APM32F035有感矢量控制方案
一、先来几句废话
????????首先这两年公司越来越多的开始使用国产的MCU,用过GD32、AT32、APM32等等,目前稳定使用的是APM32,包括身边朋友工作室,也开始从TI、STM、NXP换成APM32。上个月有幸拿到APM32F035电路控制板,非常感谢面包板社区提供的这个机会。一直很忙,刚好今天要周末了,来测试一下。之前可能通信方面做得比较多,很少接触电机控制,刚好朋友有一个项目要用,借这个机会,一起搞定。看看后面能否直接用这个方案。
二、电路板介绍
????????先来一张电路板照片(还是挺好看的,黑色的电路板感觉颜值比较高)
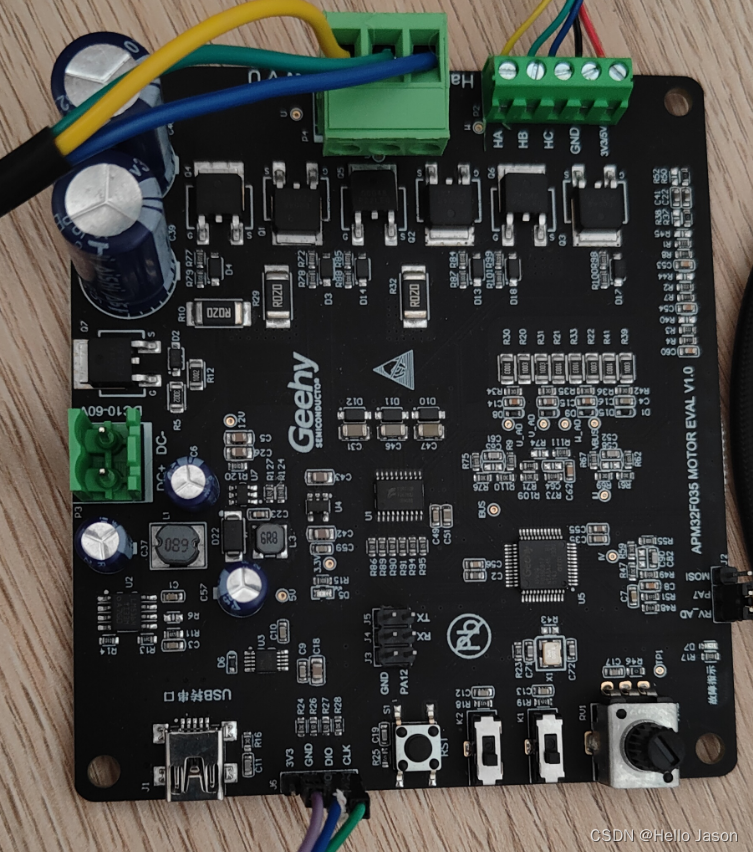
?硬件框图

- 气参数:12~72VDC 宽电压输入,最大功率 100W
- 支持电机类型:BLDC,PMSM
- 支持编码器类型:霍尔,光电,磁编码器
- 通讯接口:SCI,SPI,I2C,CAN
- 电流采样方式:单 / 双电阻采样,三相反电动势采样
????????硬件整体来说中规中矩,使用Gate driver + MOSFET来驱动电机。配合一些霍尔传感器检测电路和相电流检测,基本上就是一个电机控制的最基本部分。核心MCU用的是极海自己的APM32F035,APM32F035作为一款32位FoC矢量控制MCU,内置Vector Computer多种专用数学运算加速器,提供整套FoC控制算法支持。该款新品具有优异的高效运算与处理速度,丰富的模拟与连接特性赋予电机更多的新功能属性。

三、软件方面介绍
? ? ? ? 软件方面,极海提供了多种电机控制方案,满足不同的使用需求,如下图


??????
