《密集环境下编队飞行的分布式集群轨迹优化》论文解读一
2023-12-15 10:33:44
1.摘要

?本文的主要创新点在于提出了一个可微度量,可用于量化编队队形之间的相似性,该度量公式可以被引入决策规划的经典范式(优化框架),并利用多项式进行时空联合规划。同时这个框架能够平衡好避障与编队队形保持两个重要问题。
| 英文 | 中文 |
|---|---|
| aerial swarms | 空中机器人集群 |
| prescribed formation | 规定队形 |
| however,the associate XXX lack the capability of | 然而相关XXX缺少XXX能力 |
| To address this deficiency, we present XXX that ensures | 为了解决这种不足,我们提出XXX确保 |
| a novel XXX is proposed to | 一个新颖的XXX被提出 |
| overall | 总体 |
| optimization framework | 优化框架 |
| spatial-temporal planning | 时空规划 |
| polynomial trajectories | 多项式轨迹 |
| XXX is also incorporated,so that XXX can be handled | XXX也被纳入,以便XXX被解决 |
| formation preservation | 编队保持 |
| To validate the efficiency of our method, we conduct benchmark comparisons with other cutting-edge works. | 为了验证我们的方法的有效性,我们与其他前沿作品进行了基准比较 |
| Integrated with XXX,the proposed method demonstrate | 与XXX结合,提出的方法证明了 |
| robustness | 鲁棒性 |
| real-world experiments | 真实世界的实验 |
| obstacle-rich surroundings | 充满障碍物的环境 |
| We will release the source code for the reference of the community | 我们将发布源代码供社区参考 |
2. 一个可微的形式相似性度量
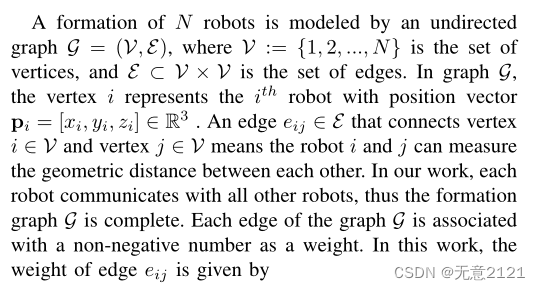
?这是机器人集群或者机器人编队中经典的定义
一个机器人编队可以被建模为一个无向图,每个机器人可以与其他机器人通信,因此图是完备的,图中edge的值是两个机器人之间的距离的平方

A是邻接矩阵,D是度矩阵,L是拉普拉斯矩阵,同时对其进行归一化

拉普拉斯矩阵包含整个图结构的信息,为了实现预期的编队队形,可以通过归一化过后的拉普拉斯矩阵与desire的差来衡量,这种度量方法对于编队的平移与旋转是恒定的

度量对于每个机器人的位置是可微的,因此通过链式法则可以得到上式(高飞老师的文章大多数在研究解析的方法,因此很多数学公式都是利用链式法则对多变量、矩阵、向量进行求导,不懂的需要恶补一下相关知识)


文章来源:https://blog.csdn.net/weixin_65089713/article/details/135007035
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!