【ros笔记】urdf文件
2024-01-08 00:08:11
urdf文件属于xml文件,他的标签有:
<robot name="robot_name">
<!-- 看的见摸的着刚体用link -->
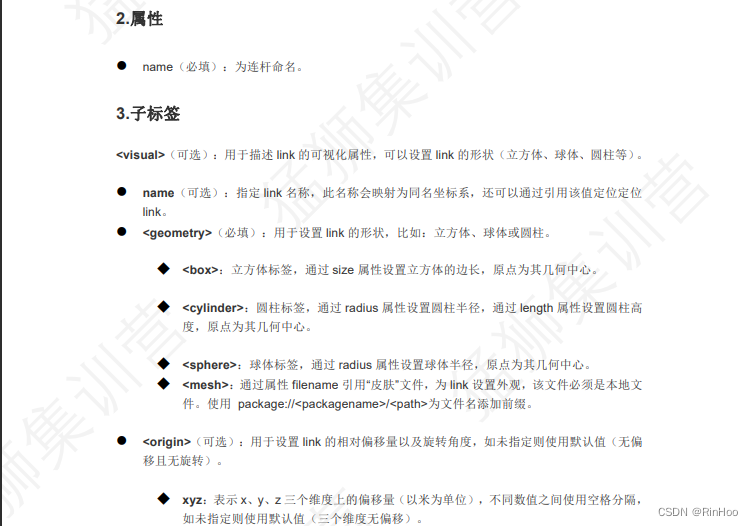
<link name="base_link">
<!-- 可视化部分 -->
<visual>
<!-- 几何形状 -->
<geometry>
<!-- box指的是长方体 -->
<box size="1.0 0.5 0.1" />
</geometry>
</visual>
</link>
</robot>
---------------------------------------------------------------------
设置参数功能:
对于有name参数的标签,可以将其提取到外部,作为公共参数使用,当使用时调用名字即可
<robot name="robot_name">
<visual name="公共参数">
...
</robot>
---------------------------------------------------------------------
还可以设置公共参数:
<param name="my_variable" value="3.14"/>
<!-- Use the parameter in a joint definition -->
<joint name="joint1" type="revolute">
<origin xyz="0 0 0"/>
<axis xyz="0 0 1"/>
<parent link="link1"/>
<child link="link2"/>
<limit lower="-$(param my_variable)" upper="$(param my_variable)" effort="100" velocity="1"/>
</joint>urdf文件仅仅是磁盘文件,要想在rviz2显示它,要把它加载到ros2系统,如何加载呢,使用xacro的小工具,它可以读取磁盘上urdf文件的内容,然后再把xacro集成到launch文件
文章来源:https://blog.csdn.net/weixin_52720049/article/details/135444491
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!