Model-based value iteration and policy iteration pseudocode
2023-12-19 22:15:57
Note that the symbols used in the?pseudocode below have the following meanings:
MDP: Markov Decision Process;V(s): Value function, the avg reture of one state;π(s): Policy, in the sense that?for a given states,π(s)represents the action that the agent will take in that state according to the policy, ?usually can be divided into a?random manner or a?deterministic manner;R(s,a): Immediate reward when taking actionain states;P(s'|s,a): Transition probability from statesto states'under an actiona;γ: Discount factor for future reward.
Value iteration:
function ValueIteration(MDP):
? ? // MDP is a Markov Decision Process
? ? V(s) = 0 for all states s ?// Initialization
? ? repeat until convergence:
? ? ? ? delta = 0
? ? ? ? for each state s:
? ? ? ? ? ? v = V(s)
? ? ? ? ? ? V(s) = max over all actions a of [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
? ? ? ? ? ? delta = max(delta, |v - V(s)|)
? ? return V ?// Optimal value function
function ExtractOptimalPolicy(MDP, V):
? ? // MDP is a Markov Decision Process, V is the optimal value function
? ? for each state s:
? ? ? ? π(s) = argmax over all actions a of [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
? ? return π ?// Optimal policyPolicy iteration:
function PolicyIteration(MDP):
// MDP is a Markov Decision Process
Initialize a policy π arbitrarily
repeat until policy converges:
// Policy Evaluation
V = EvaluatePolicy(MDP, π)
// Policy Improvement
π' = GreedyPolicyImprovement(MDP, V)
if π' = π:
break // Policy has converged
π = π'
return π // Optimal policy
function EvaluatePolicy(MDP, π):
// MDP is a Markov Decision Process, π is a policy
V(s) = 0 for all states s // Initialization
repeat until convergence:
delta = 0
for each state s:
v = V(s)
V(s) = Σ P(s' | s, π(s)) * [ R(s, π(s)) + γ * V(s') ]
delta = max(delta, |v - V(s)|)
return V // Value function under the given policy
function GreedyPolicyImprovement(MDP, V):
// MDP is a Markov Decision Process, V is a value function
for each state s:
π(s) = argmax over all actions a of [ R(s, a) + γ * Σ P(s' | s, a) * V(s') ]
return π // Improved policy
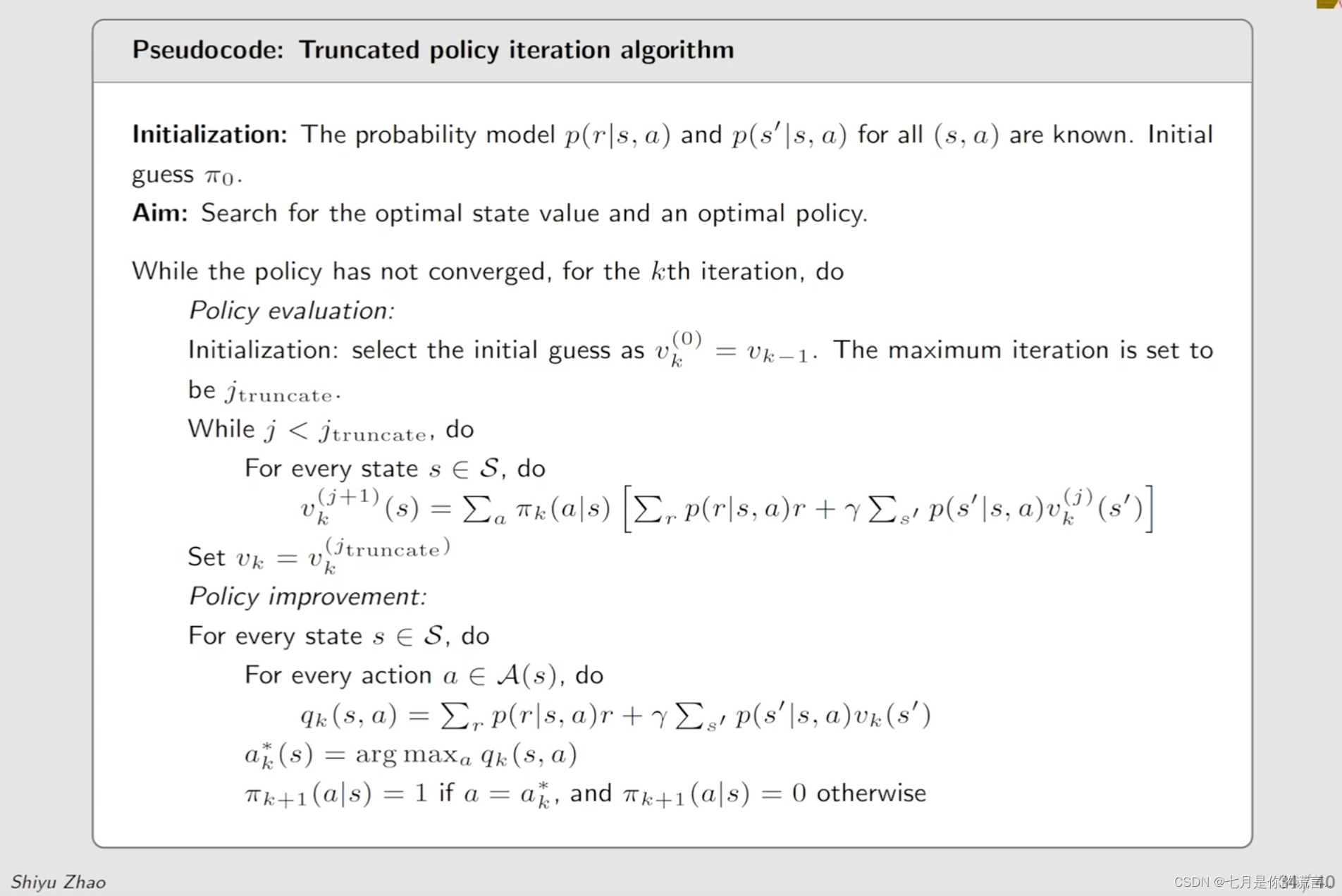
given the?shiyu Zhao's course [1] ppt :

References:
文章来源:https://blog.csdn.net/ambitiousssssss/article/details/135094307
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!