飞行机械臂设计
2024-01-09 20:22:06
#这个课题是我的毕业设计,主要采用adams软件和matlab/simulink进行联合仿真。
? 四旋翼无人机自身具有独特的优势,在无人机上增加机械臂,整个 机体系统相当于一架空中行动自如的空中机器人,可以适应更多的应用场合,能够实现空中抓取,运输载荷,巡航监视等任务。同时由于飞行 器与机械臂互相耦合的特性,飞行机械臂系统的运动难以控制。针对于 此,本文研究飞行机械臂的建模和控制方法。
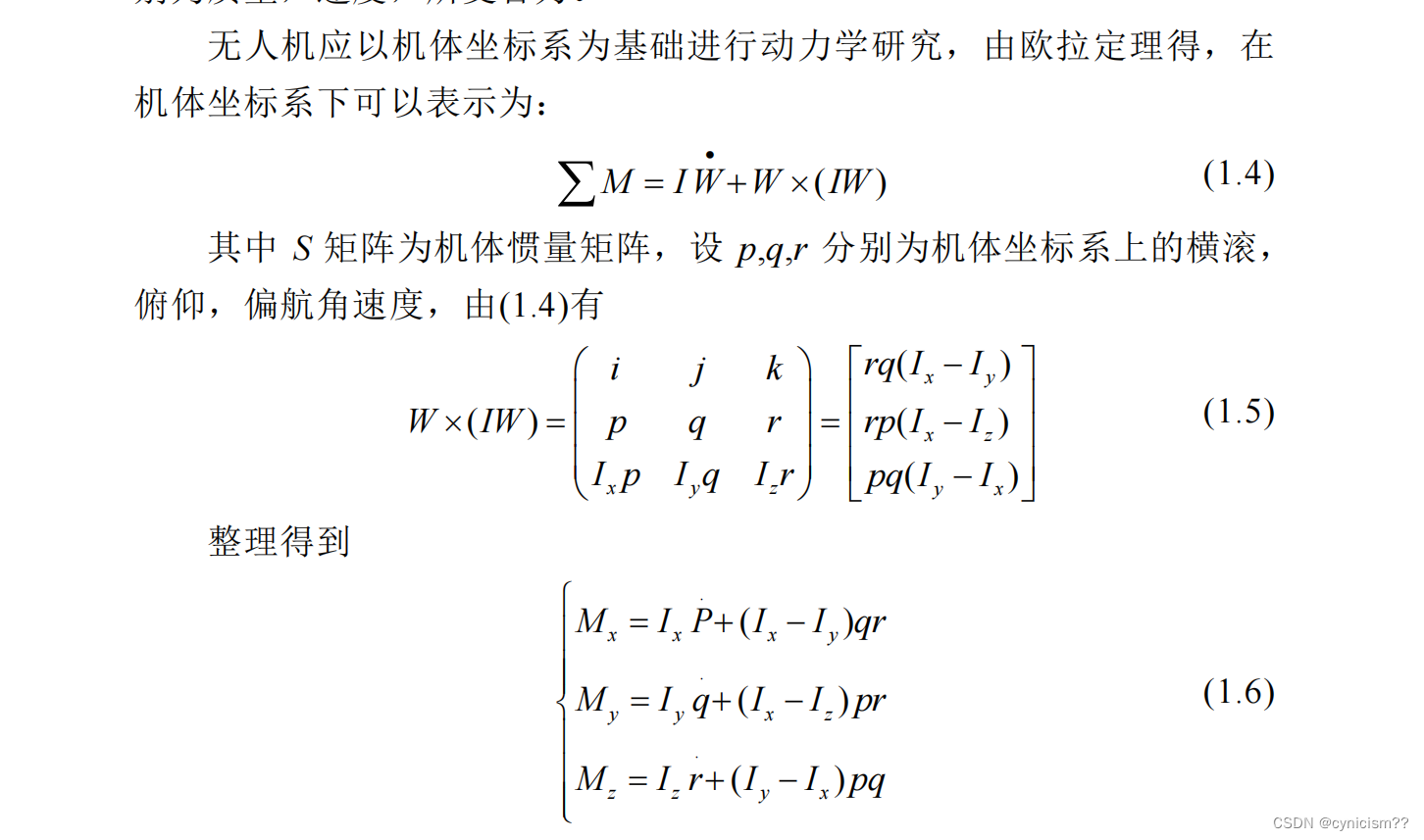
? 首先分析四旋翼无人机的运动学与动力学,建立模型,通过在无人 机上加入机械臂,利用牛顿
-欧拉方程建立飞行机械臂系统的机理方程。
? 其次通过
SolidWorks 建立飞行机械臂的物理模型,将其导入到 ADAMS 软件中,设置材料、力矩和驱动函数,搭建输入输出通道,导 出到
Simulink
中进行联合动力学仿真。
