Nature Communications 高时空分辨率的机器人传感系统及其在纹理识别方面的应用
前沿速览:
现有的触觉传感器虽然可以精确的检测压力、剪切力和应变等物理刺激,但还难以像人类手指一样通过滑动触摸,同时获取静态压力与高频振动来实现精确的纹理识别。为了解决这一问题,来自南方科技大学的郭传飞团队提出了衔接传感性能与识别性能的时空分辨率基准,并研发了一种基于单个离子电子滑动传感器的实时人工触觉系统,在宽频带范围内对静态和高频动态刺激具有良好的响应能力(0-400Hz),同时实现了15um间距/6um高度下的高空间分辨率以及在400Hz处0.02Hz的高频分辨率。最终,基于超高时空分辨率在滑动感知模式下实现了对于不同织物纹理的超高精度识别(固定模式100%,随机模式98.9%)。这一传感器良好的时空分辨率将有助机器人和假肢患者实现精细的触觉感知,在触觉虚拟现实等领域具有广泛的应用前景。
背景介绍:
随着机器人与环境的交互日益增强,对于触觉的感知能力也与日俱增。现有的触觉感知系统主要基于柔性触觉传感器实现,可以精确地对包括压力、切向力和应变等物理刺激产生响应,并为机器人的操作提供有效反馈。但与人类的触觉相比,现有传感器的性能还存在较大的局限性,通过触觉对真实世界进行感知与识别的能力还远远不够。人类触觉不仅可以感知接触物体的重量和压力,同时可以精确地对目标进行识别,这主要来自于皮肤对于静态压力和高频振动的感知能力:缓慢适应型感受器(SA)主要负责对压力的感知;快速适应型感受器(FA)则对高速变化的动态压力有着较好的响应能力,其中丰富的频率信息为洞察接触中相互作用的特征和目标的识别提供了全新的维度。
人类日常生活中也有很多利用触觉的时空分辨率进行识别典型的例子,包括在表面轻轻滑动识别不同织物的纹理特征以及盲文字母等。这种识别能力可为机器人提供重要的反馈,例如在拿鸡蛋时就会比拿捏相同形状大小和质量的塑料球更加谨慎。但由于缺乏基于触觉的精细感知与识别能力,这种有所区别的灵巧操作能力对于机器人来说依然具有挑战。近年来研究人员受生物感受系统的启发开发出了多种人工感觉系统,并显示了实现精细触觉的广阔潜力。
感知与识别表面精细特征(例如纹理或粗糙度)的关键挑战在于,柔性触觉传感器难以同时实现高灵敏度和快速响应速度,以实现对于静态压力和高频振动的灵敏感知。一方面超高的灵敏度传感器对于微米级的表面特征产生的微弱刺激具有良好的响应;另一方面需要超快的响应速度来分辨表面空间特征与微小高频振动。现有的指尖传感器大多难以在单一传感器中兼顾上述特性,因此人工触觉系统大多使用两个传感器来覆盖静压力与振动检测。同时,传感器检测性能与识别能力间的相关性目前仍未被完全理解,虽然传感器较宽的频带特性被时常提及,但同样重要的时间分辨率(频率分辨率)却鲜有讨论。
为了解决上述问题,研究人员提出了一种基于单个柔性传感器的实时可视化人工感知系统,并引入了时空分辨率作为判定其纹理识别能力的标准。这一传感器利用了可调谐双电层对电容信号实现微纳尺度的电荷分离,获得了高达519KPa-1的超高灵敏度和高达15um间距/6um高度的空间分辨率。同时低粘度离子材料的选择和微结构的设计使得传感器具有400Hz的感知能力与0.02Hz的频率分辨率。较高的时空分辨使得微细表面的滑动感知成为可能,实验中验证了对于20种织物的平均识别精度可达98.6%。展示了在机器人、假肢康复、可穿戴以及触觉虚拟现实等领域的广泛应用前景。
图文解析:

图1 模仿人类进行纹理识别的机器人感知系统。a展示了人类的生物传感系统,b展示了本研究提出的人工触觉系统,其传感器可同时感知静态与动态压力。

图2 本文提出滑动感知传感器的结构、传感特性、静态与动态压力感知机制。a展示了传感器的基本结构,及其在扫描扫描电镜下结果b,c;d,e则展示了归一化的压力电容曲线及其快速响应能力;f为不同频率加载下的的信号变化,g为50kPa下静态与动态特性,h对比了现有传感器的灵敏度和时间分辨率;i,j为黏附强度测试,k为不同压强下微结构离子凝胶与电极的接触情况。

图3 滑动传感器的时空分辨率。a展示了传感器的表面人工指纹13um宽的微结构;b为传感器在10,15,50um间距的微结构表面及其以1mm/s滑动的信号;c为不同高度的纹理的扫描电镜图及其产生的相关信号d; e展示了传感器高达0.02Hz的精细的频率分辨率,及其信号频谱f;g为特征间距275um的织物扫描电镜图像,以及在不同速率下的滑动信号h与频率信号i。

图4 基于传感系统的纺织纹理识别。a为20种纺织品的图像及其对应的结构周期b;c为在2mm/s和40mm/s下滑动感知的特征频率,以及2mm/s下的时域信号d;e,f,g分别展示了20种织物信号在t-SNE特征降维下可视化、及其特征抽取与分类示意图和最终的混淆矩阵;h与i则展示了传感器集成在人手上随机滑动过程中时域信号(16号物品),及其在20中纺织品上的分类结果(平均精度98.9%)。

图5 便携式的实时传感系统及其可视化的用户界面。a是实时传感系统的结构图;b为集成传感器的假肢进行纹理识别及其实时可视化界面展示,其滑动速率为2mm/s;c为传感器以随机速率滑动时的实时感知展示。

补充材料图13 不同织物的频域信号(2mm/s滑动速率下基于小波变换得到)
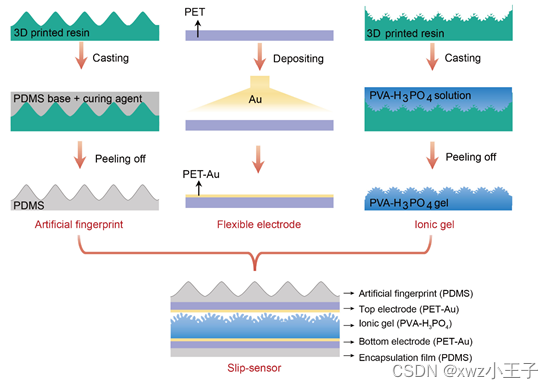
补充材料图21 传感器的制备过程。基于高精度3D打印的模具制备指纹和离子水凝胶,并基于沉积工艺制备柔性电极。
Ref:
论文:https://www.nature.com/articles/s41467-023-42722-4
补充材料:https://static-content.springer.com/esm/art%3A10.1038%2Fs41467-023-42722-4/MediaObjects/41467_2023_42722_MOESM1_ESM.pdf
课题组:https://faculty.sustech.edu.cn/?cat=4&tagid=guocf&iscss=1&snapid=1&go=1
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!