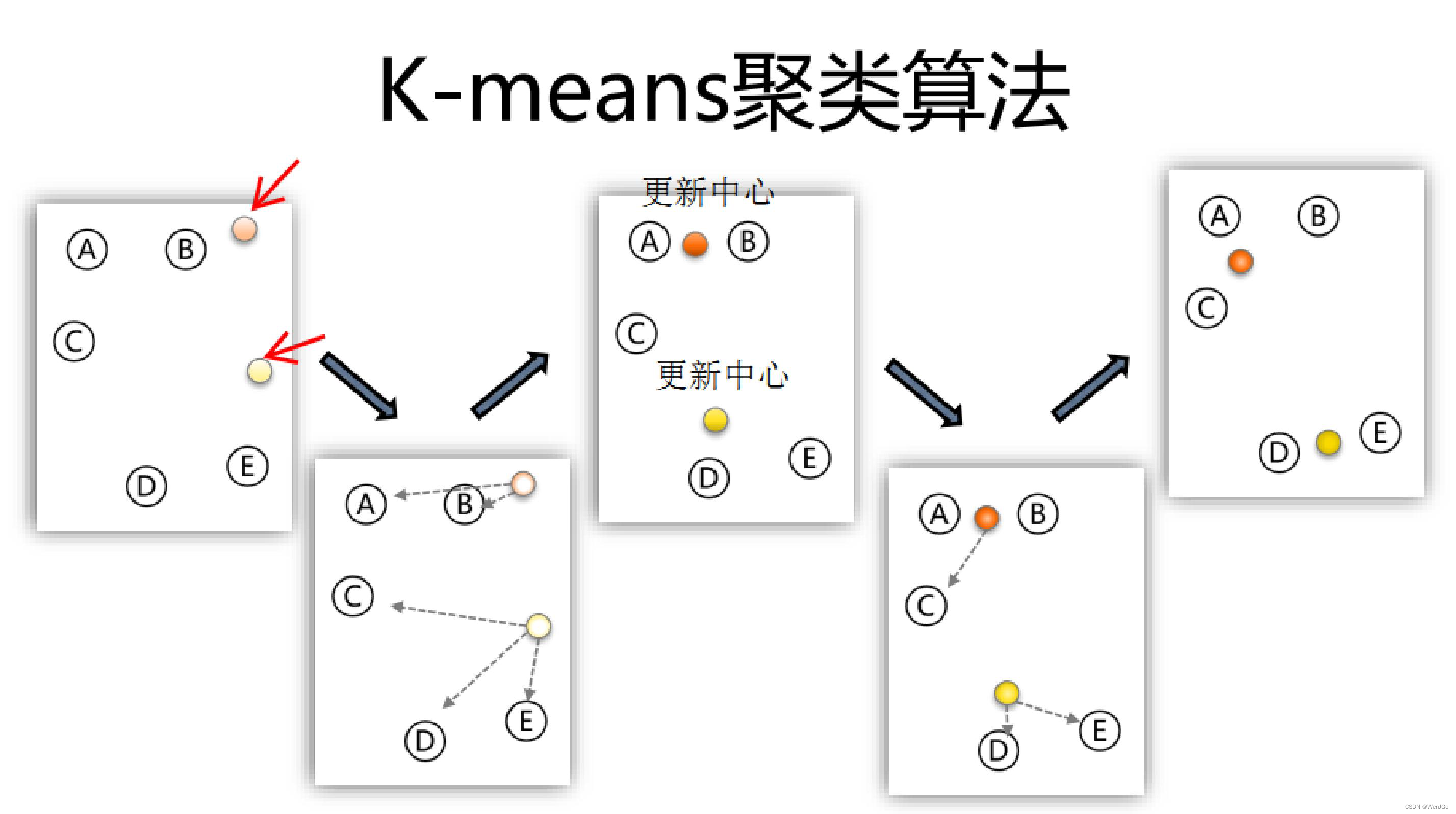
K-means聚类的算法流程:
(1)指定需要划分的簇的个数K值(类的个数)
(2)随机地选择K个数据对象作为初始的聚类中心(不一定要是我们的样本点)
(3)计算其余的各个数据对象到这K个初始聚类中心的距离,把数据对象划归到距离它最近的那个中心所处在的簇类中
(4)调整新类并且重新计算出新类的中心
(5)循环步骤三和四,看中心是否收敛(不变),如果收敛或达到迭代次数则停止循环
(6)结束。GG
图解
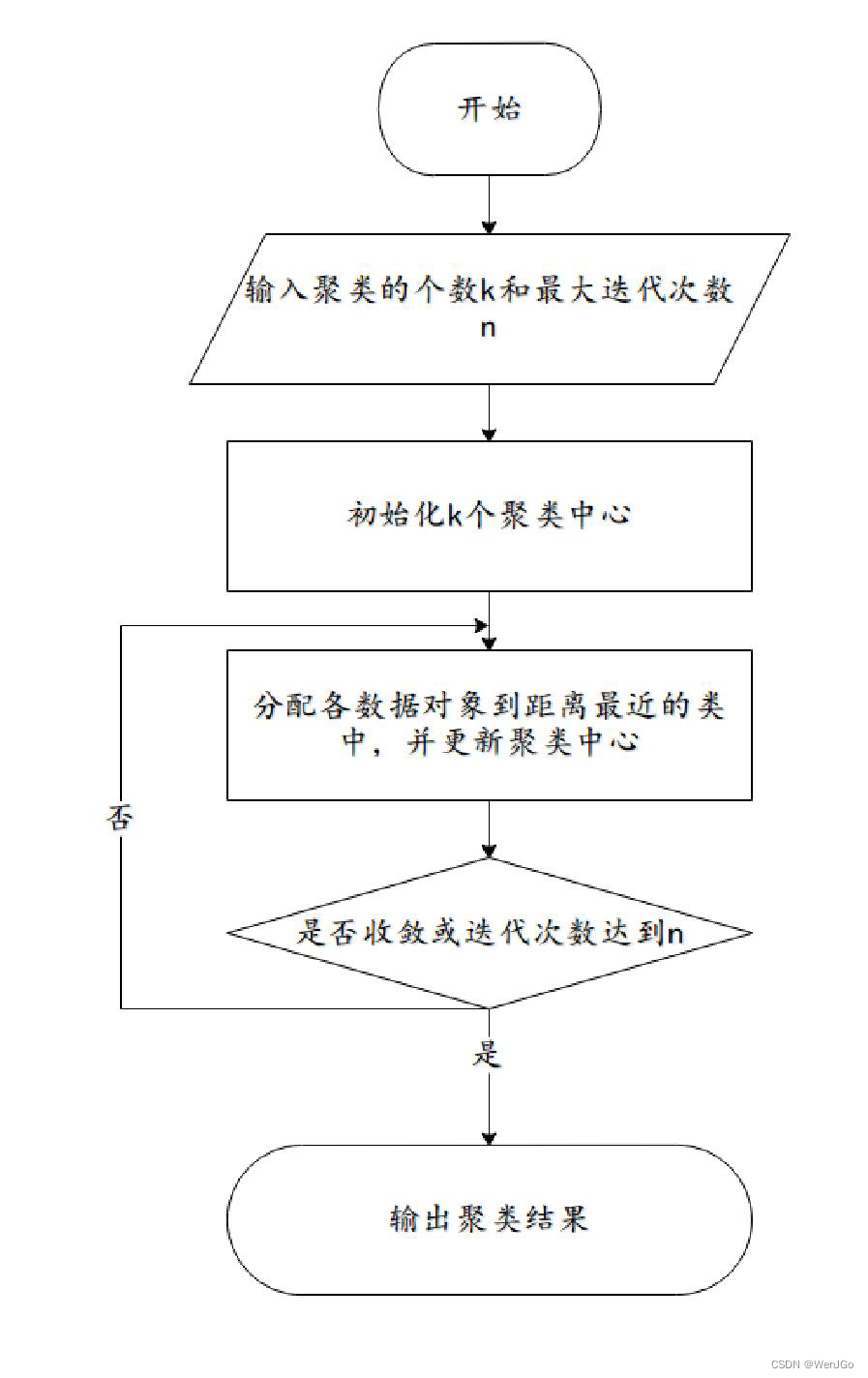
算法流程图
评价
优点:
(1)算法简单、快速。
(2)对处理大数据集,该算法是相对高效率的。
缺点:
(1)要求用户必须事先给出要生成的簇的数目K。
(2)对初值敏感。
(3)对于孤立点数据敏感。
K-means++算法可解决2和3这两个缺点。