? 最后在 MATLAB/Simulink 仿真环境下,设计飞行机械臂控制律并进 行仿真,实现无人机在三个坐标轴方向的运动控制。依次对建立的飞行 机械臂系统模型进行控制系统的搭建,利用
PID 控制器进行机体的控制, 分析相应的输出曲线以及
ADAMS 动画仿真演示,验证所设计的控制器 的效果。

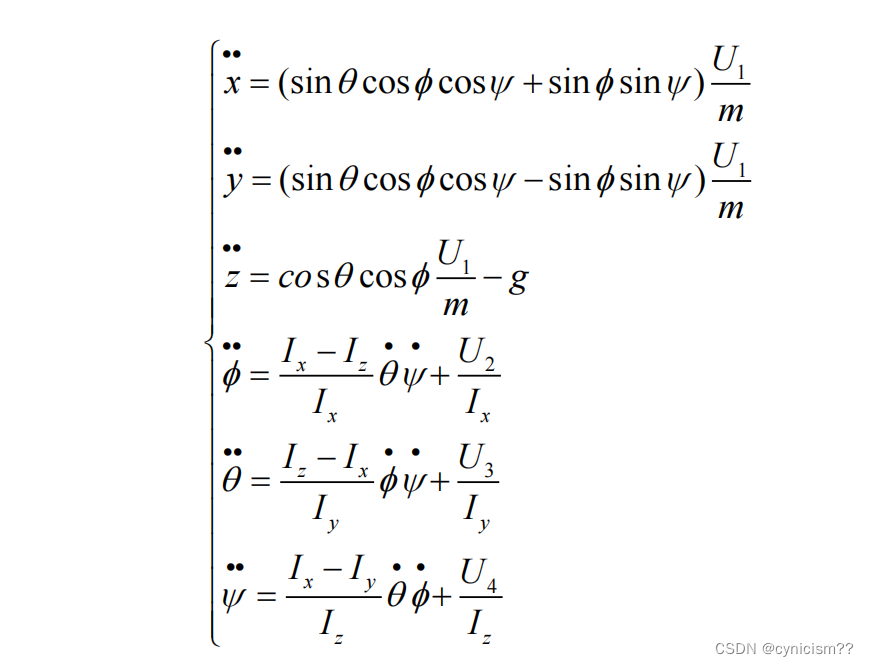
最终推导无人机模型为:

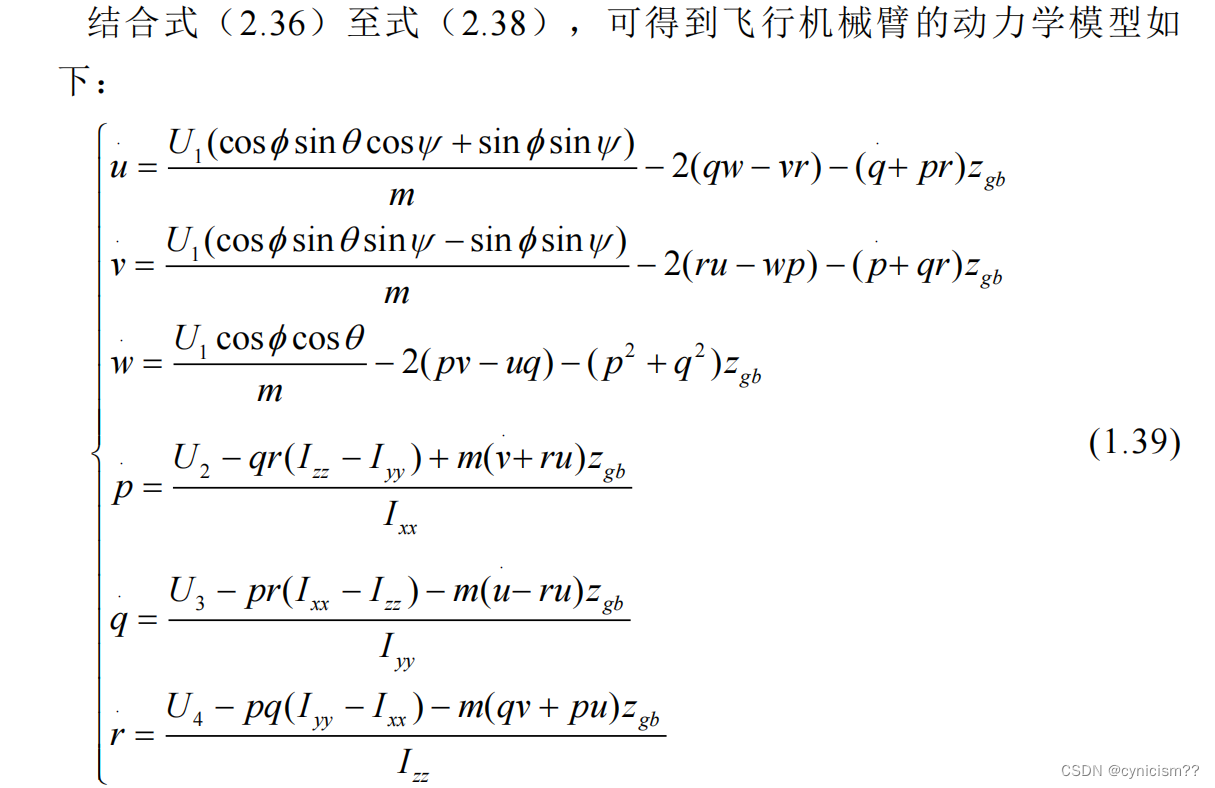
经过假设,飞行机械臂机理模型为:
机械系统动力学自动分析( Automatic Dynamic Analysis of Mechanical Systems
)简称
ADAMS
,是美国
MSC 公司开发的虚拟样 机分析软件。
ADAMS 软件通过交互图形环境和零件库,约束库,力库来建立一个 完整的参数化力学系统的几何模型,它的求解程序是利用拉格朗日方程 法求解多刚体系统的动力学方程,并对其进行静力学、运动学、动力学 分析,并输出位移、速度、加速度和反作用曲线。
