MIT_线性代数笔记:第 25 讲 对称矩阵和正定性
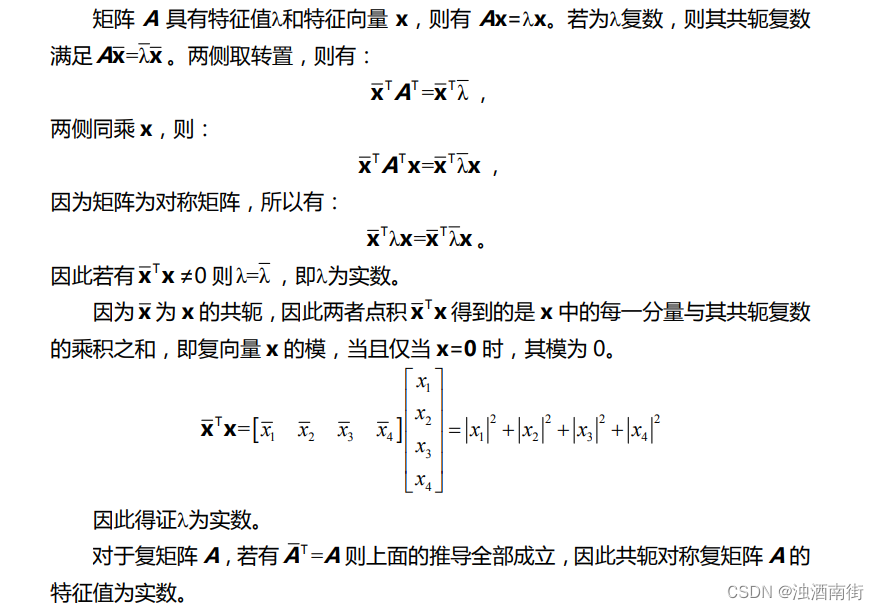
对称矩阵是最重要的矩阵之一,其特征值为实数并且拥有一套正交特征向量。正定矩阵的性质则更好。
对称矩阵 Symmetric matrices
包含特殊性质的矩阵,例如 Markov 矩阵,其特征值和特征向量往往拥有一定特性。对称矩阵 A = A T A=A^T A=AT的特征值为实数,具有完全正交的特征向量。这里的“有”,是指可以选出一套完全正交的特征向量(例如在重特征值条件下,可能存在一个平面内向量都可以作为特征向量)。
如果 A 具有 n 个线性无关的特征向量,可以对角化得到 A = S Λ S ? 1 A=SΛS^{-1} A=SΛS?1。而对于对称矩阵, A = Q Λ Q ? 1 = Q Λ Q T A=QΛQ^{-1}=QΛQ^T A=QΛQ?1=QΛQT,其中 Q 为正交矩阵,列向量为标准正交基,这个公式本身还显示了矩阵的对称性。矩阵能够进行这种分解,在数学上称为“谱定理”(spectral theorem),将特征值视为“谱”,在物理上称之为“主轴定理”。
实特征值 Real eigenvalues
对于对称矩阵,
A
=
Q
Λ
Q
?
1
=
Q
Λ
Q
T
A=QΛQ^{-1}=QΛQ^T
A=QΛQ?1=QΛQT,可以写作:
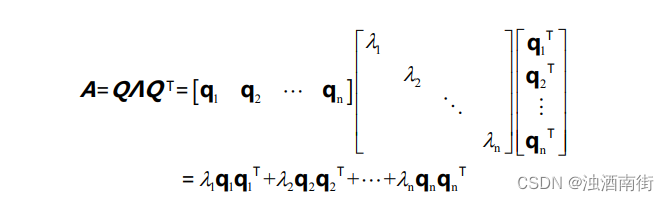
矩阵是 q k q k T = ( q k q k T / ( q k T q k ) ) q_kq_k^T=(q_kq_k^T/(q_k^Tq_k)) qk?qkT?=(qk?qkT?/(qkT?qk?))是朝向向量 q k q_k qk? 的投影矩阵,所以每一个对称矩阵都是正交投影矩阵的线性组合。这是理解谱定理的另一种方法。
当确认矩阵特征值为实数后,下一个要考虑的问题就是它是正还是负数,因为这影响着微分方程中体系的稳定与否。但是对于大型矩阵,通过计算 ∣ A ? λ I ∣ \begin{vmatrix} A-λI \end{vmatrix} ?A?λI? ? 得到特征值进行判定难以实现,即使用 MATLAB 求解,结果也不一定可靠,但 MATLAB可以得到矩阵的主元,而对称阵的主元中正负数的个数与特征值相同,即正主元的数目等于正特征值的数目。
矩阵 A+bI 的特征值比矩阵 A 的特征值大 b,可以通过 A+bI 的主元来了解矩阵 A 的特征值与 b 的大小关系,因此利用这个性质可以估计特征值的状态。
正定矩阵 Positive definite matrices
正定矩阵 A 是特征值都为正数的对称矩阵。它的主元也均为正数。
例如矩阵 A= [ 5 2 2 3 ] \begin{bmatrix} 5&2\\2&3 \end{bmatrix} [52?23?] 。主元为 5 和(detA)/5=11/5。主元都为正数,且本身为对称矩阵,因此 A 是正定矩阵。计算其特征值为: ∣ A ? λ I ∣ = λ 2 ? 8 λ + 11 = 0 , λ = 4 ± 5 \begin{vmatrix} A-λI \end{vmatrix} =λ^2-8λ+11=0,λ =4±\sqrt{5} ?A?λI? ?=λ2?8λ+11=0,λ=4±5? 。
因为主元和特征值都是正的,可以知道正定矩阵的行列式也是正的。但是反之,并不成立。矩阵 [ ? 1 0 0 ? 3 ] \begin{bmatrix} -1&0\\0&-3 \end{bmatrix} [?10?0?3?]的行列式也是正的,但不是正定矩阵。
若将行列式作为正定的判据,则要求 n 阶矩阵左上角的所有 k x k(1<= k <= n)子行列式(subdeterminant)数值均为正,矩阵才能确定为正定矩阵。
本讲的内容将之前教授的主元、行列式和特征值的概念结合在了一起,对于正定矩阵这些都是正的,当完全掌握了它们的性质后会推广到非对称矩阵,甚至非方阵。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!