K-means++算法
只对K-means算法“初始化K个聚类中心” 这一步进行了优化
基本原则
k-means++算法选择初始聚类中心的基本原则是:
初始的聚类中心之间的相互距离要尽可能的远。
算法过程
(1)随机选取一个样本作为第一个聚类中心;
(2)计算每个样本与当前已有聚类中心的最短距离(即与最近一个聚类中心的距离),这个值越大,表示被选取作为聚类中心的概率较大;最后,用轮盘法(依据概率大小来进行抽选)选出下一个聚类中心;
(3)重复步骤二,直到选出K个聚类中心。选出初始点后,就继续使用标准的K-means算法了。
Spss软件操作
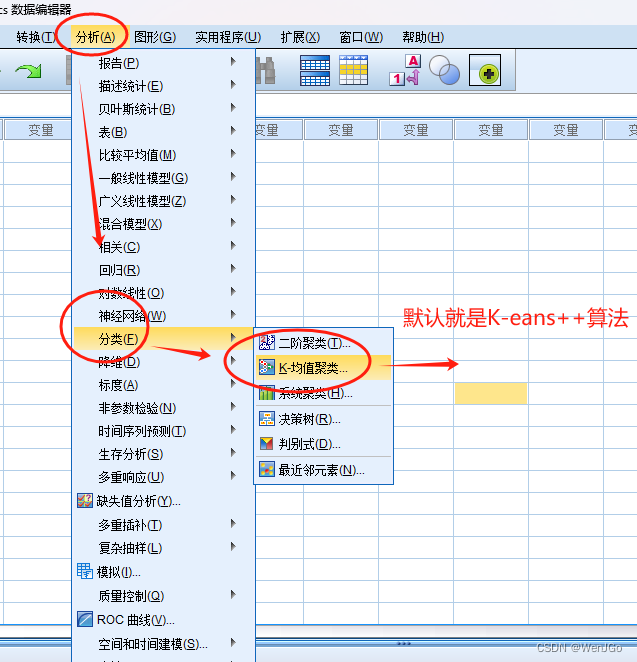

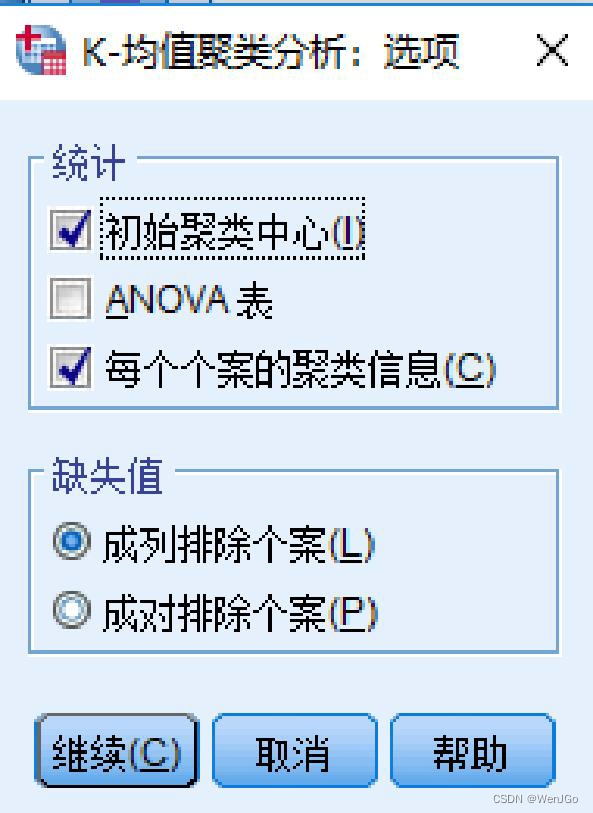
这里简略的提到。
K-means算法的疑惑
(1)聚类的个数K值怎么定?