ADAMS 软件可以对系统性能、运动范围、碰撞检测、峰值载荷以及有限元输入载荷的计算等进行模拟。
ADAMS 的主要功能模块包括基础模块、扩展模块、接口模块、专业领域模块和工具包。用户既能利用通用模组模拟普通机械系统,又能利用专门的模组,对具体的工业应用问题进行快速、高效的建模和模拟。
本文中主要使用
ADAMS
软件包含的用户界面模块
ADAMS/View , 求解器模块
ADAMS/Solver
,后处理模块
ADAMS/PostProcessor 以及线 性化分析模块
ADAMS/Linear
,高速动画模块
ADAMS/Animation
等。
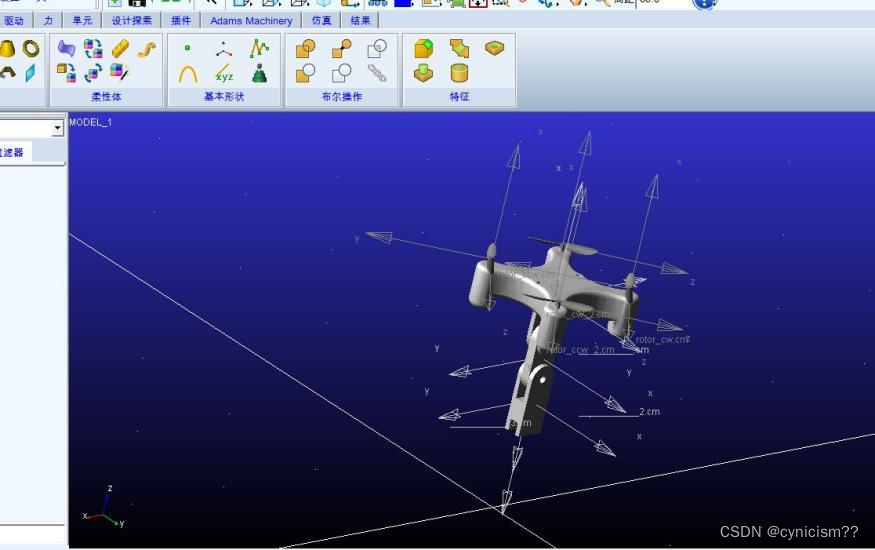
将机械臂物理模型建立为:

ADAMS
软件支持外部模型的导入,将建立好的
SW 文件导入到 ADAMS
界面中如图
?