????????此项目整体代码架构主要可划分为 4 层,用户层、外设驱动层、电机控制驱动层以及电机算法层,具体功能描述如下:
- 用户层( 用户层(USER 层)
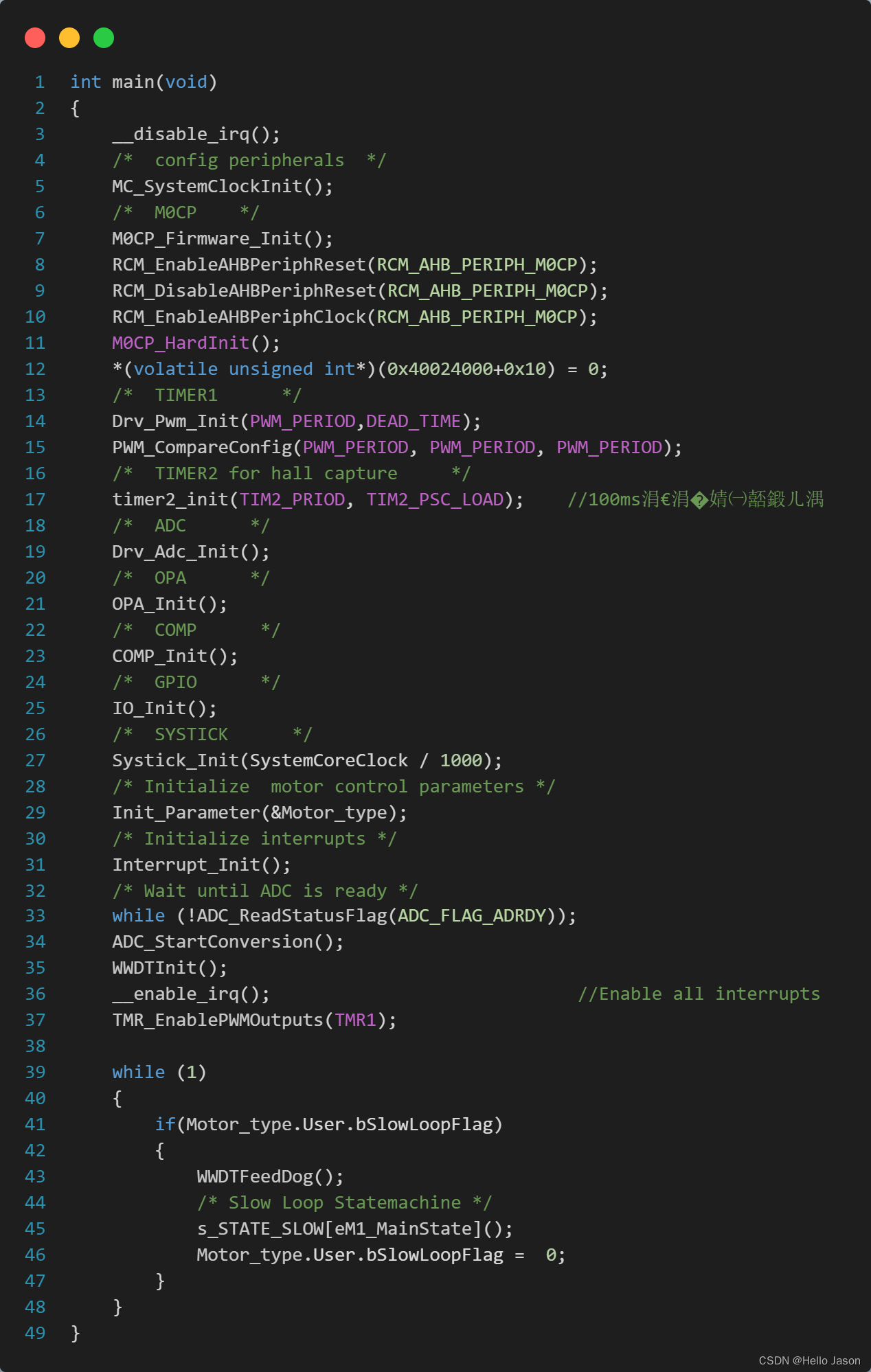
main.c:主函数入口,负责初始化电机参数、底层外设、中断优先级、while 循环及低速状态机
环路的切换;
apm32f035_int.c:所有的中断处理函数,重点包括捕获中断函数、ADC 中断处理函数;
user_function.c:包括电机参数的初始化配置、参数复位等处理函数;
parameter.h:包括了所有的需要配置参数信息;
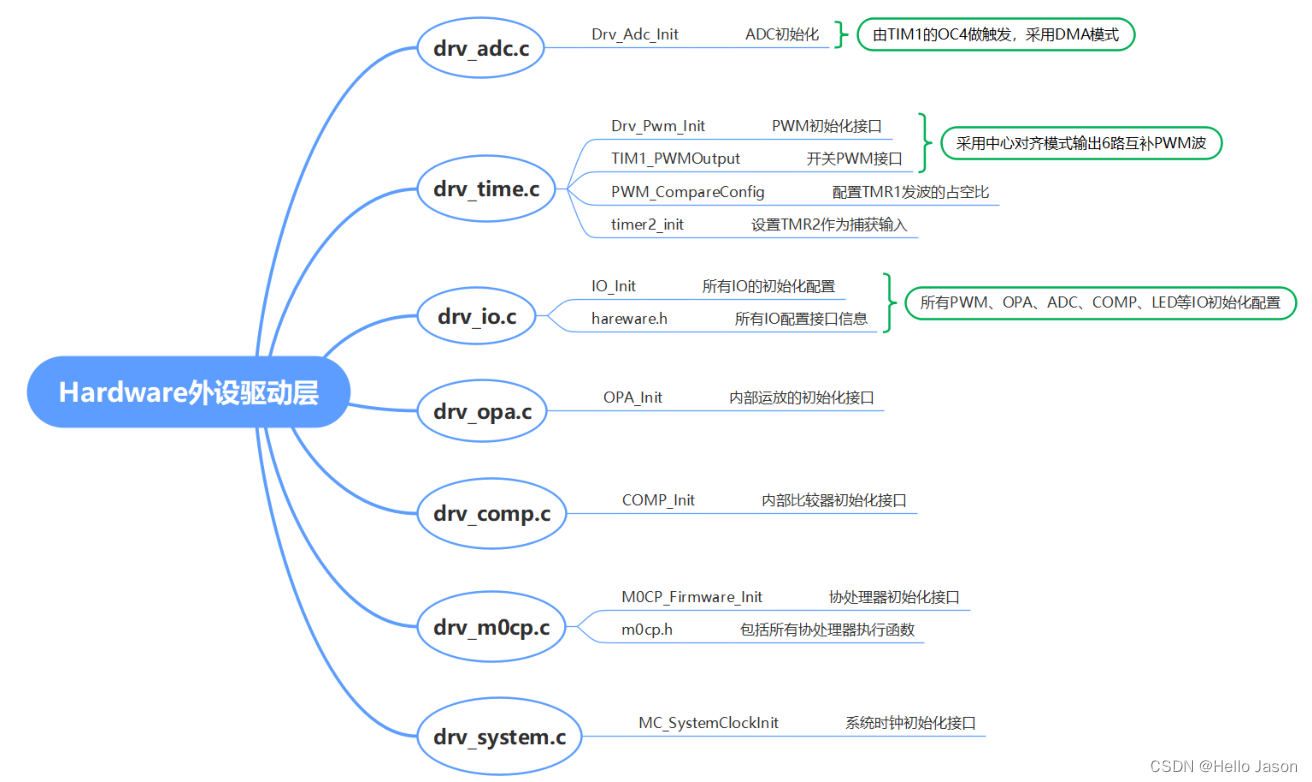
- 外设驱动层( 外设驱动层(HARDWARE 层)
外设驱动层主要负责 APM32F035 芯片的外设驱动函数及配置,主要涉略包括 GPIO、PWM、
ADC、OPA、COMP、M0CP 协处理器等,具体如下图所示。
- 电机控制驱动层(MOTOR_CONTROL 层)
电机控制驱动层主要负责电机的控制运行逻辑及核心处理算法调用,具体如下图所示。

- 极海电机算法层( 电机算法层(Geehy_MCLIB 层)
电机算法层包括坐标变换、矢量控制等相关函数,数学库,HALL 角度估算等库函数。
???我打算使用的是有感的FOC控制方案,所以我们就APM32F035_Lv_HallFOC_V2.2.zip提供的源代码进行测试.打开工程(基于MDK5)如下:
状态机介绍 状态机介绍
本案例中采用了主状态机嵌套子状态机的结构,如下所示:
四个主状态:INIT、STOP、FAULT、RUN;
同时主状态 RUN 的六个子状态:run-calib、run-ready、run-align、run-spin、run-freewheel。
