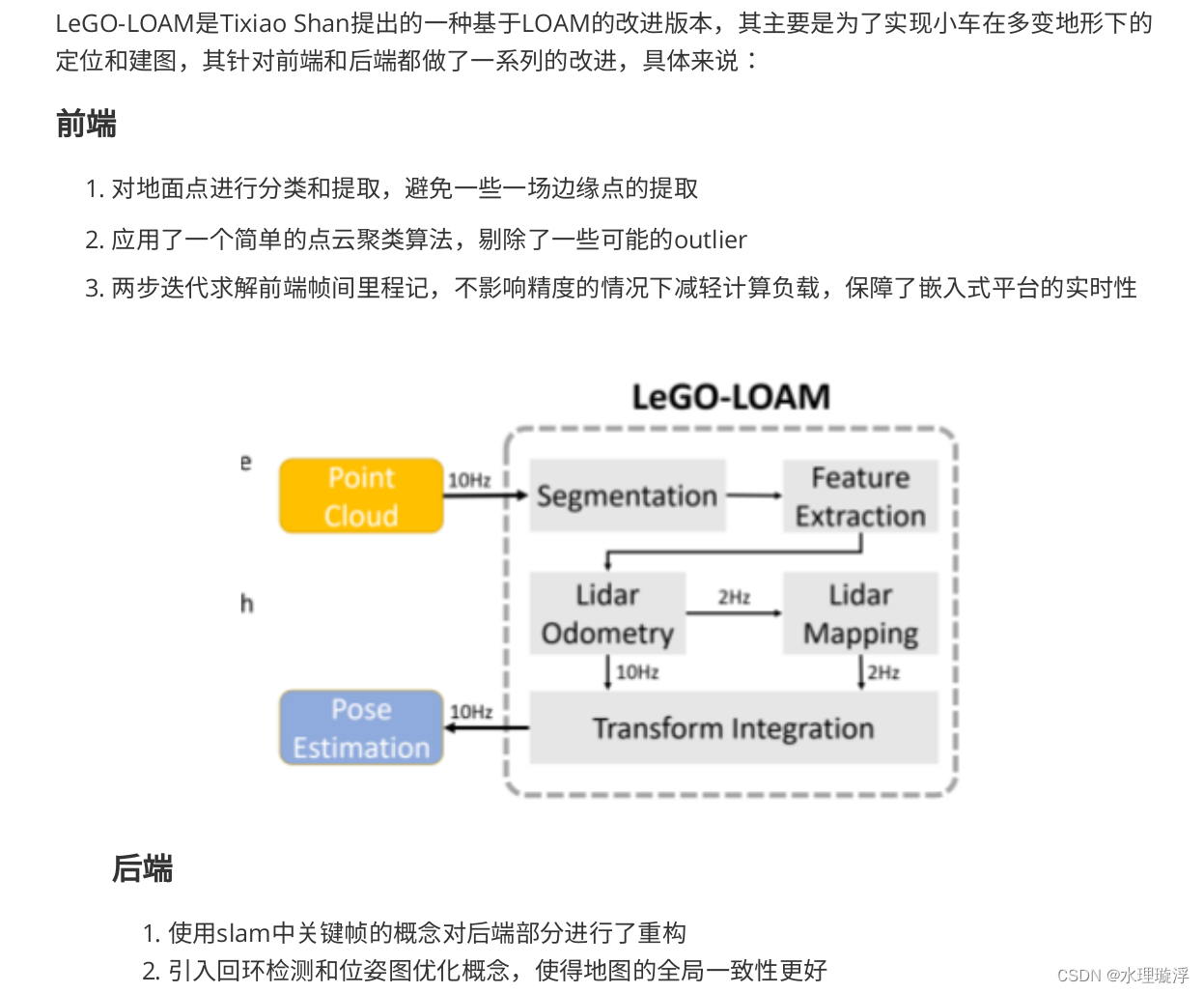
LeGO-LOAM 安装以及运行
2024-01-07 20:41:50
 ?
?
一、源码地址:
二、依赖安装
本机ubuntu18.04 melodic?
