记矩阵基础概念
2023-12-28 17:07:53
转自up:Naruto_Qcsdn:三维空间几何变换矩阵
先贴个站里分享的基础概念。
learn form 肥猫同学VFX b站:会用transform就会用矩阵
移动 旋转 缩放
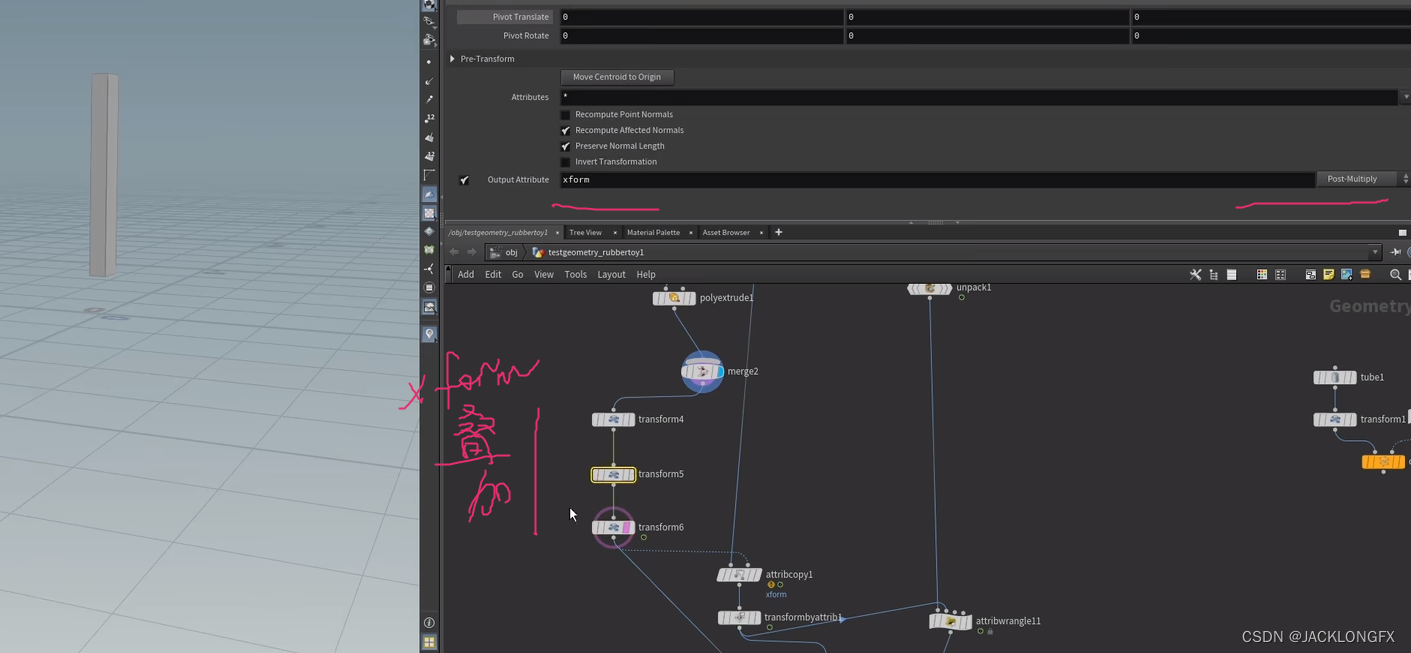
1.transofrm ——输出变化矩阵
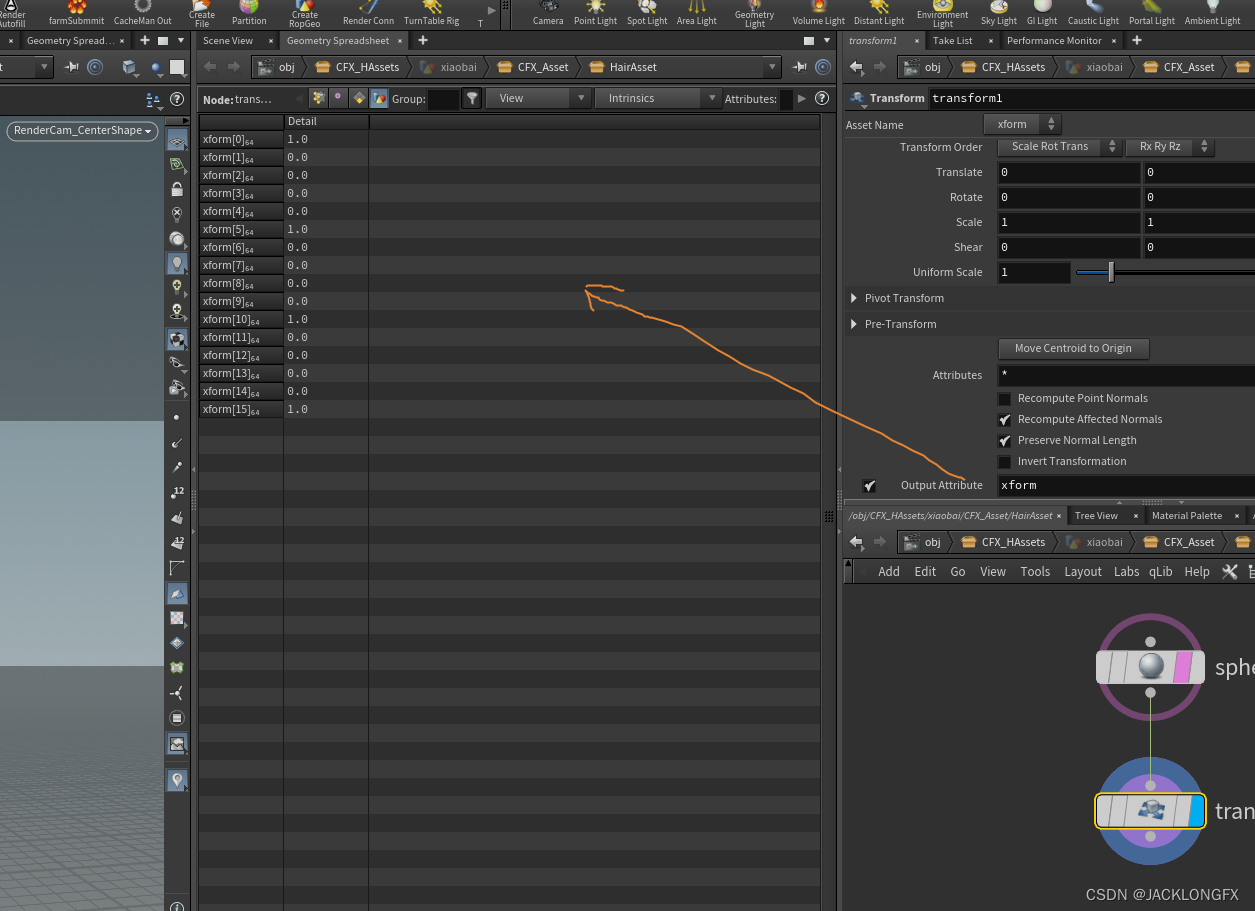
可以移动transform查看变化去理解
位移
![[1 0 0 0]](https://img-blog.csdnimg.cn/direct/8c6e25285b9442299bf7c635b3c3b0ca.png)
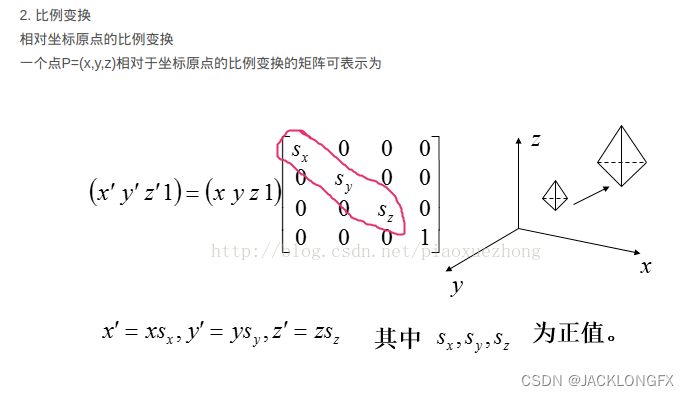
缩放
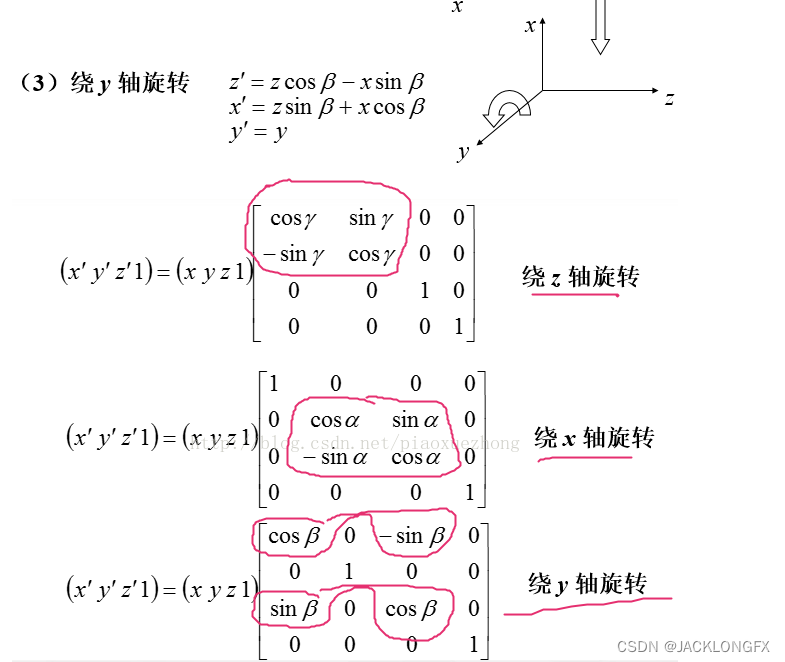
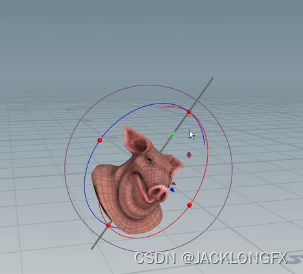
旋转
由此——3*3矩阵无法实现 ,位移
