超维空间S2无人机使用说明书——43、将雷达定位信息通过mavros传给飞控
2023-12-24 18:40:51
引言:在实现三维雷达定位后,还需要将定位数据传给飞控,这样无人机才能实现切入定点模式。无人机在有了位置以后,才能实现精确的闭环控制
简介
采用fast-lio定位算法,通过修改源码直接发布定位出来的位置信息和速度信息。在此基础上再经过坐标转换,将ROS下的ENU坐标系里程计信息传给飞控需要的NED里程计信息。
注意:仿真和实物对于本节的操作是一样的,不再单独写一篇说明
硬件:宇树雷达4DLiDAR L1 PM,ROS主控Jetson orin nano 8G
环境:ubuntu20.04,ros-noetic
步骤一:启动mavros通信节点,实现ROS和飞控的双向通信
roslaunch robot_bringup px4.launch
等待出现如下界面表示通信成功,否则请先确保通信正常
步骤二:启动三维雷达
roslaunch unitree_lidar_ros run_without_rviz.launch
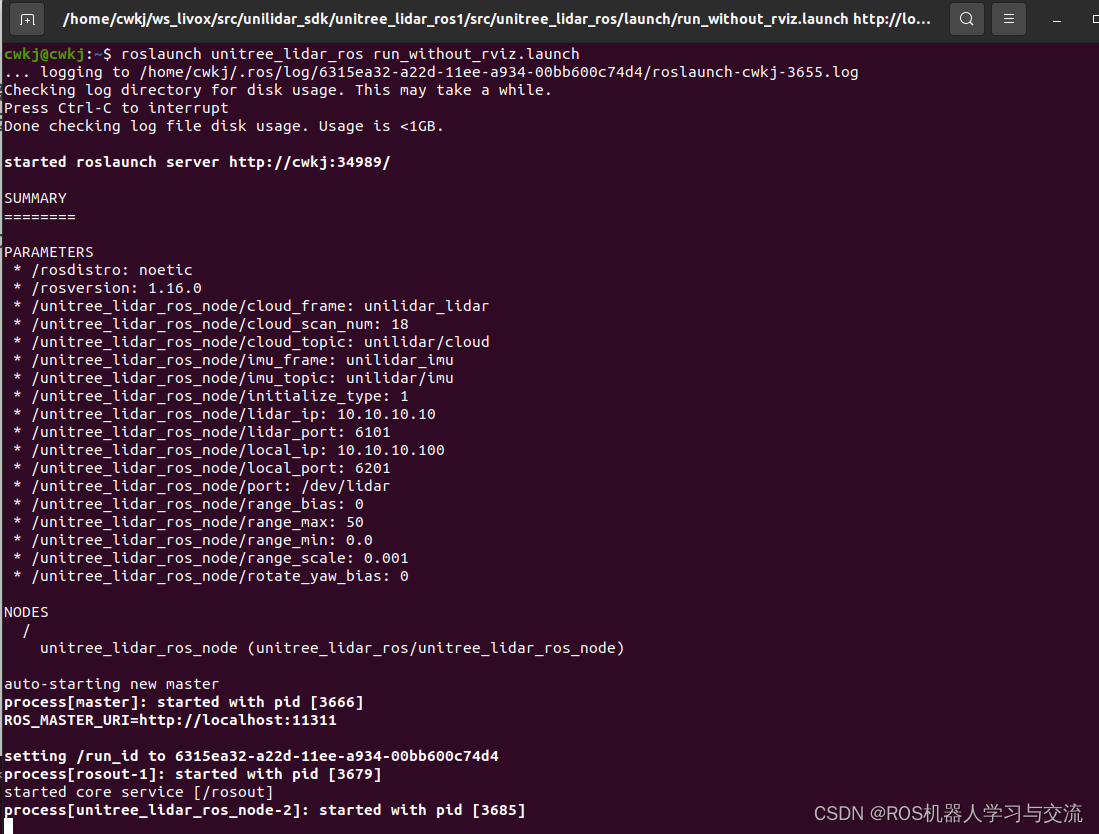