所示。
将系统的各个部件首先用固定副连接起来后,对每个旋翼设计旋转 副,其中部分设计如图

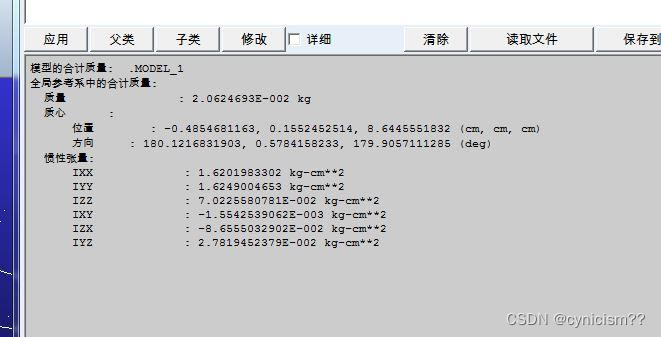
物理模型的参数如图
ADAMS
与
Simulink
联合动力学仿真
利用
ADAMS
软件建立机械系统后,将系统导入到
Simulink 来设计 控制系统,首先在
ADAMS 中对于所输出的机械系统进行单元设置,设 计四个力矩单元,三个角度单元,三个角速度单元,三个线速度单元。
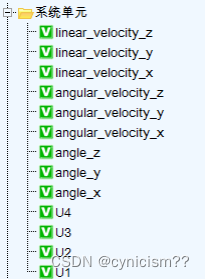
搭建系统数据输入输出通道,以力矩为输入数据,角度,角速度, 线速度为输出数据单元,如图

将机械系统输出到
MATLAB
中,设置输入与输出

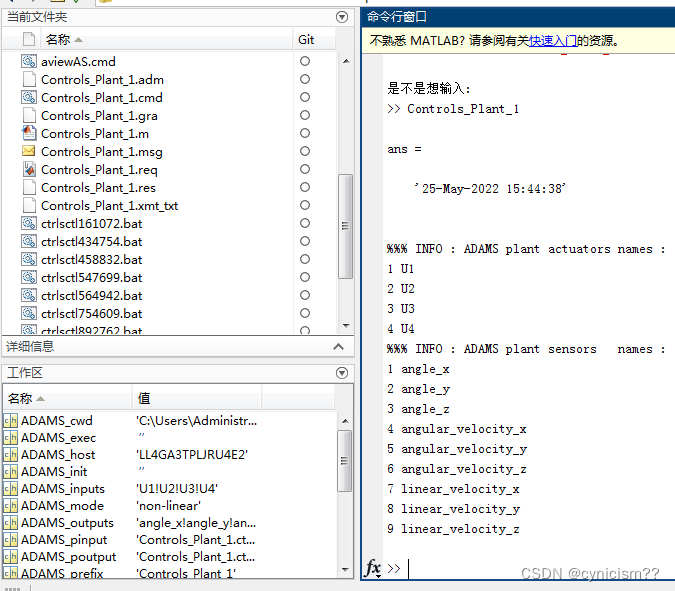
导出后在MATLAB中执行 ADAMS_sys_命令,再输入机械系统名称,调出机械系统模型与数据集,如图
在
Simulink
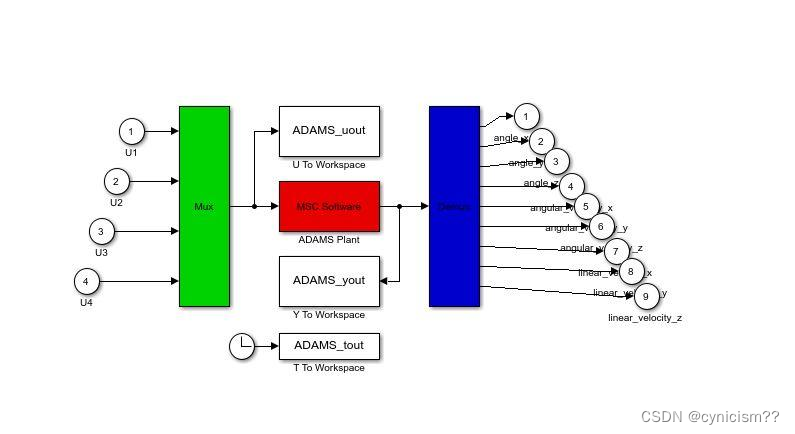
中打开
ADAMS
模型,如图

其中封装如图
将模型复制,新建新的仿真图,设计输入输出示波器,如图
至此,联合仿真模型搭建完毕。
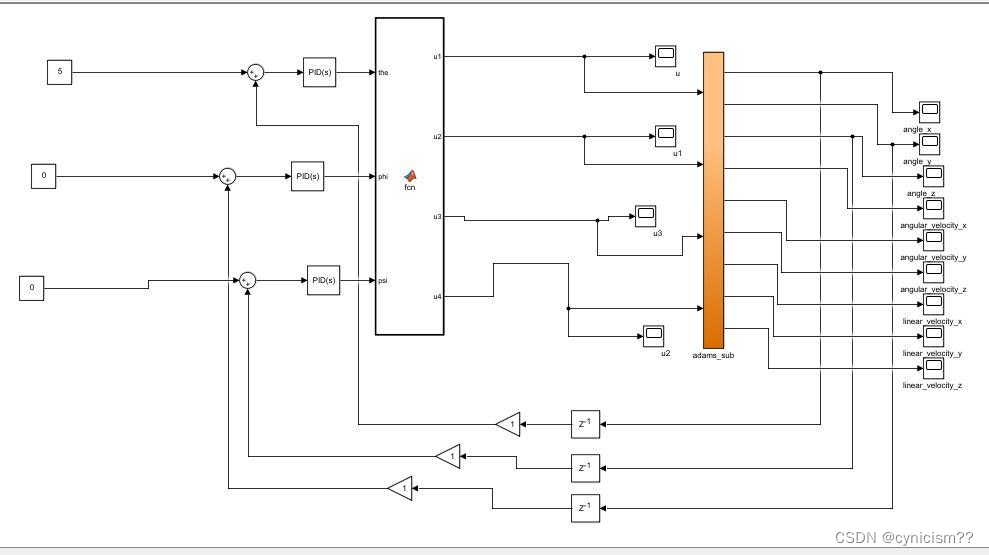
#无人机机理模型simulink仿真搭建
机理模型导入
Simulink
的函数模块如图 4-8 所示,可见输入为 U1,U2,U3,U4,分别对应总力矩,俯仰力矩,翻滚力矩,偏航力矩,控制 量为俯仰角,翻滚角,偏航角。而系统输出有九个通道,分别为三个欧
