艾思控AQMD6008BLS-TE无刷电机驱动使用笔记(配合STM32)
2024-01-07 18:01:14
一、介绍

本驱动器使用的电机电流精确检测技术、有感无刷电机自测速、有感无刷电机转动位置检测、再生电流恒电流制动(或称刹车)技术和强大的PID调节技术可地控制电机平稳正反转、换向及制动,输出电流实时调控防止过流,精准控制电机转速和转动位置,电机响应时间短且反冲力小。
二、使用方法
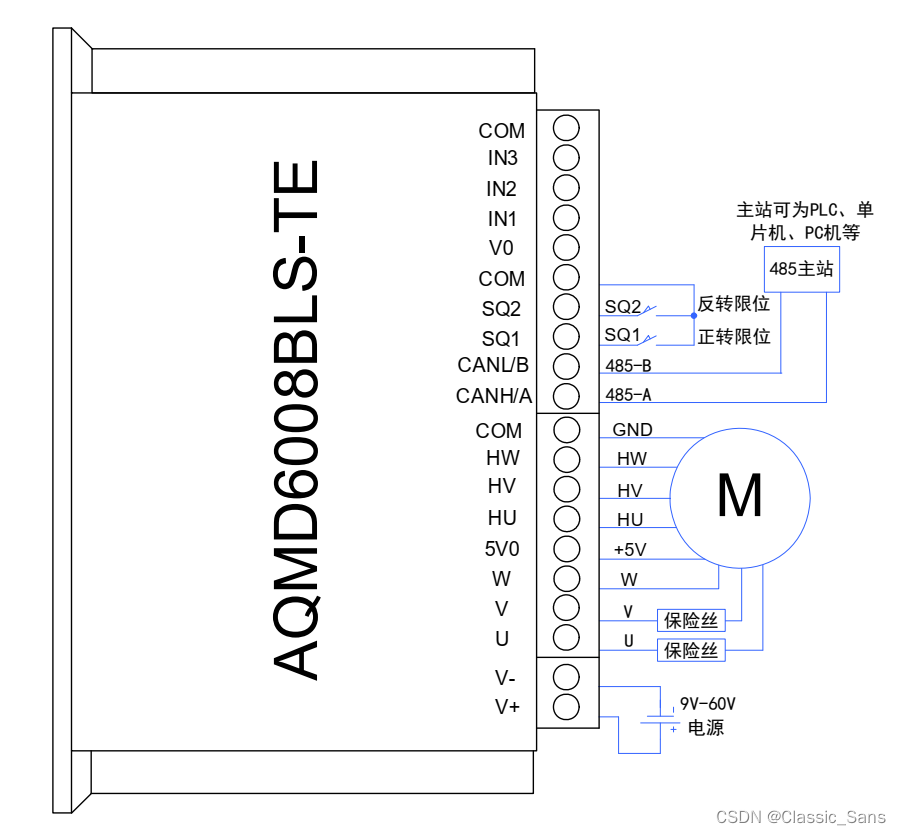
该款无刷电机驱动有多种使用方法,就stm32而言,可以通过输出PWM信号对电机进行调速,也可通过485通讯或CAN通讯与电机驱动进行通讯(电机驱动内部应该也是另外一块32)。项目使用过程中,经导师建议,优先采用485通讯方式。在使用此种通讯方式时,注意设备地址和通讯参数(波特率、奇偶校验等)的设置。
在通过速度控制寄存器进行速度控制时,可以通过0x0042寄存器设定占空比,也可通过0x0043寄存器设定换向频率。另外,在正确配置电机极个数和减速比之后,可以通过0x0034寄存器读取电机的转速。
三、代码
在编写代码的过程中,有参考硬件家园刘工的工程代码,在此表示感谢。
Motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__
#include "MyApplication.h"
//定义枚举类型
typedef enum
{
M1 = (uint8_t)0x01,
M2 = (uint8_t)0x02,
}Motor_Num_t;
//定义结构体类型
typedef struct
{
uint8_t M1_Addr;
uint8_t M2_Addr;
FlagStatus_t Motor_Move_State;
uint16_t M1_Read_Value;
uint16_t M2_Read_Value;
void (*Motor_Set_PWM)(uint8_t, float, UART_t*);
void (*Motor_Read_Value)(uint8_t, UART_t*);
void (*Protocol_Read_Speed)(uint8_t, UART_t*);
void (*Motor_PWM_Acc_Buffer)(uint8_t, float, UART_t*);
void (*Motor_PWM_Rv_Buffer)(uint8_t, float, UART_t*);
void (*Motor_Brake)(uint8_t, UART_t*);
} Motor_t;
/* extern variables-----------------------------------------------------------*/
extern Motor_t Motor;
/* extern function prototypes-------------------------------------------------*/
#endif
/********************************************************
End Of File
********************************************************/
Motor.c
/* Includes ------------------------------------------------------------------*/
#include "MyApplication.h"
/* Private define-------------------------------------------------------------*/
#define FunctionCode_Read_Motor (uint8_t)0x03
#define FunctionCode_Write_Motor (uint8_t)0x06
#define UART3_Read_Speed_LENGTH (uint8_t)7
/* Private variables----------------------------------------------------------*/
static void Motor_Set_PWM(uint8_t, float, UART_t*);
static void Motor_Read_Value(uint8_t, UART_t*);
static void Protocol_Read_Speed(uint8_t, UART_t*);
static void Motor_PWM_Acc_Buffer(uint8_t, float, UART_t*);
static void Motor_PWM_Rv_Buffer(uint8_t, float, UART_t*);
static void Motor_Brake(uint8_t, UART_t*);
/* Public variables-----------------------------------------------------------*/
Motor_t Motor =
{
0x01,
0x02,
FALSE,
0,
0,
Motor_Set_PWM,
Motor_Read_Value,
Protocol_Read_Speed,
Motor_PWM_Acc_Buffer,
Motor_PWM_Rv_Buffer,
Motor_Brake
};
/* Private function prototypes------------------------------------------------*/
/*
* @name Motor_Set_PWM
* @brief 设置驱动PWM占空比
* @param Motor_Num -> 编号, pwm -> 占空比, UART -> 串口
* @retval None
*/
static void Motor_Set_PWM(uint8_t Motor_Num, float pwm, UART_t* UART)
{
UART_t* const COM = UART;
uint16_t SpeedTemp = (uint16_t)(pwm * 10);
//条件选择语句
switch(Motor_Num)
{
case M1:
{
*(COM->pucSend_Buffer + 0) = Motor.M1_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x42;
*(COM->pucSend_Buffer + 4) = (uint8_t)(SpeedTemp >> 8);
*(COM->pucSend_Buffer + 5) = (uint8_t)SpeedTemp;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
case M2:
{
*(COM->pucSend_Buffer + 0) = Motor.M2_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x42;
