超维空间M1无人机使用说明书——52、ROS无人机二维码识别与降落
2024-01-07 17:47:17
引言:使用二维码引导无人机实现精准降落,首先需要实现对二维码的识别和定位,可以参考博客的二维码识别和定位内容。本小节主要是通过获取拿到的二维码位置,控制无人机全向的移动和降落,分为两种,一种是无人机移动到二维码上方直接进行降落,另一种是在降落的过程中继续调整无人机的位置,本小节主要是第一种方式,第二种方式会在后续文档中给出
一、启动二维码识别与降落程序
roslaunch ar_track_landing ar_track_landing.launch
未出现红色报错,表明程序运行正常
launch文件详解
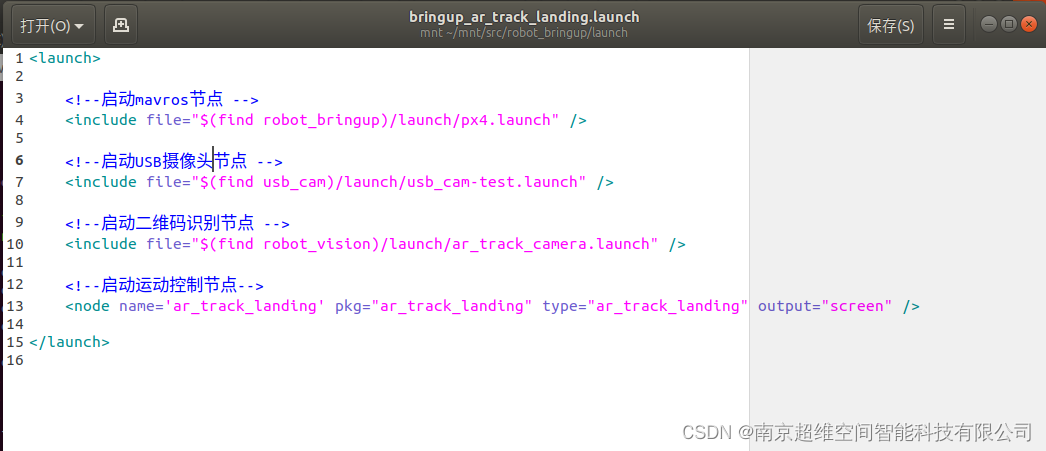
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动二维码识别节点,以话题方式发布识别到的二维码位置信息
4、启动运动控制节点,该节点定位实时的二维码位置信息,进行运动控制
二、视频演示
注:此处视频是采用边降落边调整的方式,是本小节的升级版程序
视频演示: 二维码降落
文章来源:https://blog.csdn.net/qq_35598561/article/details/135438613
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!