对主状态机的描述如下:
Fault:当系统有错误发生时一直处于此状态,直到错误的标志位被清除。而后会延时一段时间,然后从 Fault 状态跳转到 STOP 状态等待起动命令。
Init:此主状态执行变量初始化。
Stop:系统完成初始化等待速度命令。此状态内 下关闭 PWM 输出。
Run:当在运行状态时,若有 Stop 指令下发,便会执行系统停止运行操作。当运行在 Run 状态时,其子状态会相应被调用并执行:
Run-Calib:可以执行电流偏置 ADC 自校准功能。执行完此状态后系统将切 Ready 状态,同时
禁止 PWM 输出。
Ready:使能 PWM 输出,同步采样电流,并执行异常状态检查。
Align:执行采样电流,调用预定位算法,同时更新 PWM。在指定时间内执行态,同时采样直流
母线电压并滤波处理。
Spin:采样电流,调用观测器估计转子转速和位置,调用相应算法,更新 PWM,电机开始切入
闭环运行。
Freewheel:使能 PWM 输出,并采用短接制动的方式进行停机,由于转子惯性,需等待到电机
停止运行后在进行状态的切换,进而切换到 Ready 状态。如果有错误发生则将进入 Fault 状态。
四、电机调试
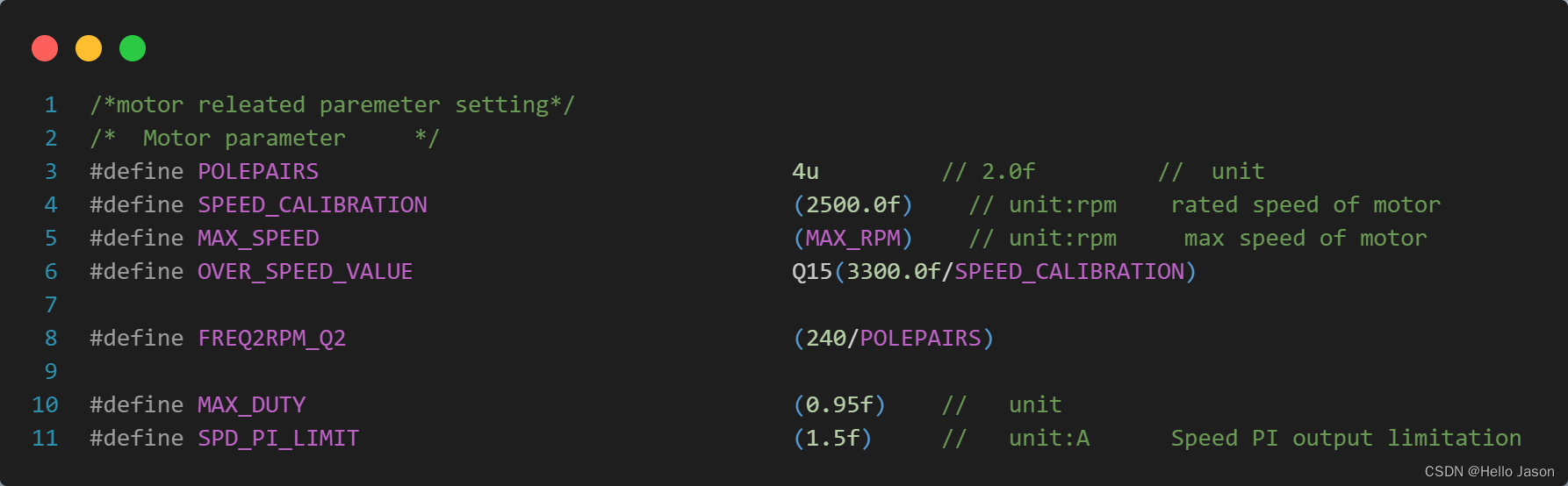
1、电机参数配置?
电机我使用的是硬石开发板配套的4对极直流无刷电机
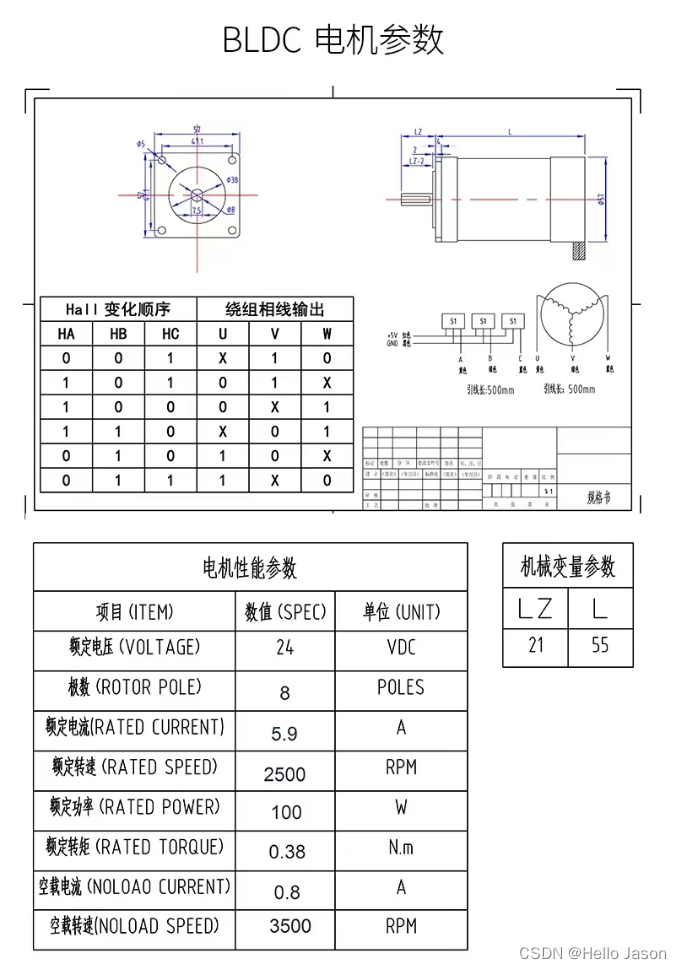
根据官方提供的方案调试介绍,因此需要核对电机的极对数、额定转速、限制电流(结
合电机的功率考虑)、定标转速(结合额定转速评估)等。如下图所示。
2、电流内环的 PI 参数进行整定确认