答:分几类主要取决于个人的经验与感觉,通常的做法是多尝试几个K值,看分成几类的结果更好解释,更符合分析目的等。
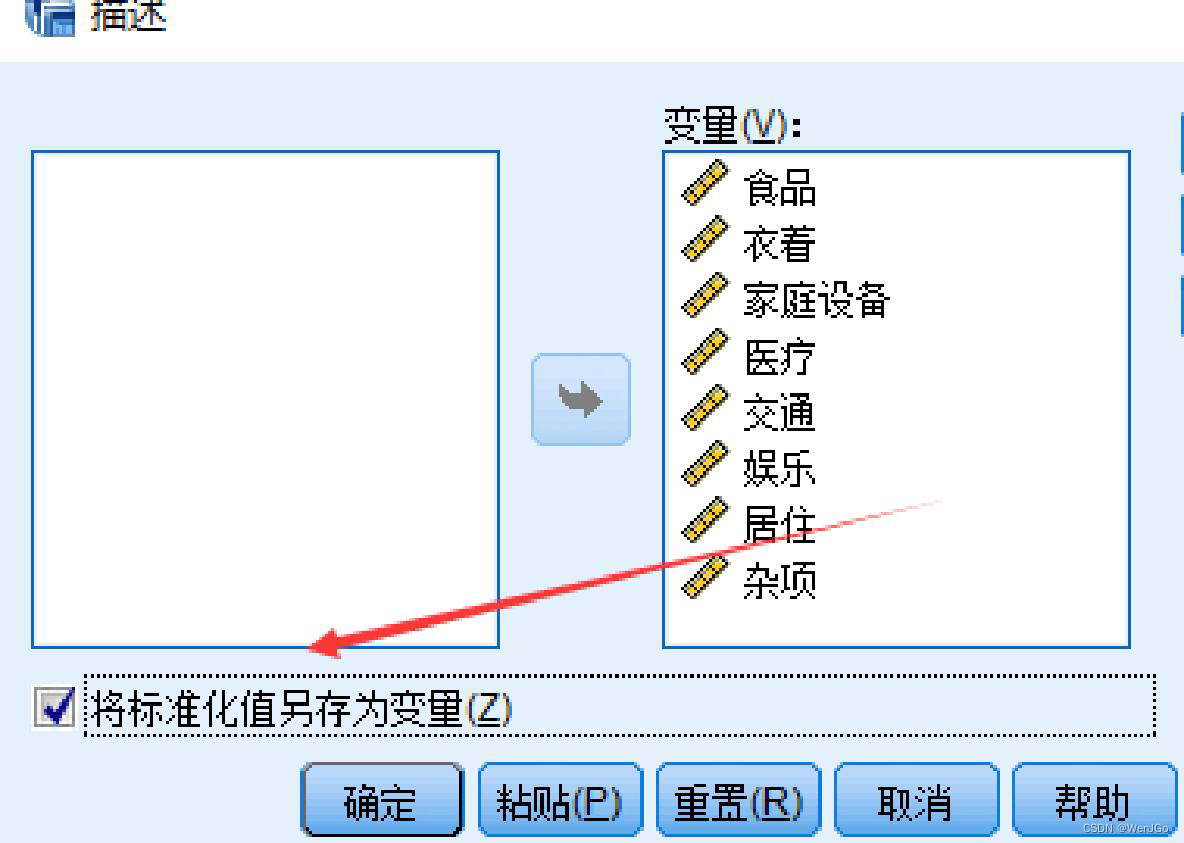
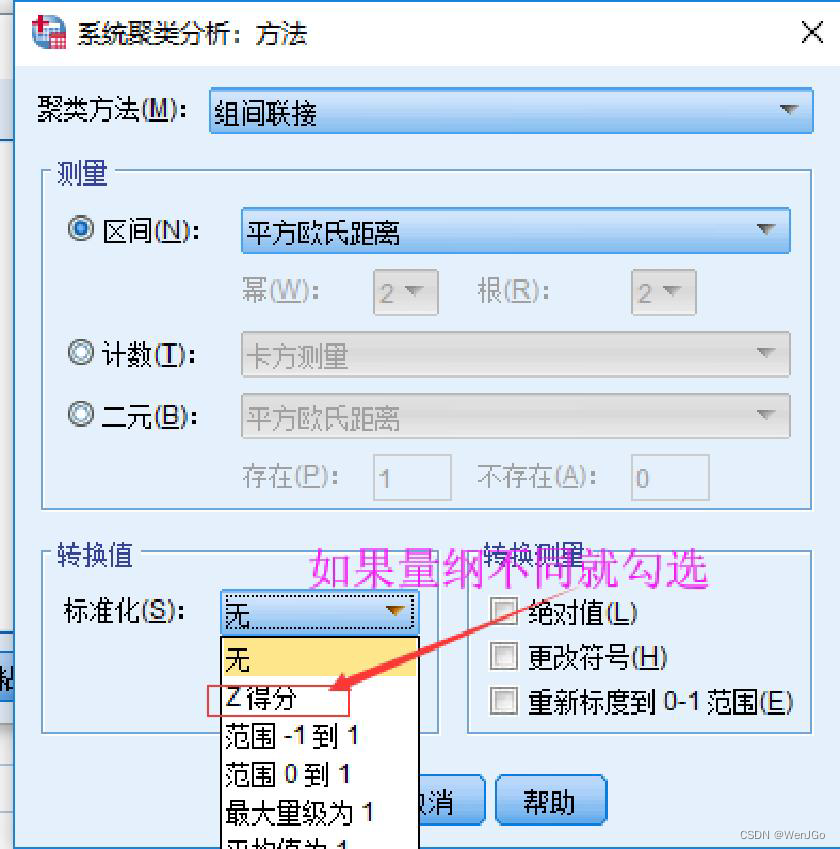
(2)数据的量纲不一致怎么办?
