[足式机器人]Part2 Dr. CAN学习笔记-数学基础Ch0-8Matlab/Simulink传递函数Transfer Function
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-数学基础Ch0-8Matlab/Simulink传递函数Transfer Function

L
?
1
[
a
0
Y
(
s
)
+
s
Y
(
s
)
]
=
L
?
1
[
b
0
U
(
s
)
+
b
1
s
U
(
s
)
]
?
a
0
y
(
t
)
+
y
˙
(
t
)
=
b
0
u
(
t
)
+
b
1
u
˙
(
t
)
?
y
˙
?
b
1
u
˙
=
b
0
u
?
y
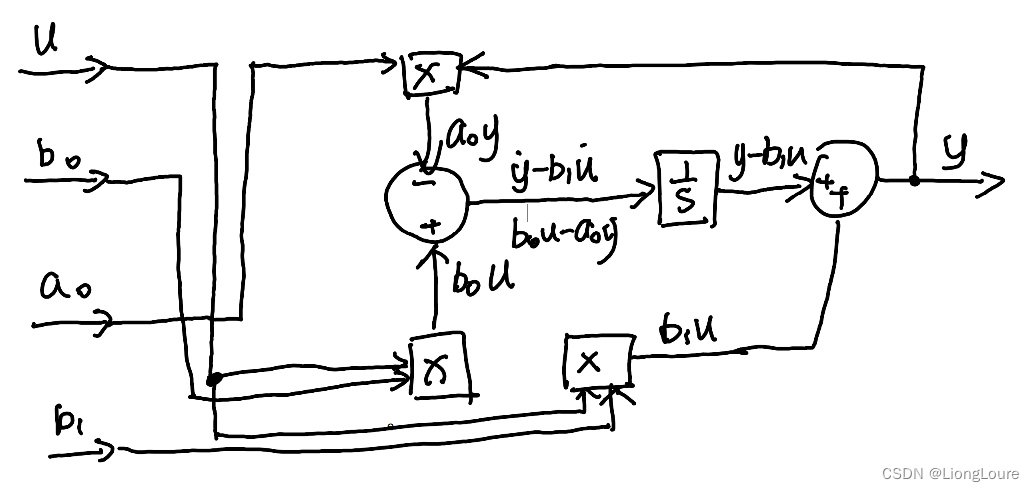
\mathcal{L} ^{-1}\left[ a_0Y\left( s \right) +sY\left( s \right) \right] =\mathcal{L} ^{-1}\left[ b_0U\left( s \right) +b_1sU\left( s \right) \right] \\ \Rightarrow a_0y\left( t \right) +\dot{y}\left( t \right) =b_0u\left( t \right) +b_1\dot{u}\left( t \right) \\ \Rightarrow \dot{y}-b_1\dot{u}=b_0u-y
L?1[a0?Y(s)+sY(s)]=L?1[b0?U(s)+b1?sU(s)]?a0?y(t)+y˙?(t)=b0?u(t)+b1?u˙(t)?y˙??b1?u˙=b0?u?y

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!