【论文笔记】动态蛇卷积(Dynamic Snake Convolution)
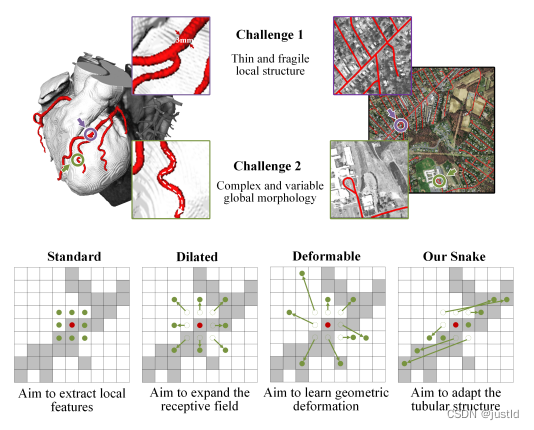
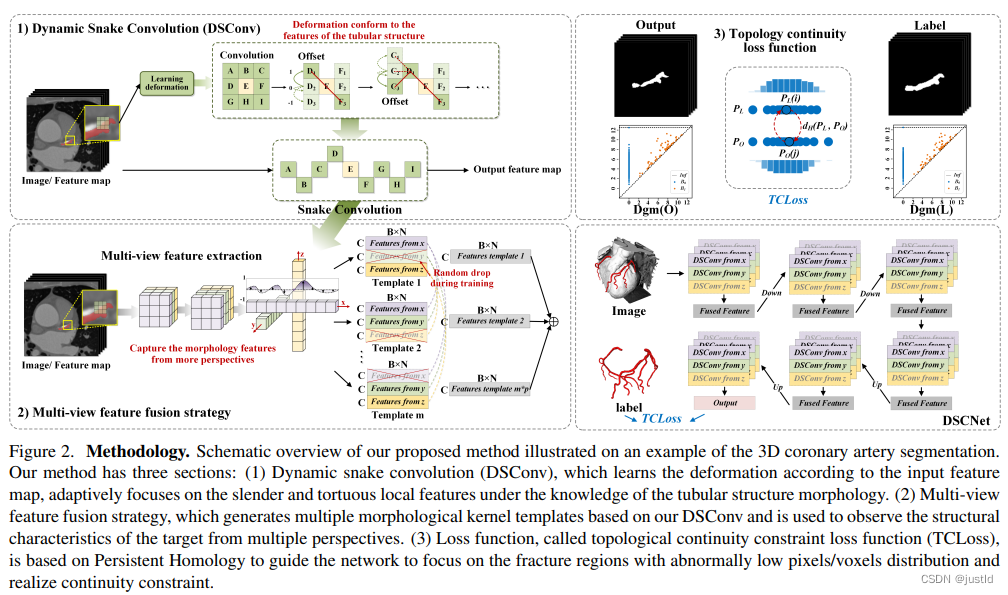
精确分割拓扑管状结构例如血管和道路,对医疗各个领域至关重要,可确保下游任务的准确性和效率。然而许多因素使分割任务变得复杂,包括细小脆弱的局部结构和复杂多变的全局形态。针对这个问题,作者提出了动态蛇卷积,该结构在管状分割任务上获得了极好的性能。
中文论文:拓扑几何约束管状结构分割的动态蛇卷积
代码:https://github.com/yaoleiqi/dscnet
一、适用场景
管状目标分割的特点是细长且复杂,标准卷积、空洞卷积无法更具目标特征调整关注区域,可变形卷积可以更具特征自适应学习感兴趣区域,但是对于管状目标,可变形卷积无法限制关注区域的连通性,而动态蛇卷积限制了关注区域的连通性,是的其更适合管状场景。
二、动态蛇卷积
对于一个标准3x3的2D卷积核K,其表示为:

为了赋予卷积核更多灵活性,使其能够聚焦于目标 的复杂几何特征,受到可变形卷积的启发,引入了变形偏 移 ?。然而,如果模型被完全自由地学习变形偏移,感知场往往会偏离目标,特别是在处理细长管状结构的情 况下。因此,作者采用了一个迭代策略(下图),依次选 择每个要处理的目标的下一个位置进行观察,从而确保关注的连续性,不会由于大的变形偏移而将感知范围扩 散得太远。
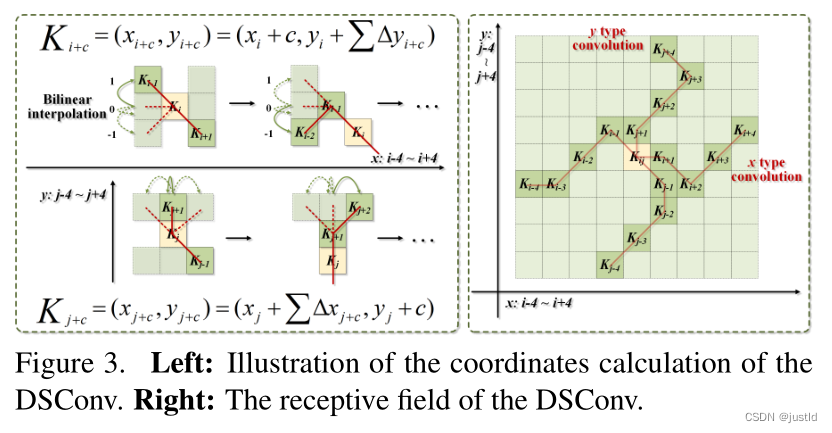
在动态蛇形卷积中,作者将标准卷积核在 x 轴和 y 轴方向都进行了直线化。考虑一个大小为 9 的卷积 核,以 x 轴方向为例,K 中每个网格的具体位置表示 为:Ki±c = (xi±c, yi±c),其中 c = 0, 1, 2, 3, 4 表示距离 中心网格的水平距离。卷积核 K 中每个网格位置 Ki±c 的选择是一个累积过程。从中心位置 Ki 开始,远离中 心网格的位置取决于前一个网格的位置:Ki+1 相对于 Ki 增加了偏移量 ? = {δ|δ ∈ [?1, 1]}。因此,偏移量 需要进行累加 Σ,从而确保卷积核符合线性形态结构。 上图中 x 轴方向的变化为:

y轴方向的变化为:

由于偏移量 ? 通常是小数,然而坐标通常是整数 形式,因此采用双线性插值,表示为:

其中,K 表示方程 2和方程 3的小数位置,K′ 列 举所有整数空间位置,B 是双线性插值核,可以分解为 两个一维核,即:

再给个整体图:
三、代码
蛇卷积的代码如下:
# -*- coding: utf-8 -*-
import os
import torch
from torch import nn
import einops
"""Dynamic Snake Convolution Module"""
class DSConv_pro(nn.Module):
def __init__(
self,
in_channels: int = 1,
out_channels: int = 1,
kernel_size: int = 9,
extend_scope: float = 1.0,
morph: int = 0,
if_offset: bool = True,
device: str | torch.device = "cuda",
):
"""
A Dynamic Snake Convolution Implementation
Based on:
TODO
Args:
in_ch: number of input channels. Defaults to 1.
out_ch: number of output channels. Defaults to 1.
kernel_size: the size of kernel. Defaults to 9.
extend_scope: the range to expand. Defaults to 1 for this method.
morph: the morphology of the convolution kernel is mainly divided into two types along the x-axis (0) and the y-axis (1) (see the paper for details).
if_offset: whether deformation is required, if it is False, it is the standard convolution kernel. Defaults to True.
"""
super().__init__()
if morph not in (0, 1):
raise ValueError("morph should be 0 or 1.")