答:如果数据的量纲不一样,那么算距离时就没有意义。例如:如果X1单位是米,X2单位是吨,用距离公式计算就会出现“米的平方”加上“吨的平方”再开平方,最后算出的东西没有数学意义,这就有问题了。


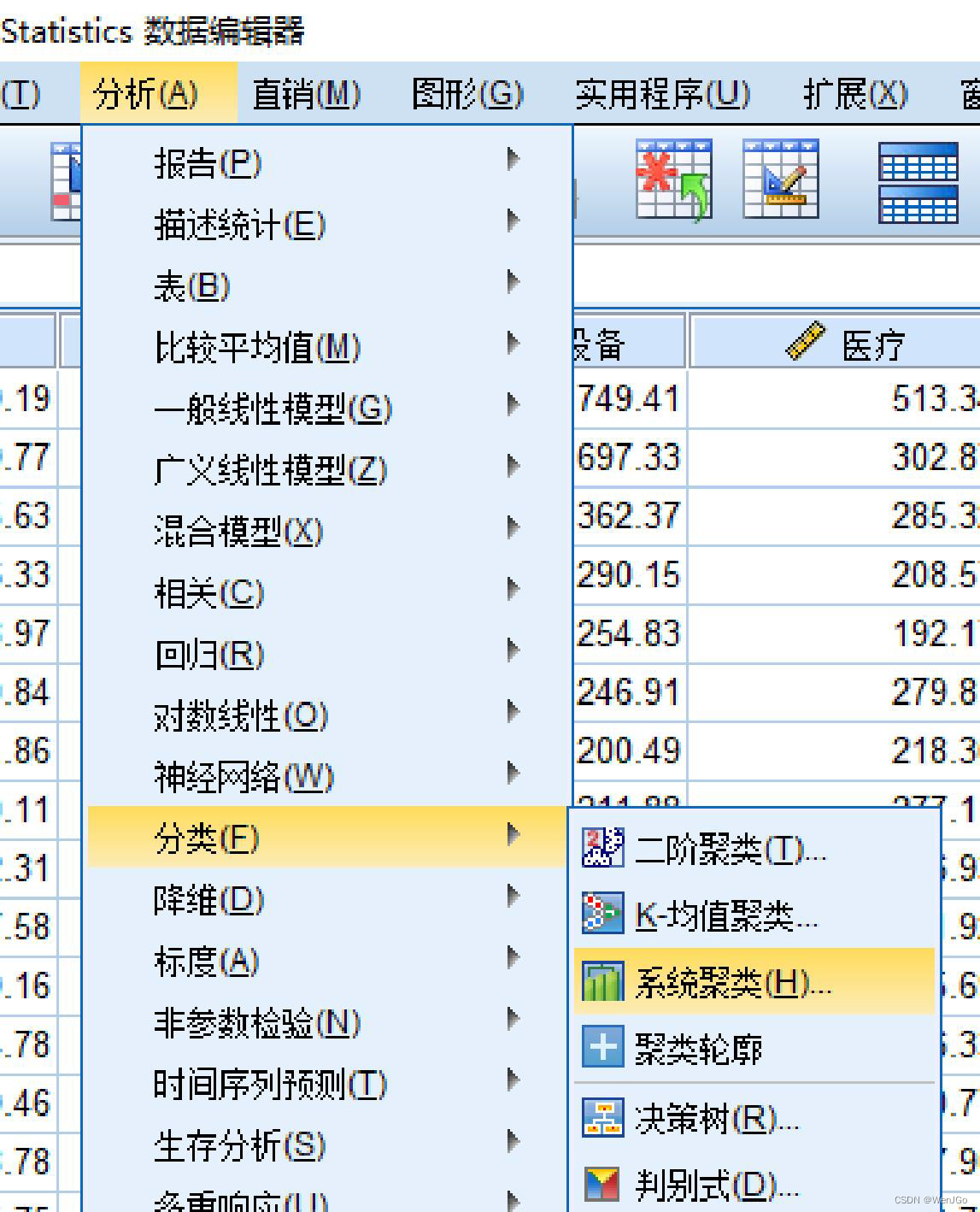
系统(层次)聚类
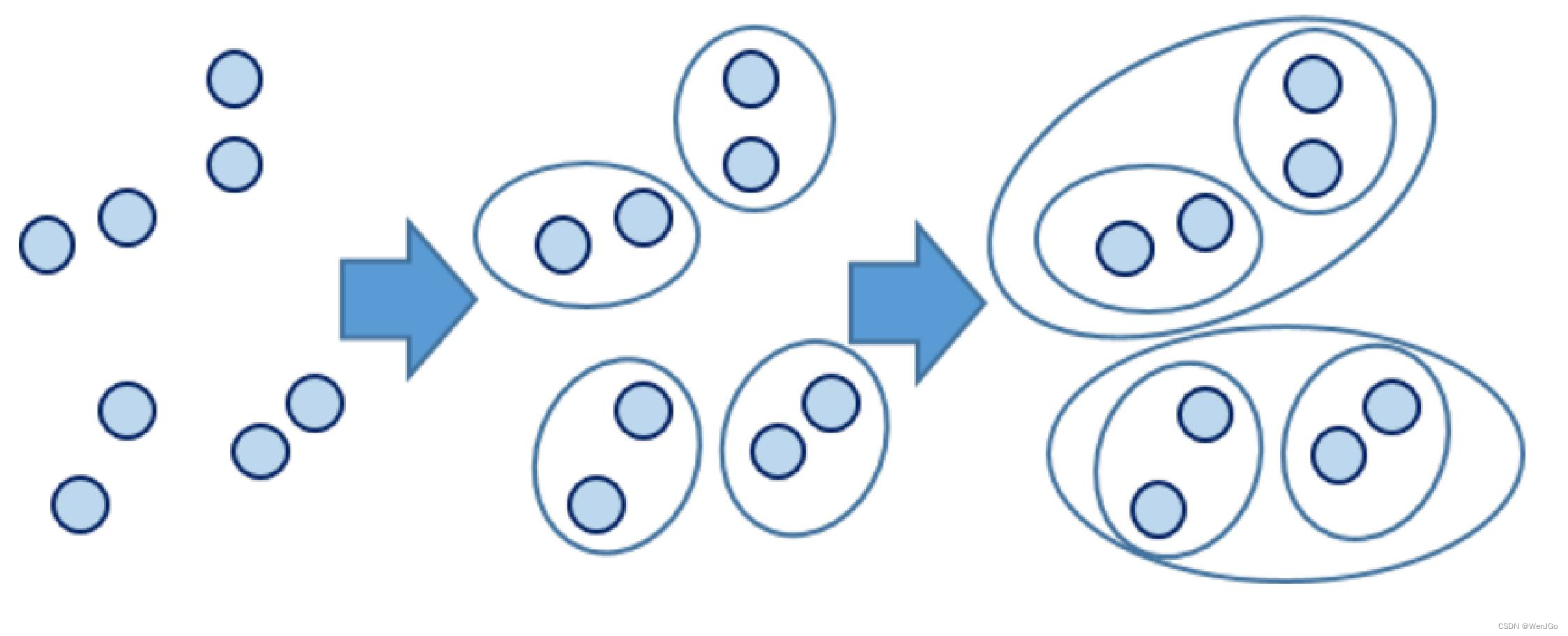
系统聚类的合并算法通过计算两类数据点间的距离,对最为接近的两类数据点进行组合,并反复迭代这一过程,直到将所有数据点合成一类,并生成聚类谱系图。
算法流程
系统(层次)聚类的算法流程:
(1)将每个对象看作一类,计算两两之间的最小距离;
(2)将距离最小的两个类合并成一个新类;
(3)重新计算新类与所有类之间的距离;
(4)重复二三两步,直到所有类最后合并成一类;