注意:如果报错,请检查是否已经对雷达USB口进行绑定
步骤三: 启动fast-lio定位算法
roslaunch fast_lio mapping_unitree.launch
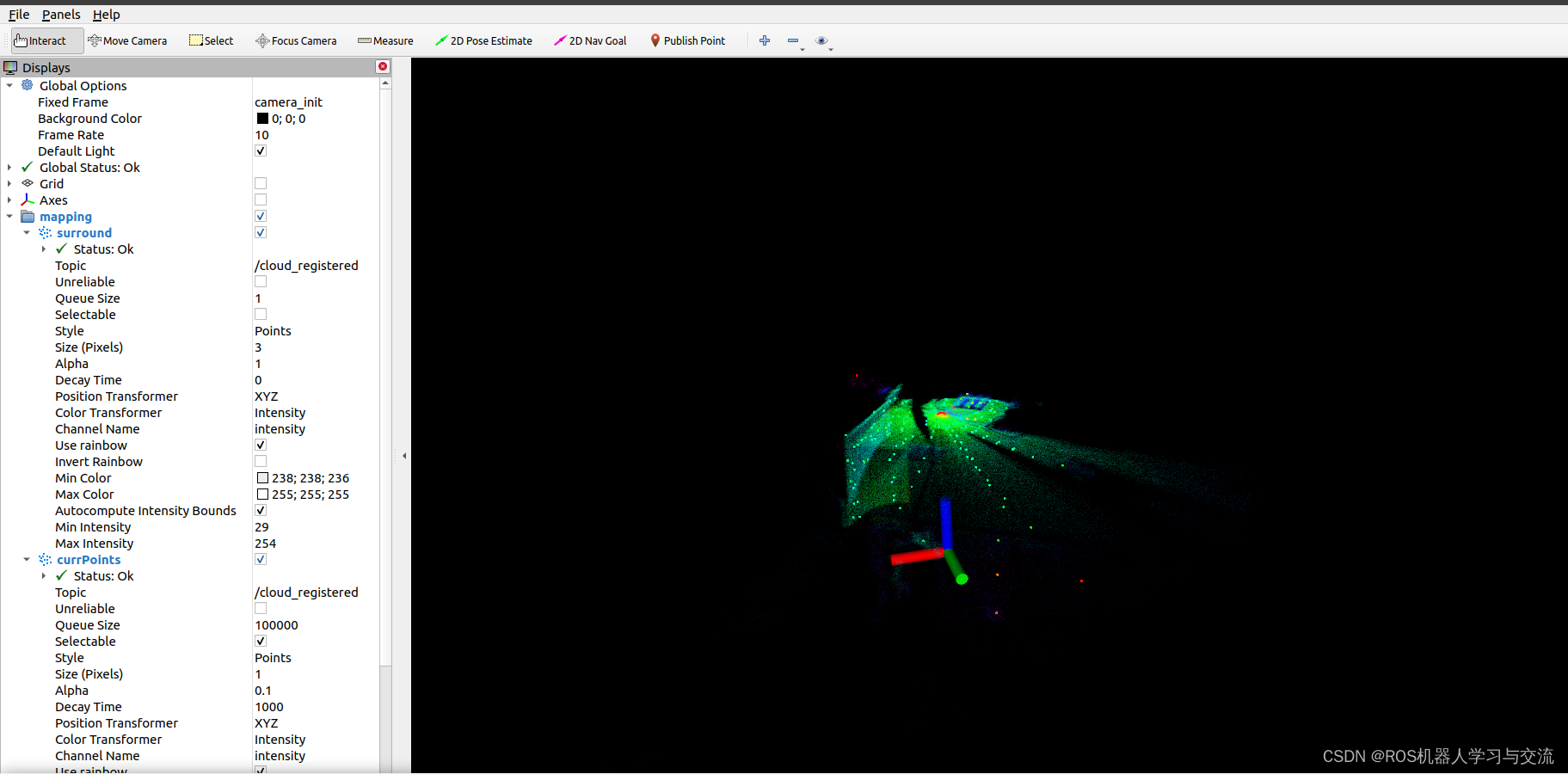
等待出现如下界面,表明启动成功

同时会自动开启RVIZ,如下
步骤三:查看定位出来的里程计信息
(1)、查看里程计话题名称
rostopic list
话题/Odometry就是雷达定位出来的里程计话题
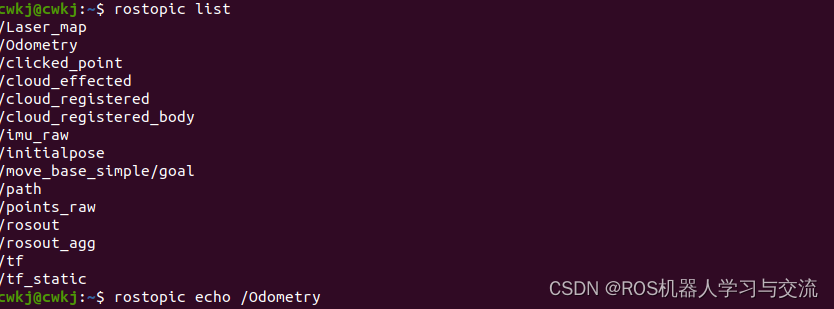
(2)、打印里程计数据
rostopic echo /Odometry

步骤四:此时查看话题mavros/vision_pose/pose
rostopic hz /mavros/vision_pose/pose

可以看到,此时这个话题是没有发布和订阅数据的,底层飞控没有拿到雷达定位出来的数据
步骤五:启动雷达位置转换节点
rosrun lidar_to_mavros lidar_to_mavros