????????在 Align 状态中进行调试,调节 DQ 轴下的电流环 PI 参数(如下图所示,一般 DQ 轴采用一
样的 PI 参数),类似其中的 Q 轴,通过给定 Iq_cmd(可以直接给到值或者采用斜坡给定的方式
设定一定加速度及数值),通过观察 Vq 的输出是否能快熟稳定、以及 Iq_cmd 及实际的 Iq 波形数
据是否能跟随上,判断当前的 PI 参数是否合适。
3、HALL 角度自检
????????当电流内环 PI 参数已经合适时,此时说明可以使用预定位功能,则开启 HALL 相序的自检功能。还是在“parameter.h”参数配置文件中,打开“HALL_PHASE_TEST”宏参,进行 HALL相序的自检功能,在此先介绍下 HALL 相序的作用,HALL 的相位角度差是 60°,即其可以输出六个角度点,类似按照正转 CW 的方式 HALL 值输出如 2-6-4-5-1-3。(注:可以先自行测试HALL 的相序顺序是否与程序中给的一致,可以通过手动让电机其转动一圈看看实际读到的 hall值,确认 hall 正转与反转的顺序,并将对应的 hall 相序进行核对,类似读出是 6-4-5-1-3-2,与上述设定顺序一致则无需修改,而若出现类似 6-4-1-5-2-3 这种与程序中的顺序不相符的,将该顺序填入 user_function.c 中的 u8CW_Hall_Value 与 u8CCW_Hall_Value 数组列表中,同时也需要对应填写下 CW_hall_table 与 CCW_hall_table 数组列表。