(5)结束。
Spss操作

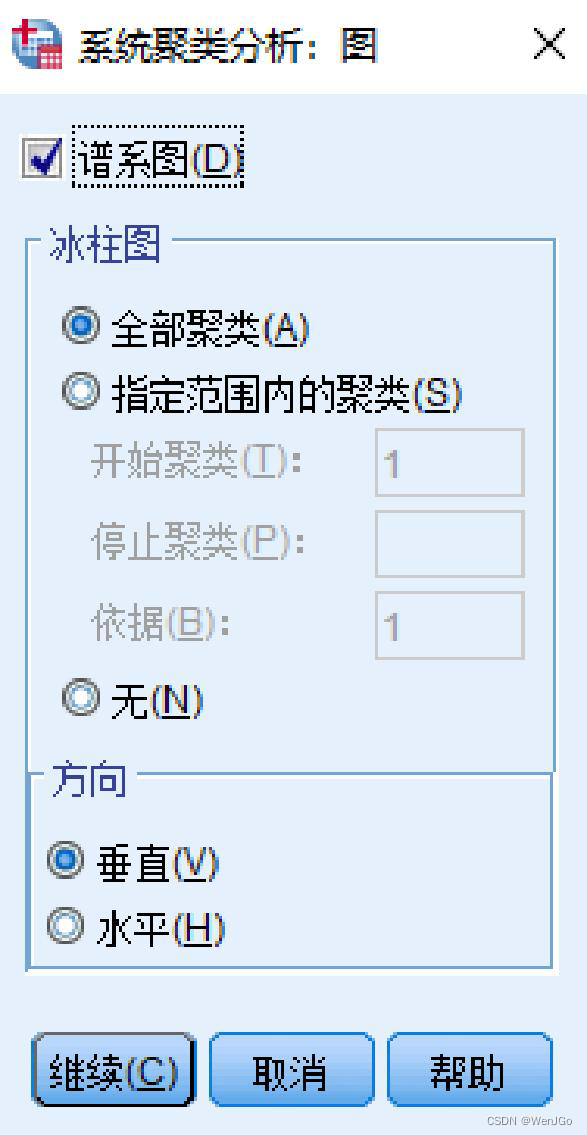
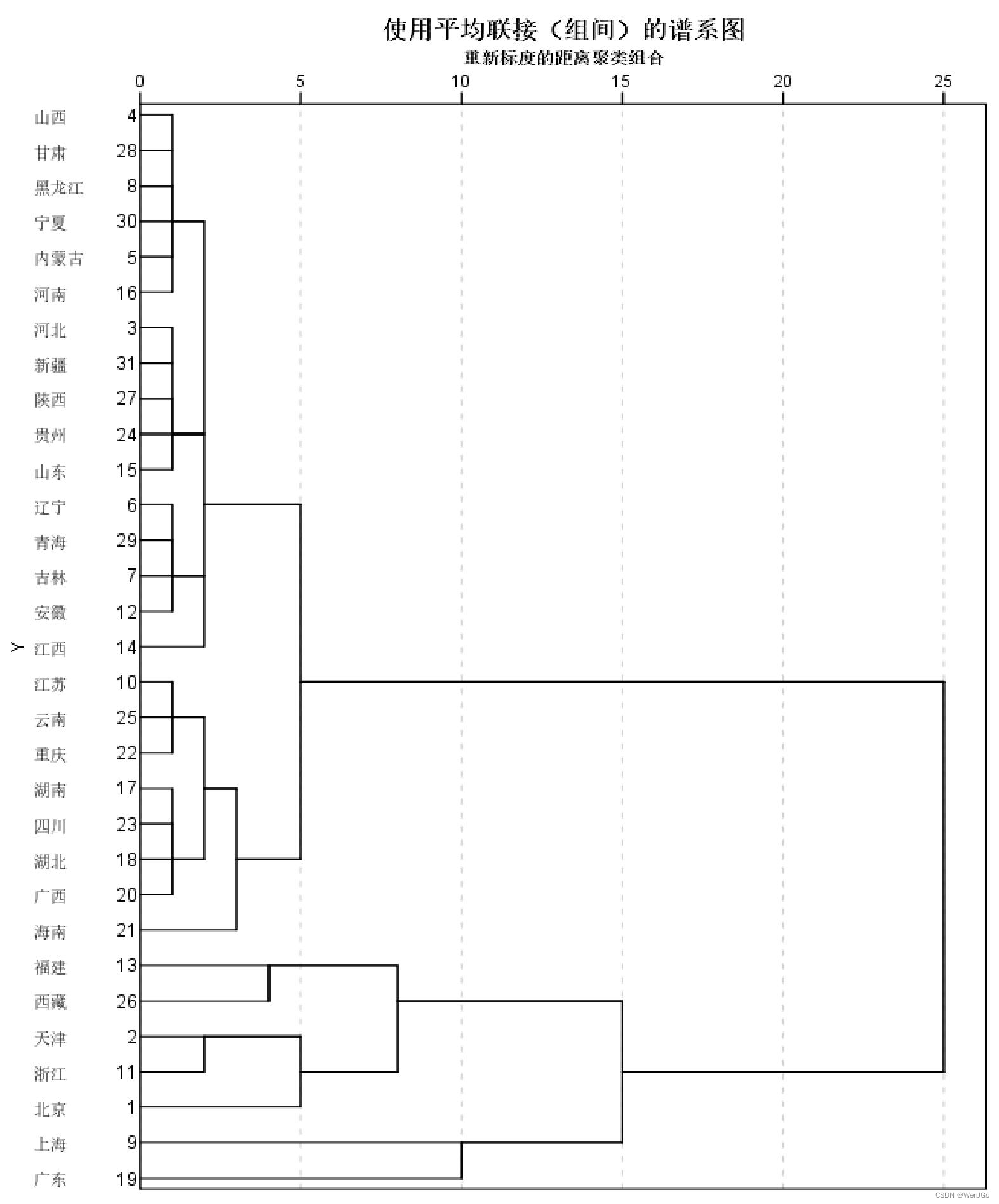
聚类谱系图(树状图)
谱系图是较新的Spss版本添加的功能
横轴表示各类之间的距离
(该距离经过了重新标度)
聚类的个数可以自己从图中决定。
Spss结果中还有一种图,被称为冰柱图,
目前已经很少用了。
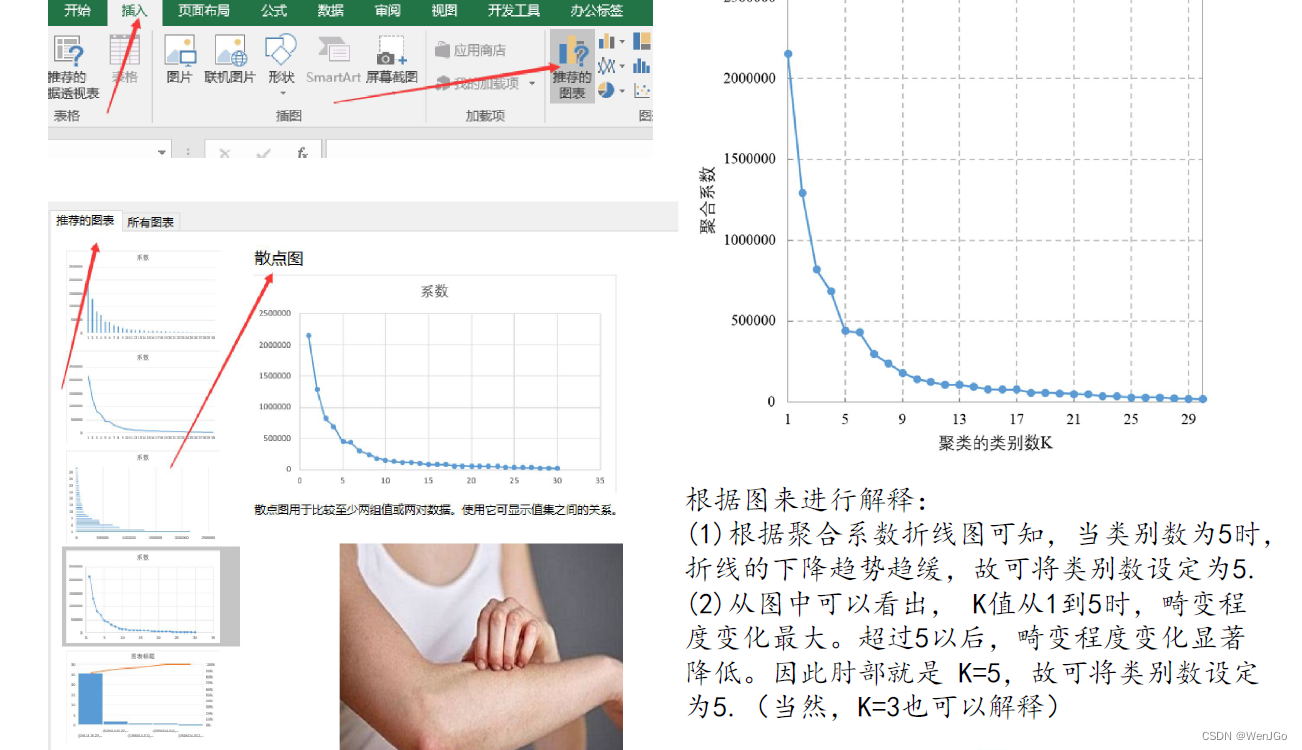
用图形估计聚类的数量
肘部法则(Elbow Method):通过图形大致的估计出最优的聚类数量。

小例子
处理数据

把数据粘贴到Excel表格中,
并按照降序排好。
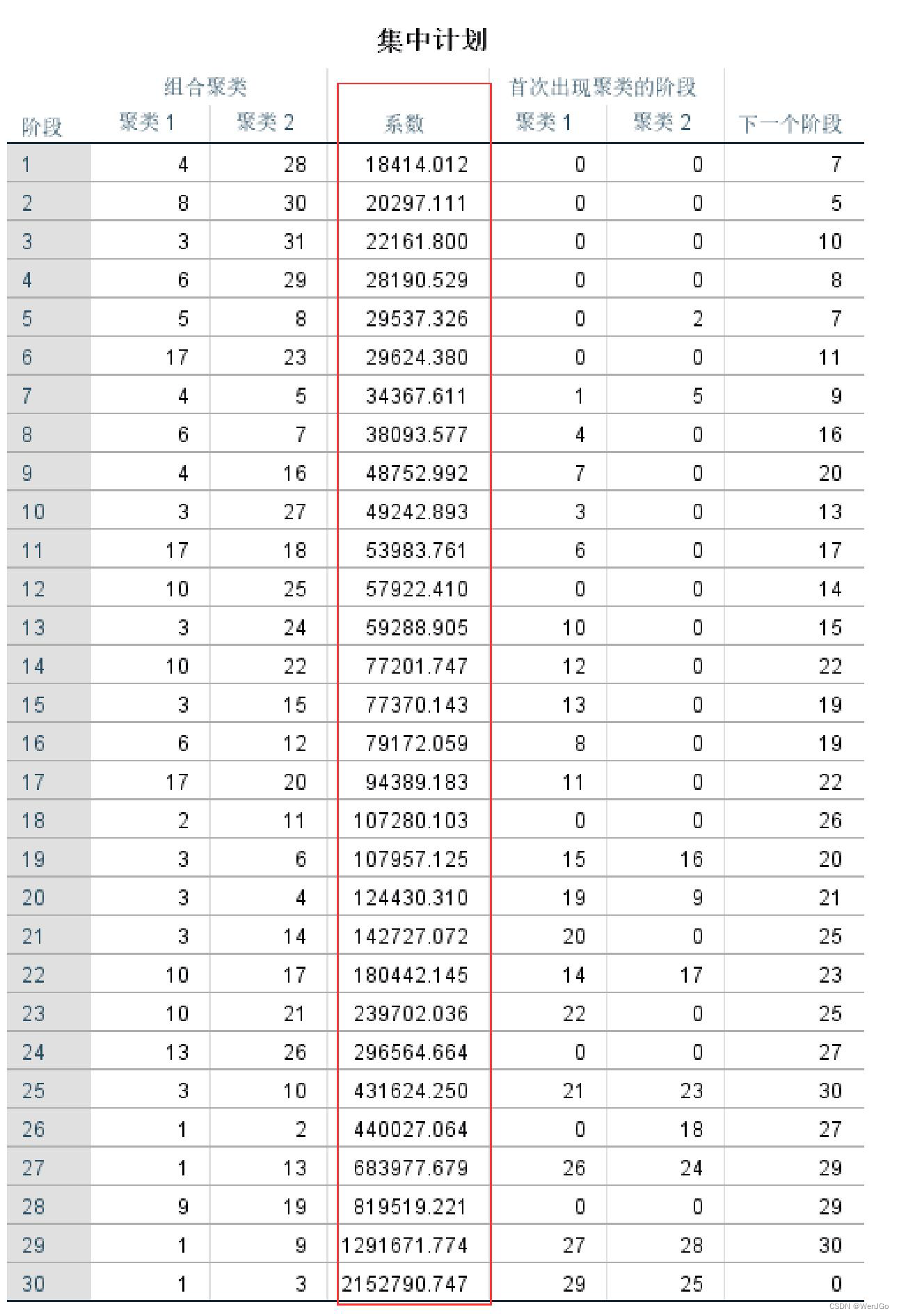