注:这个节点作为中间转换节点,一般不需要打印日志信息,只要启动后没有红色报错就可以认为是正常的,如下如所示

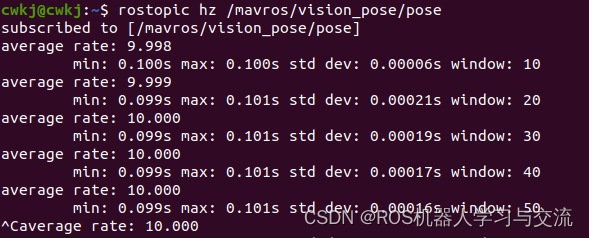
步骤六:重复步骤四,查看对应的话题信息
查看姿态信息发布的频率,从下图可以看出,话题已经按照10Hz的频率在发布了
rostopic hz /mavros/vision_pose/pose
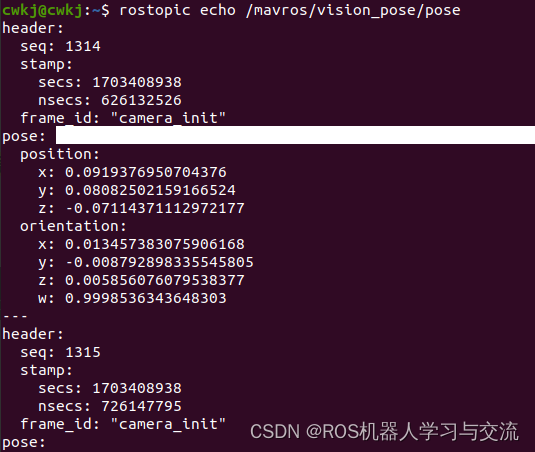
查看姿态信息发布的数据信息,从下图可以看出,包含了位置和姿态信息
rostopic echo /mavros/vision_pose/pose
总结:将雷达定位出来的里程计信息传给底层飞控是实现无人机稳定飞行的基础,可以参考其他相关教程,通过地面站再次检查确认无人机是否接收到了可靠的定位信息。否则容易造成炸机
建议,在无人机的相关基础熟悉了以后再进行中级教程的学习
文章来源:https://blog.csdn.net/qq_35598561/article/details/135183590
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!