vex
4@m=ident(); //ch4('m')//单位矩阵
scale(@m,ch('sacle'));//缩放 对空间缩放(物体在空间内——同步缩放)
float angle=radians(chf('angle'));
vector axis=chv('axis');
rotate(@m,angle,axis);// 旋转
translate(@m,chv('tran'));//位移 or这里用3*3矩阵 最后@P+位移 也可以
@P*=m;
lookat函数
vector p1=getbbox_center(0);
vector p2=point(1,'P',0);
martix3 m=lookat(p2,p1);
@P*=m;
dihedral 函数 让a转向b
绕指定轴转
vector a={0,1,0};
vector b=normlize(b向量);
martix3 m =dihedral(a,b);
float angle=radians(chf('angle'));
rotate(@m,angle,b);// 旋转
@P*=m;
读取位移信息
copy给物体
读取运动 这里等于复制了3个transform
maketransform
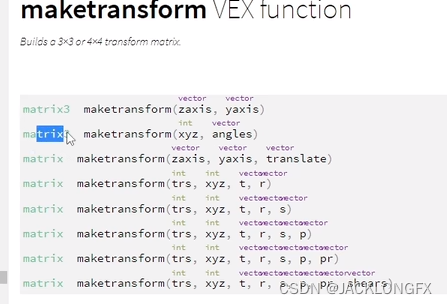
z +y+中心 定义4*4
vector zaxis=z;
vector yaxis=y;
vector translate=getbbox_center(1);
matrix m=maketransform(zaxis,yaxis,translate);
@P*=m;
3*3-------四元数
3@m=ident();
p@q=quaternion(3@m);
逆矩阵 invert
转置矩阵 transpose (eg:(m,n)矩阵A的行和列 给出的转置矩阵At 大小为(n,m))
文章来源:https://blog.csdn.net/JACKLONGFX/article/details/135269163
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!