u8CW_Hall_Value[6]:表示实际的霍尔序列,注意霍尔序列与角度序列的对应关系;CW_hall_table[8]:前一个位置的霍尔值序列,例如程序内 hall:1 的前一个位置是 hall:5,CW_hall_table[1] = 5,hall:2 的前一个位置是 hall:3,CW_hall_table[2] = 3以此类推:u8CW_Hall_Value[6]={ 1,3,2,6,4,5},对应 CW_hall_table[8]={ 0,5,3,1,6,4,2,0};u8CW_Hall_Value[6]={ 2,3,1,6,4,5},对应 CW_hall_table[8]={ 0,3,5,2,6,4,1,0})。
其次,实际 HALL 传感器的安装位置与电机对应的机器角度间是会有安装角度偏差的,即机器角度偏差角,此时 HALL 相序的自检功能就是为了计算出该偏差角,并把HALL 值对应的实际角度一一匹配上。如下图所示,开启“HALL_PHASE_TEST”宏参后进入调试模式,观察“stc_align_hall”该结构体的相关成员变量,配置函数“Align_HallCal_Phase_Init”与“Align_HallCal_Phase”实现,核心参数修改主要在于定位时间以及定位 Iq 电流的设定,以及偏移角度的设定(若检测角度异常可适当调节该值,常用推荐 0“0°”或者 5461“30°”的偏移角度)。如“stc_align_hall”中的“u8Dir”表示方向,
s16CW_arr_HallPhase_Cal 与 s16CCW_arr_HallPhase_Cal 是最终生成计算获取 HALL 相序角度表,需将其填入 user_function.c 中的“s16CW_arr_HallPhase”与“s16CCW_arr_HallPhase”数组列表中。
五、最后效果
APM32F035 有感FOC电机控制
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!