*(COM->pucSend_Buffer + 4) = (uint8_t)(SpeedTemp >> 8);
*(COM->pucSend_Buffer + 5) = (uint8_t)SpeedTemp;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
default: System.Assert_Failed();
}
HAL_Delay(30);
}
/*
* @name Motor_Read_Speed
* @brief 通过驱动读取转速
* @param UART -> 串口
* @retval None
*/
static void Motor_Read_Value(uint8_t Motor_Num, UART_t* UART)
{
UART_t* const COM = UART;
//条件选择语句
switch(Motor_Num)
{
case M1:
{
*(COM->pucSend_Buffer + 0) = Motor.M1_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Read_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x34;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = 0x01;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
Modbus.Sensor_To_Read_Flag = 1;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
case M2:
{
*(COM->pucSend_Buffer + 0) = Motor.M2_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Read_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x34;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = 0x01;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
Modbus.Sensor_To_Read_Flag = 2;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
default: System.Assert_Failed();
}
HAL_Delay(30);
}
/*
* @name Protocol_Read_Speed
* @brief 分析串口值
* @param UART_t* -> 串口
* @retval None
*/
static void Protocol_Read_Speed(uint8_t Motor_Num, UART_t* UART)
{
UART_t* const COM = UART;
uint8_t i = 0, Index = 0;
//串口3停止DMA接收
HAL_UART_DMAStop(&huart3);
switch(Motor_Num)
{
case M1:
{
//过滤干扰数据,首字节为modbus地址,共8字节
for(i = 0; i < UART3_Rec_LENGTH; i++)
{
//检测键值起始数据Modbus.Addr
if(Index == 0)
{
if(*(COM->pucRec_Buffer+i) != Motor.M1_Addr)
continue;
}
*(COM->pucRec_Buffer + Index) = *(COM->pucRec_Buffer + i);
//已读取7个字节
if(Index == UART3_Read_Speed_LENGTH - 1)
break;
Index++;
}
//计算CRC-16
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucRec_Buffer, 5); //计算CRC值
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
//校验CRC-16
if(((*(COM->pucRec_Buffer + 5) == CRC_16.CRC_L) && (*(COM->pucRec_Buffer + 6) == CRC_16.CRC_H))
||
((*(COM->pucRec_Buffer + 5) == CRC_16.CRC_H) && (*(COM->pucRec_Buffer + 6) == CRC_16.CRC_L)))
{
//校验地址
if(((*(COM->pucRec_Buffer + 0)) == Motor.M1_Addr) && ((*(COM->pucRec_Buffer + 1)) == FunctionCode_Read_Motor) && ((*(COM->pucRec_Buffer + 2)) == 0x02))
{
Motor.M1_Read_Value = ((*(COM->pucRec_Buffer + 3)) << 8) | ((*(COM->pucRec_Buffer + 4)));
}
}
break;
}
case M2:
{
//过滤干扰数据,首字节为modbus地址,共8字节
for(i = 0; i < UART3_Rec_LENGTH; i++)
{
//检测键值起始数据Modbus.Addr
if(Index == 0)
{
if(*(COM->pucRec_Buffer+i) != Motor.M2_Addr)
continue;
}
*(COM->pucRec_Buffer + Index) = *(COM->pucRec_Buffer + i);
//已读取7个字节
if(Index == UART3_Read_Speed_LENGTH - 1)
break;
Index++;
}
//计算CRC-16
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucRec_Buffer, 5); //计算CRC值
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
//校验CRC-16
if(((*(COM->pucRec_Buffer + 5) == CRC_16.CRC_L) && (*(COM->pucRec_Buffer + 6) == CRC_16.CRC_H))
||
((*(COM->pucRec_Buffer + 5) == CRC_16.CRC_H) && (*(COM->pucRec_Buffer + 6) == CRC_16.CRC_L)))
{
//校验地址
if(((*(COM->pucRec_Buffer + 0)) == Motor.M2_Addr) && ((*(COM->pucRec_Buffer + 1)) == FunctionCode_Read_Motor) && ((*(COM->pucRec_Buffer + 2)) == 0x02))