聚合系数折线图的画法
确定K后保存聚类结果并画图

示意图


注意:只要当指标个数为2或者3的时候才能画图,上面两个图纯粹是为了演示作图过程,实际上本例中指标个数有8个,是不可能做出这样的图的。
DBSCAN算法
????????DBSCAN(Density-based spatial clustering of applicationswith noise)是Martin Ester, Hans-PeterKriegel等人于1996年提出的一种基于密度的聚类方法,聚类前不需要预先指定聚类的个数,生成的簇的个数不定(和数据有关)。该算法利用基于密度的聚类的概念,即要求聚类空间中的一定区域内所包含对象(点或其他空间对象)的数目不小于某一给定阈值。该方法能在具有噪声的空间数据库中发现任意形状的簇,可将密度足够大的相邻区域连接,能有效处理异常数据。

DBSCAN:具有噪声的基于密度的聚类方法
谁和我挨的近,我就是谁兄弟
兄弟的兄弟,也是我的兄弟
基本概念
DBSCAN算法将数据点分为三类:
? 核心点:在半径Eps内含有不少于MinPts数目的点
? 边界点:在半径Eps内点的数量小于MinPts,但是落在核心点的邻域内
? 噪音点:既不是核心点也不是边界点的点
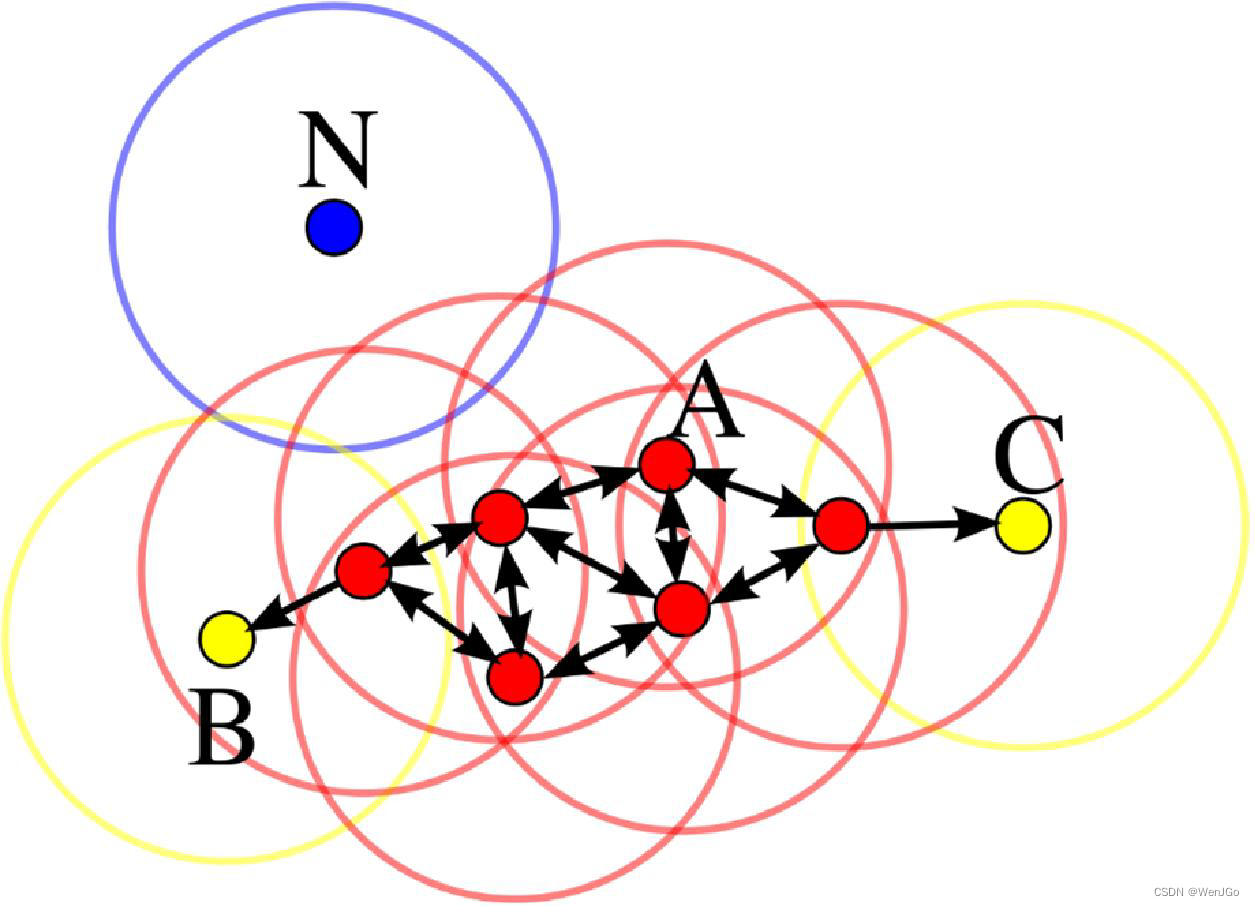
????????在这幅图里,MinPts = 4,点A 和其他红色点是核心点,因为它们的ε-邻域(图中红色
圆圈)里包含最少4 个点(包括自己),由于它们之间相互相可达,它们形成了一个聚类。点B 和点C 不是核心点,但它们可由A 经其他核心点可达,所以也和A属于同一个聚类。点N 是局外点,它既不是核心点,又不由其他点可达。
这个网站可以可视化该算法
可视化 DBSCAN 群集 (naftaliharris.com)
Matlab代码
Matlab官网推荐下载的代码:
DBSCAN Clustering Algorithm - File Exchange - MATLAB Central (mathworks.cn)
注意,MATLAB在2019a版本中正式加入了自己的dbscan函数,内置函数的运行效率
更高,具体使用方法可以查看:
Density-based spatial clustering of applications with noise (DBSCAN) - MATLAB dbscan - MathWorks 中国
也可以看这个推文:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!