PCL点云处理之点云置平(拟合平面绕中心旋转到绝对水平)(二百二十七)
2023-12-18 23:51:46
一、什么是点云置平
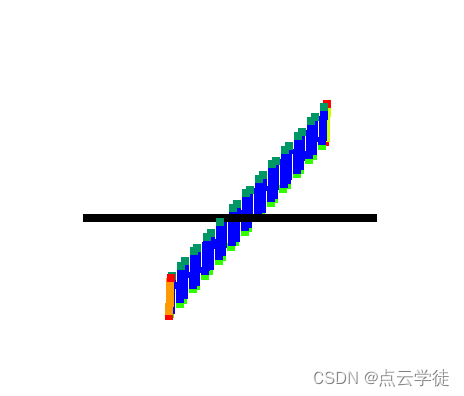
有时候,我们处理的点云平面并非位于水平面,而是位于某个任一三维平面上,而大多数算法又只能在水平面处理,或者水平面的点云处理是相对更简单的,所以我们需要做下面的这个处理,将点云旋转到绝对水平的位置,简称为点云置平
(有色点云为原始点云,黑色点云为置平后的点云,这里是从侧面观察,所以平面点云在视觉上形成了一条线。)
在之前的文章中也有这个内容,但当时的处理只能处理特殊情况,这种方法更简单普遍适用。
二、算法流程
第1步:加载点云数据 该代码使用 pcl::io::loadPCDFile 函数从一个PCD文件加载点云数据。
第2步:计算质心 接下来,代码使用 calculatePointCloudCentroid 函数计算点云的质心,然后使点围绕质心居中。
第3步:计算平面的法向量 使用 vv
文章来源:https://blog.csdn.net/weixin_44329757/article/details/135073461
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!