self.kernel_size = kernel_size
self.extend_scope = extend_scope
self.morph = morph
self.if_offset = if_offset
self.device = torch.device(device)
self.to(device)
# self.bn = nn.BatchNorm2d(2 * kernel_size)
self.gn_offset = nn.GroupNorm(kernel_size, 2 * kernel_size)
self.gn = nn.GroupNorm(out_channels // 4, out_channels)
self.relu = nn.ReLU(inplace=True)
self.tanh = nn.Tanh()
self.offset_conv = nn.Conv2d(in_channels, 2 * kernel_size, 3, padding=1)
self.dsc_conv_x = nn.Conv2d(
in_channels,
out_channels,
kernel_size=(kernel_size, 1),
stride=(kernel_size, 1),
padding=0,
)
self.dsc_conv_y = nn.Conv2d(
in_channels,
out_channels,
kernel_size=(1, kernel_size),
stride=(1, kernel_size),
padding=0,
)
def forward(self, input: torch.Tensor):
# Predict offset map between [-1, 1]
offset = self.offset_conv(input)
# offset = self.bn(offset)
offset = self.gn_offset(offset)
offset = self.tanh(offset)
# Run deformative conv
y_coordinate_map, x_coordinate_map = get_coordinate_map_2D(
offset=offset,
morph=self.morph,
extend_scope=self.extend_scope,
device=self.device,
)
deformed_feature = get_interpolated_feature(
input,
y_coordinate_map,
x_coordinate_map,
)
if self.morph == 0:
output = self.dsc_conv_x(deformed_feature)
elif self.morph == 1:
output = self.dsc_conv_y(deformed_feature)
# Groupnorm & ReLU
output = self.gn(output)
output = self.relu(output)
return output
def get_coordinate_map_2D(
offset: torch.Tensor,
morph: int,
extend_scope: float = 1.0,
device: str | torch.device = "cuda",
):
"""Computing 2D coordinate map of DSCNet based on: TODO
Args:
offset: offset predict by network with shape [B, 2*K, W, H]. Here K refers to kernel size.
morph: the morphology of the convolution kernel is mainly divided into two types along the x-axis (0) and the y-axis (1) (see the paper for details).
extend_scope: the range to expand. Defaults to 1 for this method.
device: location of data. Defaults to 'cuda'.
Return:
y_coordinate_map: coordinate map along y-axis with shape [B, K_H * H, K_W * W]
x_coordinate_map: coordinate map along x-axis with shape [B, K_H * H, K_W * W]
"""
if morph not in (0, 1):
raise ValueError("morph should be 0 or 1.")
batch_size, _, width, height = offset.shape
kernel_size = offset.shape[1] // 2
center = kernel_size // 2
device = torch.device(device)
y_offset_, x_offset_ = torch.split(offset, kernel_size, dim=1)
y_center_ = torch.arange(0, width, dtype=torch.float32, device=device)
y_center_ = einops.repeat(y_center_, "w -> k w h", k=kernel_size, h=height)
x_center_ = torch.arange(0, height, dtype=torch.float32, device=device)
x_center_ = einops.repeat(x_center_, "h -> k w h", k=kernel_size, w=width)
if morph == 0:
"""
Initialize the kernel and flatten the kernel
y: only need 0
x: -num_points//2 ~ num_points//2 (Determined by the kernel size)
"""
y_spread_ = torch.zeros([kernel_size], device=device)
x_spread_ = torch.linspace(-center, center, kernel_size, device=device)
y_grid_ = einops.repeat(y_spread_, "k -> k w h", w=width, h=height)
x_grid_ = einops.repeat(x_spread_, "k -> k w h", w=width, h=height)
y_new_ = y_center_ + y_grid_
x_new_ = x_center_ + x_grid_
y_new_ = einops.repeat(y_new_, "k w h -> b k w h", b=batch_size)
x_new_ = einops.repeat(x_new_, "k w h -> b k w h", b=batch_size)
y_offset_ = einops.rearrange(y_offset_, "b k w h -> k b w h")
y_offset_new_ = y_offset_.detach().clone()
# The center position remains unchanged and the rest of the positions begin to swing
# This part is quite simple. The main idea is that "offset is an iterative process"
y_offset_new_[center] = 0
for index in range(1, center + 1):
y_offset_new_[center + index] = (
y_offset_new_[center + index - 1] + y_offset_[center + index]
)
y_offset_new_[center - index] = (
y_offset_new_[center - index + 1] + y_offset_[center - index]
)
y_offset_new_ = einops.rearrange(y_offset_new_, "k b w h -> b k w h")
