一起玩儿物联网人工智能小车(ESP32)——20. PWM(脉冲宽度调制)技术初探
摘要:本文主要介绍脉冲宽度调制技术的基本知识。
今天继续完善智能小车的功能。前面,已经通过控制ESP32的GPIO引脚输出高低电平来实现了小车向各个方向行走的运动。但能走只是最基础的功能,下面就来学习在智能小车行走的时候,如何调整智能小车运动的速度。这样,智能小车才不只会同一个速度的横冲直撞,才可以根据需要随时调整运动的速度,具有更好的实用性。
模拟电压和电流可直接用来进行控制用电器的功率,从而改变他们工作的状态。如对汽车收音机的音量进行控制。在简单的模拟收音机中,音量旋钮被连接到一个可变电阻。拧动旋钮时,电阻值变大或变小;流经这个电阻的电流也随之增加或减少,从而改变了驱动扬声器的电流值,使音量相应变大或变小。电动机可以通过改变其电源电压来改变电动机的转速。白炽灯可以通过改变供电的电压来改变其亮度。
尽管模拟控制看起来可能直观而简单,但它并不总是非常经济或可行的。其中一点就是,模拟电路容易随时间产生漂移,因而难以调节。能够解决这个问题的精密模拟电路可能非常庞大、笨重(如老式的家庭立体声设备)和昂贵。模拟电路还有可能严重发热,其功耗相对于工作元件两端电压与电流的乘积成正比。模拟电路还可能对噪声很敏感,任何扰动或噪声都肯定会改变电流值的大小。
人们希望找到一种以数字方式控制模拟电路,可以大幅度降低系统的成本和功耗的方法。PWM(脉冲宽度调制)技术就诞生了。PWM技术的基本原理就是在输出电压一定的情况下,通过改变输出信号的高低电平的比例,来改变输出信号的有效功率,从而实现对被驱动设备的功率控制。
在工控行业,PWM信号可以用来调节电机转速、调节变频器以及BLDC(无刷直流)电机驱动等;在LED照明行业,可以通过PWM来控制LED灯的亮暗变化;还可以通过PWM信号来控制无源蜂鸣器发出简单的声音以及实现功率继电器的线圈节能等。
PWM技术有两个非常重要的参数,是一定要知道的。那就是频率和占空比。频率是指在1秒钟内,信号从高电平到低电平再回到高电平的次数,也就是说一秒钟PWM有多少个周期,单位Hz。频率与大家熟知的周期呈倒数关系。
占空比是指是在一个脉冲周期内,高电平的时间与整个周期时间的比例,其单位是百分比(%),其值是在0%~100%之间的任意数值。如下图所示:
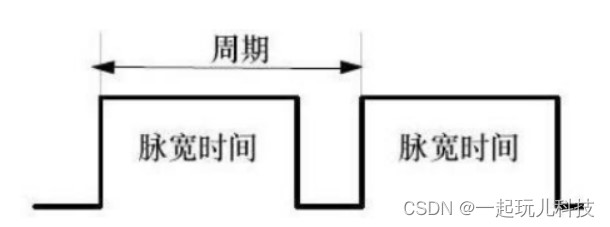
脉宽时间与周期之间的比值就是占空比。这样,只要利用单片机的GPIO引脚,控制其输出高电平的比例,就可以实现PWM技术了。
假如单片机的输出GPIO的高电平为5V,低电平为0V。那么当其输出的PWM波的占空比为50%时,也就是高电平占一半时间,低电平占一半时间,那么在一定的频率下,就可以得到2.5V的模拟电压。同样,75%的占空比就是3.75V,而20%的占空比就是1V,如下图所示。

这样,通过控制不同的占空比,理论上就可以得到0~5V之间任意的模拟电压值了。PWM技术就是通过这种方法实现数字信号到模拟信号的转换的。
大家会问了,占空比就决定了输出模拟信号的高低了,那为啥频率还是重要指标呢?这是因为PWM信号,只有达到了一定的频率才能起到相应的作用。至于适当的频率是多少,和你要驱动的设备相关。比如对于LED灯来说,只有PWM的频率超过了80Hz,由于眼睛的视觉滞留效应,人才能完全感觉不到灯在闪烁。当然,也不是频率越高越好。比如,对于电机的控制,如果频率太高,可能导致电机反应不过来而达不到控制的目的。太低的频率会导致电机运动不稳定,如果该频率恰好落在人耳的听觉范围,那么还会听到呼啸声。
这就是PWM技术的基本情况,接下来会介绍如何使用ESP32的PWM功能实现LED灯的亮度控制和对智能小车的车速控制。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!