三、开始安装
如果已经创建过catkin_ws,直接cd过去就行
cd ~/catkin_ws/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1
source ~/catkin_ws/devel/setup.bash四、运行:
终端1:
roslaunch lego_loam run.launch终端2:
rosbag play YOUR_DATASET_FOLDER/nsh_indoor_outdoor.bag --clock --topic /velodyne_points /imu/data--clock使用BAG的时钟
?包下载地址:https://drive.google.com/file/d/1s05tBQOLNEDDurlg48KiUWxCp-YqYyGH/view
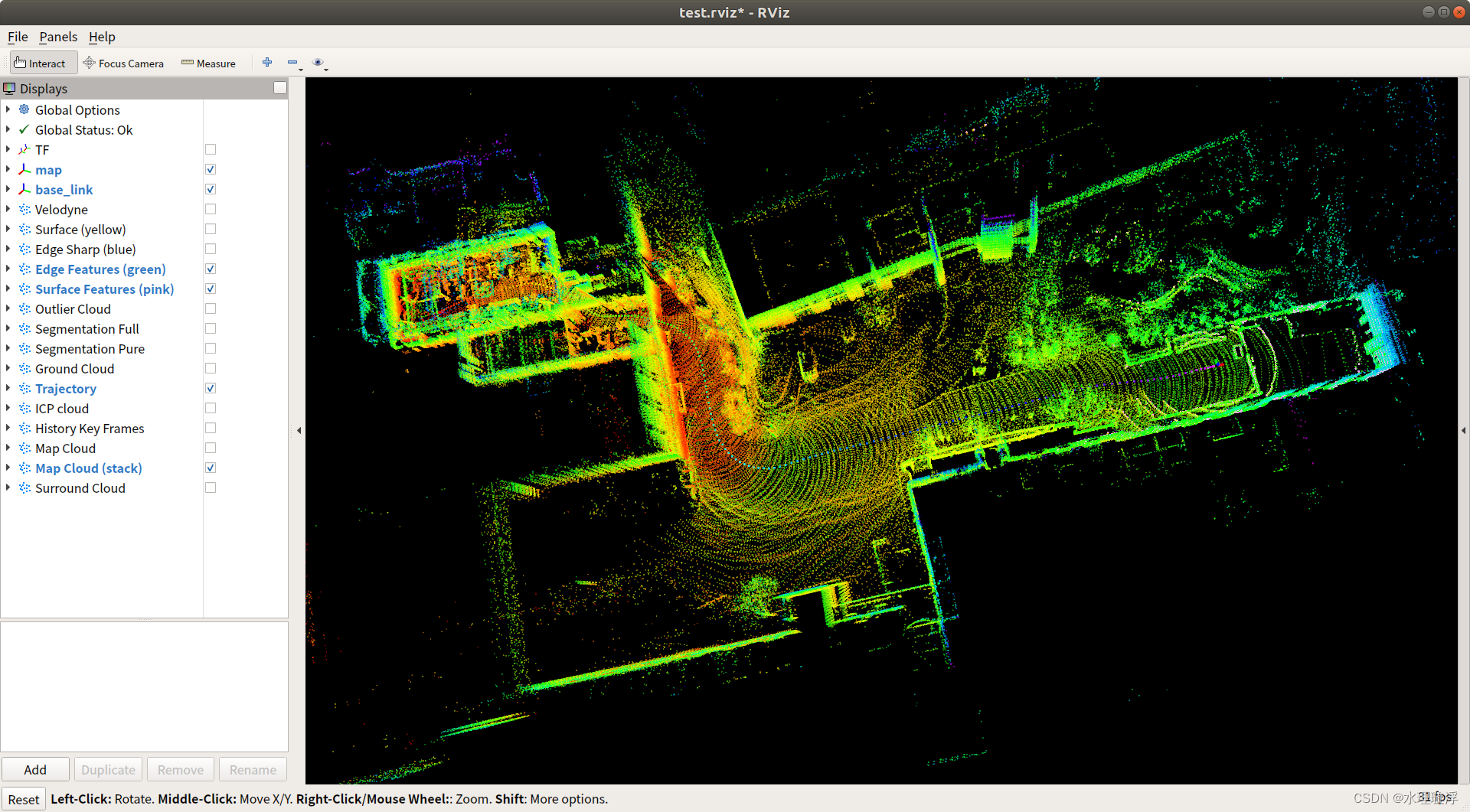
五、效果
?
文章来源:https://blog.csdn.net/weixin_44760904/article/details/135361133
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!