SIGGRAPH 2022 | 筷子该怎么用? ——基于贝叶斯优化和强化学习的灵巧手握筷及控制方法
使用仿生手灵巧地操作工具一直是计算机动画和机器人方向的一个长期具有挑战性的问题。工具使用的主要困难包括:手的高自由度;工具的欠驱动;以及手、工具和物体之间复杂的相互作用。操作的困难程度也取决于所涉及的工具类型。有些工具只需要牢牢地抓在手里,如锤子。有些工具需要用手来抓取和操纵,如剪刀。在本文中,我们考虑最具有挑战性的工具之一:筷子。
筷子是一双等长的棍子,这种简单的机械设计对控制任务带来了一些挑战。首先,手需要同时握住并操纵两根独立的棍子。其次,与剪刀之类的工具不同,筷子上没有明显的固定结构,以稳定手与工具的接触。最后,筷子与物体的接触位于筷子的前端,通常远离靠近筷子后端的筷子与手的接触点。另一方面,筷子的简单形式也确实使其具有多种功能,从而成为广泛使用的工具,而其使用方式也多种多样。据估计,世界上有33%的人口每天都在使用筷子,而每个人都可能有自己独特的使用筷子的方法。筷子可以被用来拿起和移动各种食物:米饭,肉,或面条。在机器人领域,已经开展的研究包括采用筷子来辅助进食,微操作,以及医疗手术等。