拉角,三个方向的角速度,三个方向的线速度。

在
Simulink 中,将系统参数输入到模型中,将三个角度作为控制量, 搭建闭环负反馈系统,输入期望达到的数值,经过
PID 控制器后进入系 统,如图
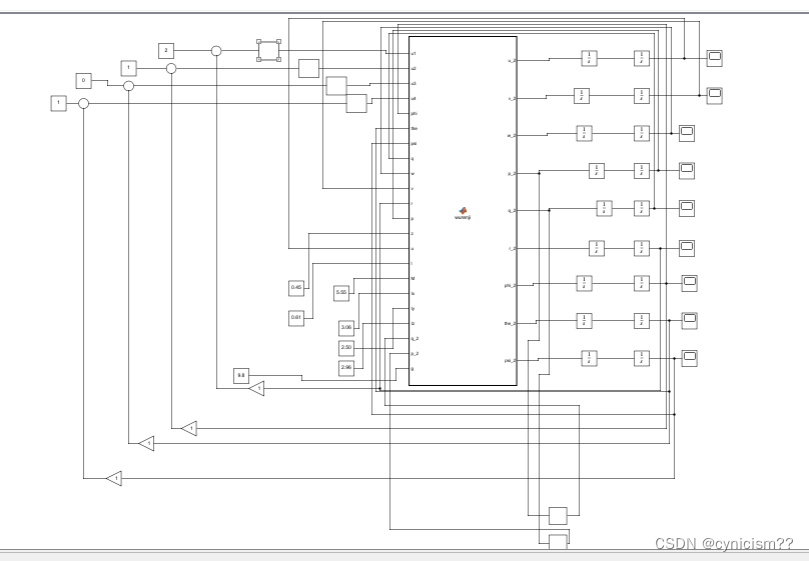
对于四旋翼无人机的模型进行控制系统的搭建,在动力学建模 的前提下将机理模型简化后导入到
Simulink 中进行仿真,设计 PID 控制 器参数进行仿真。在经过一系列调整后,飞行器的姿态与运动被良好的 控制,为之后飞行机械臂的研究奠定基础。其后对飞行机械臂系统的机 理模型和基于 ADAMS 的物理模型进行了控制系统的搭建,对于机理模 型,设计了三个输入通道,分别是俯仰力矩,翻滚力矩与偏航力矩,控 制量为翻滚角,俯仰角,偏航角。经过调节 PID 控制器的参数,最终对 飞行机械臂的姿态得到了良好的控制效果。对于物理模型,首先在 ADAMS 软件中调节力矩验证飞行机械臂的六种运动姿态,其次导出到 Simulink 中进行控制系统设置,由于需要解耦,因此观察力矩的输出来 验证控制效果,最终在
ADAMS 软件动画演示中可以直观地看出。
文中simulink模型见
GitHub - promising76/Flight-robotic-arm-model
文章来源:https://blog.csdn.net/coldmood77/article/details/135401088
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!