《LIO-SAM阅读笔记》1.IMU预积分模块
2023-12-24 17:27:27
前言:
????????LIO-SAM是一个多传感器融合的紧耦合SLAM框架,融合的传感器类型有雷达、IMU和GPS,其中雷达和IMU在LIO-SAM框架中必须使用的。LIO-SAM的优化策略采用了GTSAM库,GTSAM库采用了因子图的优化方法,其提供了一些列C++的外部接口,以便用户方便传入参数等进行优化。特别的是GTSAM库专门单独设计关于IMU计算与优化的接口。
????????IMU预积分模块在LIO-SAM源码中写在了imuPreintegration.cpp文件中,其中预积分模块的功能使用class IMUPreintegration来实现,IMUPreintegration类中构造函数中最主要的两个部分分别是imu的回调函数imuHandler和odom的回调函数odometryHandler。
1.IMU回调函数imuHandler
2.odom回调函数odometryHandler
在odometryHandler回调函数中主要进行了imu数据和lidar的里程计数据联合进行因子图优化的操作。
2.1?odometryHandler中进行的主要操作
- Step 0. 系统初始化,第一帧
- Step 1. 计算前一帧与当前帧之间的imu预积分量,用前一帧状态施加预积分量得到当前帧初始状态估计,添加来自mapOptimization的当前帧位姿,进行因子图优化,更新当前帧状态
- Step 2. 优化之后,执行重传播;优化更新了imu的偏置,用最新的偏置重新计算当前激光里程计时刻之后的imu预积分,这个预积分用于计算每时刻位姿。
- Step 3. 每隔100帧激光里程计,重置ISAM2优化器,保证优化效率
2.2 因子图优化的步骤
- 1.添加imu预积分因子
// 上面imu预积分的结果
const gtsam::PreintegratedImuMeasurements &preint_imu = dynamic_cast<const gtsam::PreintegratedImuMeasurements &>(*imuIntegratorOpt_);
// 参数:前一帧位姿,前一帧速度,当前帧位姿,当前帧速度,前一帧偏置,预计分量 //?:此处的当前帧位姿和当前帧速度是哪里得到的?此处是否是待求量?
gtsam::ImuFactor imu_factor(X(key - 1), V(key - 1), X(key), V(key), B(key - 1), preint_imu);
graphFactors.add(imu_factor);- 2.添加imu偏置因子,前一帧偏置,当前帧偏置,观测值,噪声协方差;deltaTij()是积分段的时间
graphFactors.add(gtsam::BetweenFactor<gtsam::imuBias::ConstantBias>(B(key - 1), B(key), gtsam::imuBias::ConstantBias(),
gtsam::noiseModel::Diagonal::Sigmas(sqrt(imuIntegratorOpt_->deltaTij()) * noiseModelBetweenBias)));
- 3.添加位姿因子
gtsam::Pose3 curPose = lidarPose.compose(lidar2Imu);
gtsam::PriorFactor<gtsam::Pose3> pose_factor(X(key), curPose, degenerate ? correctionNoise2 : correctionNoise);
graphFactors.add(pose_factor);
// 用前一帧的状态、偏置,施加imu预计分量,得到当前帧的状态 // note: 前一帧的状态是经过上一次优化后的结果
gtsam::NavState propState_ = imuIntegratorOpt_->predict(prevState_, prevBias_);- 4.变量节点赋初值
graphValues.insert(X(key), propState_.pose());
graphValues.insert(V(key), propState_.v());
graphValues.insert(B(key), prevBias_);- 5.优化
optimizer.update(graphFactors, graphValues);
optimizer.update();
graphFactors.resize(0);
graphValues.clear();
// 优化结果
gtsam::Values result = optimizer.calculateEstimate();注意:?每优化完成一次后,就会清空因子图和变量,优化器是每100帧重置一次。因此每次向优化器内添加的因子图和变量是一一对应的。
- 6.利用优化结果更新状态量
// 更新当前帧位姿、速度
prevPose_ = result.at<gtsam::Pose3>(X(key));
prevVel_ = result.at<gtsam::Vector3>(V(key));
// 更新当前帧状态
prevState_ = gtsam::NavState(prevPose_, prevVel_);
// 更新当前帧imu偏置
prevBias_ = result.at<gtsam::imuBias::ConstantBias>(B(key));- 7.重置预积分器,设置新的偏置,这样下一帧激光里程计进来的时候,预积分量就是两帧之间的增量
imuIntegratorOpt_->resetIntegrationAndSetBias(prevBias_);2.3 因子图优化之后的重传播步骤
????????这里用一张示意图来表达,这一部操作最主要的原因是:imu接受数据的频率大于odom里程计的数据,因此每来一个odom数据,队列中已经有多个imu数据,而因子图优化的频率是按照odom里程计的频率来进行的,因此如果想要得到每一个imu数据时刻的位姿估计就要以最近的odom时刻的位姿为初始值,通过每个imu数据时刻的预积分进行位姿的传播。

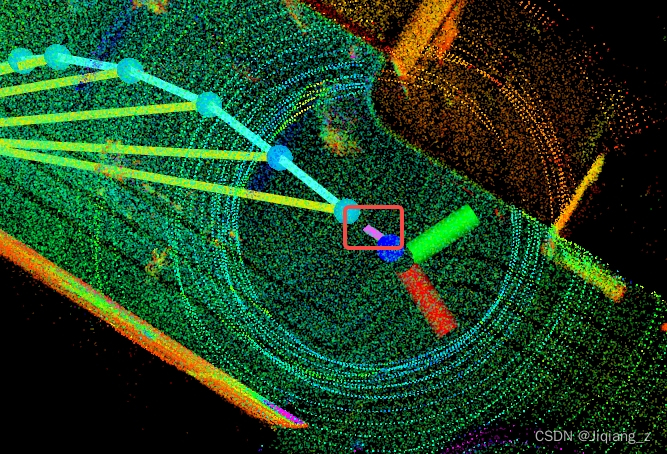
效果展示:此处一小段粉红色的轨迹就是通过经过因子图优化后的重传播(IMU预积分)预测出的轨迹,前面蓝色的轨迹是因子图优化得到的轨迹。
文章来源:https://blog.csdn.net/jjjqqq123321/article/details/135183085
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!