筷子的实用性和通用性得益于它简单的机械结构,但是同时使筷子的控制变得困难。在机器人领域,筷子通常被刚性地连接到自由度较低的机器臂上。在图形学领域中,我们的工作是第一篇关于使用筷子的研究,其代表的是更广泛的难以解决的多接触操纵和控制问题。受父母教孩子筷子技巧的启发,我们通过将其分解为两个子问题来解决这个具有挑战性的控制问题:如何正确地握住筷子?如何用筷子操纵物体?
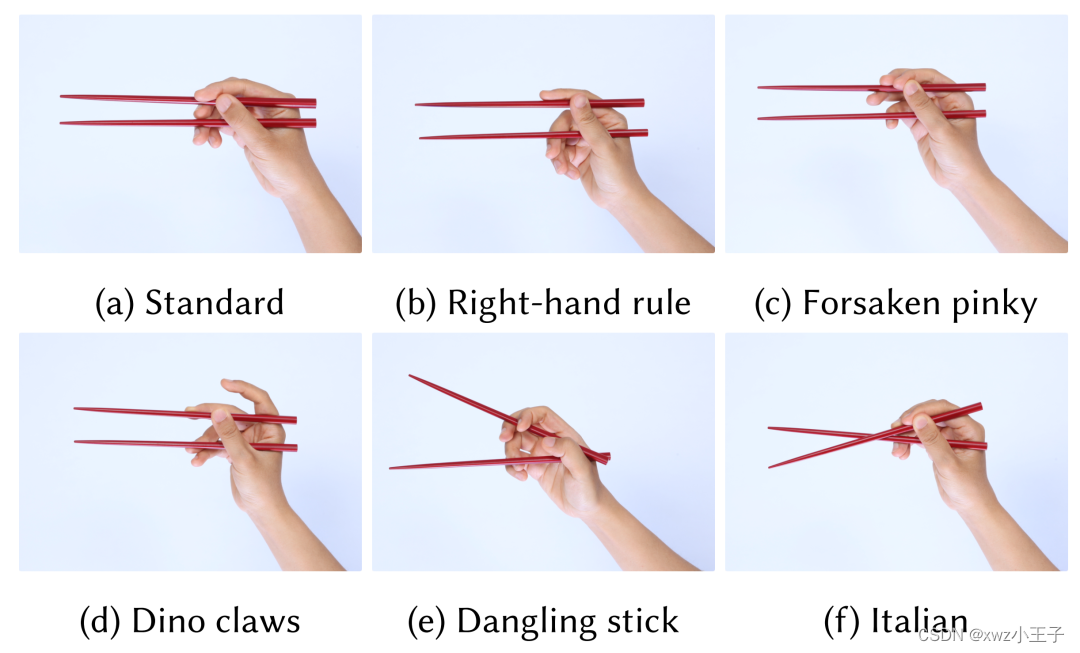
几种握筷子的方法
02
方法介绍
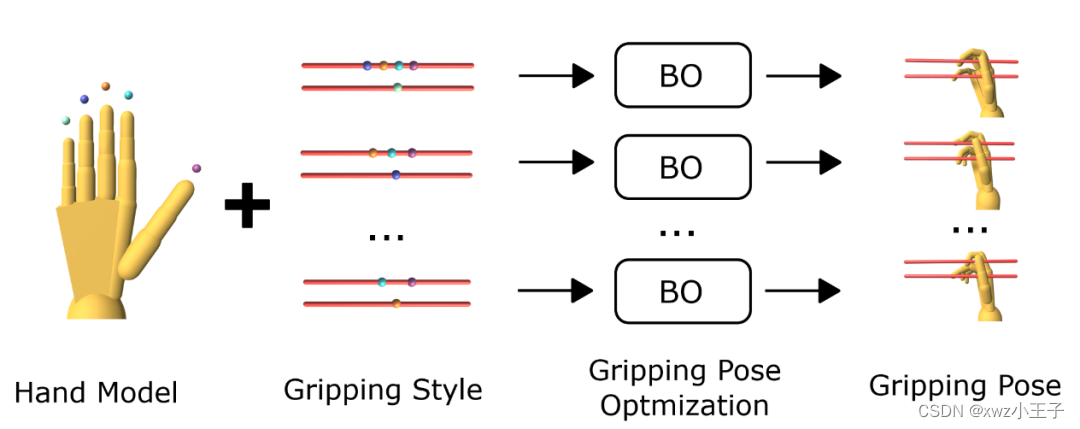
如下图所示,我们通过结合深度强化学习和贝叶斯优化来优化特定样式的抓取姿势。贝叶斯优化是一种优化黑盒函数的方法,它可以利用少量采样点来优化计算昂贵的目标函数。在我们的方法中,针对每一种可能的抓取方式,我们利用贝叶斯优化计算最优的抓取姿势,从而让一只移动的虚拟手可以在物理模拟中牢牢抓住筷子,并实现一些基本的开合筷子的动作。
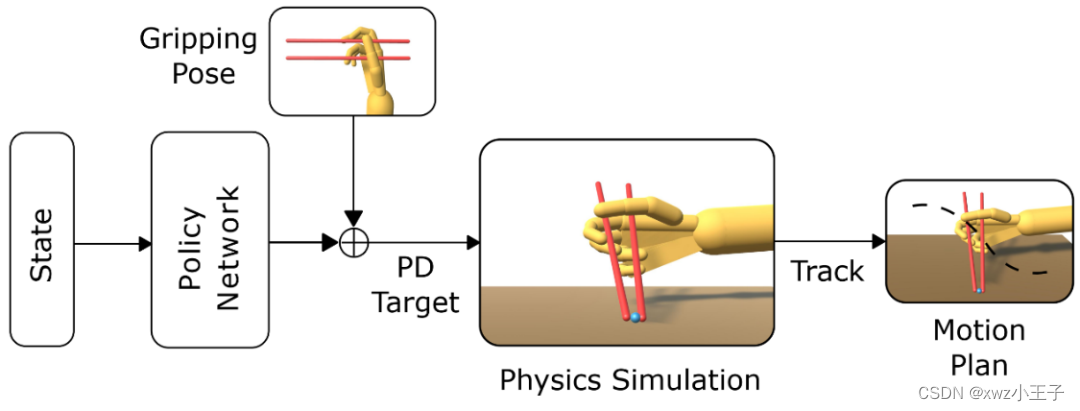
获得了握筷子的姿势之后,我们设计了一个两层控制系统来控制筷子夹着物体移动:首先对筷子的运动进行规划,然后通过深度强化学习方法训练基于物理的手部控制器。在运动规划过程中,我们训练了一个基于神经网络的抓取模型来估算抓取物体的最佳筷子配置,并根据物体的起始和目标位置,利用轨迹优化结合逆向运动学的方法生成无碰撞的筷子和手的运动轨迹。