{
Motor.M2_Read_Value = ((*(COM->pucRec_Buffer + 3)) << 8) | ((*(COM->pucRec_Buffer + 4)));
}
}
break;
}
default: break;
}
//清缓存
for(i = 0; i < UART3_Rec_LENGTH; i++)
{
*(COM->pucRec_Buffer + i) = 0x00;
}
}
/*
* @name Motor_PWM_Acc_Buffer
* @brief 电机PWM加速缓冲
* @param Motor_Num -> 编号, time -> 时间, UART -> 串口
* @retval None
*/
static void Motor_PWM_Acc_Buffer(uint8_t Motor_Num, float time, UART_t* UART)
{
UART_t* const COM = UART;
uint8_t SpeedTemp = (uint8_t)(time * 10);
//条件选择语句
switch(Motor_Num)
{
case M1:
{
*(COM->pucSend_Buffer + 0) = Motor.M1_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x60;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = SpeedTemp;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
case M2:
{
*(COM->pucSend_Buffer + 0) = Motor.M2_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x60;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = SpeedTemp;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
default: System.Assert_Failed();
}
HAL_Delay(30);
}
/*
* @name Motor_PWM_Rv_Buffer
* @brief 电机PWM减速缓冲
* @param Motor_Num -> 编号, time -> 时间, UART -> 串口
* @retval None
*/
static void Motor_PWM_Rv_Buffer(uint8_t Motor_Num, float time, UART_t* UART)
{
UART_t* const COM = UART;
uint8_t SpeedTemp = (uint8_t)(time * 10);
//条件选择语句
switch(Motor_Num)
{
case M1:
{
*(COM->pucSend_Buffer + 0) = Motor.M1_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x51;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = SpeedTemp;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
case M2:
{
*(COM->pucSend_Buffer + 0) = Motor.M2_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x51;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = SpeedTemp;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
default: System.Assert_Failed();
}
HAL_Delay(30);
}
/*
* @name Motor_Brake
* @brief 电机刹车
* @param Motor_Num -> 编号, UART -> 串口
* @retval None
*/
static void Motor_Brake(uint8_t Motor_Num, UART_t* UART)
{
UART_t* const COM = UART;
//条件选择语句
switch(Motor_Num)
{
case M1:
{
*(COM->pucSend_Buffer + 0) = Motor.M1_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x40;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = 0x01;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
case M2:
{
*(COM->pucSend_Buffer + 0) = Motor.M2_Addr;
*(COM->pucSend_Buffer + 1) = FunctionCode_Write_Motor;
*(COM->pucSend_Buffer + 2) = 0x00;
*(COM->pucSend_Buffer + 3) = 0x40;
*(COM->pucSend_Buffer + 4) = 0x00;
*(COM->pucSend_Buffer + 5) = 0x01;
CRC_16.CRC_Value = CRC_16.CRC_Check(COM->pucSend_Buffer, 6);
CRC_16.CRC_H = (uint8_t)(CRC_16.CRC_Value >> 8);
CRC_16.CRC_L = (uint8_t)CRC_16.CRC_Value;
*(COM->pucSend_Buffer + 6) = CRC_16.CRC_H;
*(COM->pucSend_Buffer + 7) = CRC_16.CRC_L;
UART3.SendArray(COM->pucSend_Buffer, 8);
break;
}
default: System.Assert_Failed();
}
HAL_Delay(30);
}
/********************************************************
End Of File
********************************************************/
文章来源:https://blog.csdn.net/You_are_blind/article/details/135365977
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!