y_new_ = y_new_.add(y_offset_new_.mul(extend_scope))
y_coordinate_map = einops.rearrange(y_new_, "b k w h -> b (w k) h")
x_coordinate_map = einops.rearrange(x_new_, "b k w h -> b (w k) h")
elif morph == 1:
"""
Initialize the kernel and flatten the kernel
y: -num_points//2 ~ num_points//2 (Determined by the kernel size)
x: only need 0
"""
y_spread_ = torch.linspace(-center, center, kernel_size, device=device)
x_spread_ = torch.zeros([kernel_size], device=device)
y_grid_ = einops.repeat(y_spread_, "k -> k w h", w=width, h=height)
x_grid_ = einops.repeat(x_spread_, "k -> k w h", w=width, h=height)
y_new_ = y_center_ + y_grid_
x_new_ = x_center_ + x_grid_
y_new_ = einops.repeat(y_new_, "k w h -> b k w h", b=batch_size)
x_new_ = einops.repeat(x_new_, "k w h -> b k w h", b=batch_size)
x_offset_ = einops.rearrange(x_offset_, "b k w h -> k b w h")
x_offset_new_ = x_offset_.detach().clone()
# The center position remains unchanged and the rest of the positions begin to swing
# This part is quite simple. The main idea is that "offset is an iterative process"
x_offset_new_[center] = 0
for index in range(1, center + 1):
x_offset_new_[center + index] = (
x_offset_new_[center + index - 1] + x_offset_[center + index]
)
x_offset_new_[center - index] = (
x_offset_new_[center - index + 1] + x_offset_[center - index]
)
x_offset_new_ = einops.rearrange(x_offset_new_, "k b w h -> b k w h")
x_new_ = x_new_.add(x_offset_new_.mul(extend_scope))
y_coordinate_map = einops.rearrange(y_new_, "b k w h -> b w (h k)")
x_coordinate_map = einops.rearrange(x_new_, "b k w h -> b w (h k)")
return y_coordinate_map, x_coordinate_map
def get_interpolated_feature(
input_feature: torch.Tensor,
y_coordinate_map: torch.Tensor,
x_coordinate_map: torch.Tensor,
interpolate_mode: str = "bilinear",
):
"""From coordinate map interpolate feature of DSCNet based on: TODO
Args:
input_feature: feature that to be interpolated with shape [B, C, H, W]
y_coordinate_map: coordinate map along y-axis with shape [B, K_H * H, K_W * W]
x_coordinate_map: coordinate map along x-axis with shape [B, K_H * H, K_W * W]
interpolate_mode: the arg 'mode' of nn.functional.grid_sample, can be 'bilinear' or 'bicubic' . Defaults to 'bilinear'.
Return:
interpolated_feature: interpolated feature with shape [B, C, K_H * H, K_W * W]
"""
if interpolate_mode not in ("bilinear", "bicubic"):
raise ValueError("interpolate_mode should be 'bilinear' or 'bicubic'.")
y_max = input_feature.shape[-2] - 1
x_max = input_feature.shape[-1] - 1
y_coordinate_map_ = _coordinate_map_scaling(y_coordinate_map, origin=[0, y_max])
x_coordinate_map_ = _coordinate_map_scaling(x_coordinate_map, origin=[0, x_max])
y_coordinate_map_ = torch.unsqueeze(y_coordinate_map_, dim=-1)
x_coordinate_map_ = torch.unsqueeze(x_coordinate_map_, dim=-1)
# Note here grid with shape [B, H, W, 2]
# Where [:, :, :, 2] refers to [x ,y]
grid = torch.cat([x_coordinate_map_, y_coordinate_map_], dim=-1)
interpolated_feature = nn.functional.grid_sample(
input=input_feature,
grid=grid,
mode=interpolate_mode,
padding_mode="zeros",
align_corners=True,
)
return interpolated_feature
def _coordinate_map_scaling(
coordinate_map: torch.Tensor,
origin: list,
target: list = [-1, 1],
):
"""Map the value of coordinate_map from origin=[min, max] to target=[a,b] for DSCNet based on: TODO
Args:
coordinate_map: the coordinate map to be scaled
origin: original value range of coordinate map, e.g. [coordinate_map.min(), coordinate_map.max()]
target: target value range of coordinate map,Defaults to [-1, 1]
Return:
coordinate_map_scaled: the coordinate map after scaling
"""
min, max = origin
a, b = target
coordinate_map_scaled = torch.clamp(coordinate_map, min, max)
scale_factor = (b - a) / (max - min)
coordinate_map_scaled = a + scale_factor * (coordinate_map_scaled - min)
return coordinate_map_scaled本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!