之后所有规划好的参考轨迹和优化的抓握姿势被传递给强化学习系统,使用简单的跟踪奖励来训练底层的手部控制器。
03
实验结果
我们的贝叶斯优化方法可以根据输入的握持风格优化得到不同的抓握姿势。对于人手来说,去除明显不合理的方法,我们可以得到如下的17种不同的握持方法。

我们的动作控制器在确定了筷子握持姿势后可以控制手用筷子夹起物体,并挪到或扔到指定位置。

我们的算法框架可以控制各种形态的手去使用筷子,下面展示了一只两倍大的手和三指抓取器操作筷子进行夹取。

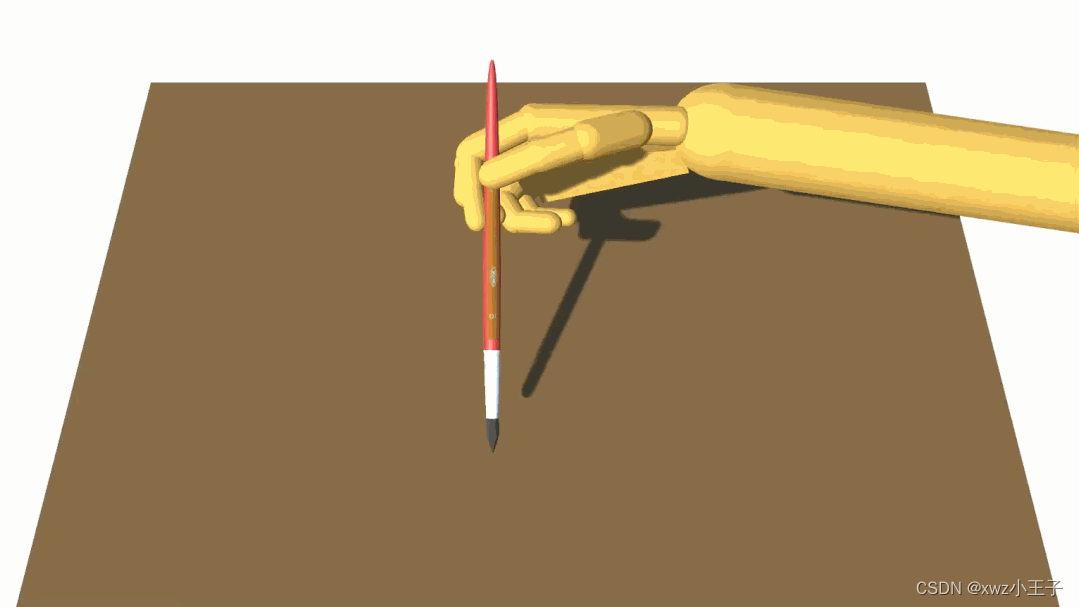
除了筷子以外,我们的算法可以训练手来操作其他物体,下面展示了手握毛笔写字和用镊子夹取物体。
更多细节与模拟结果可参见视频:
04
总 结
我们提出了一个基于物理仿真的学习和控制系统,可以控制手使用筷子进行物体操作。这个任务的挑战性在于它涉及到手、筷子和物体之间复杂的接触。算法的关键在于将任务拆分为两部分:通过贝叶斯优化获得符合既定风格的稳定握筷子姿势,和使用高层轨迹规划+底层动作控制的方法在给定握筷子姿势来完成物体的夹取和移动。我们的算法不需要动作捕捉数据,也有较高的动作质量和不错的鲁棒性。感兴趣的同学可以看我们的视频和文章来进一步了解我们的工作。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!