基于AT89C51单片机的节日彩灯门设计
2023-12-13 04:10:11
1.设计任务
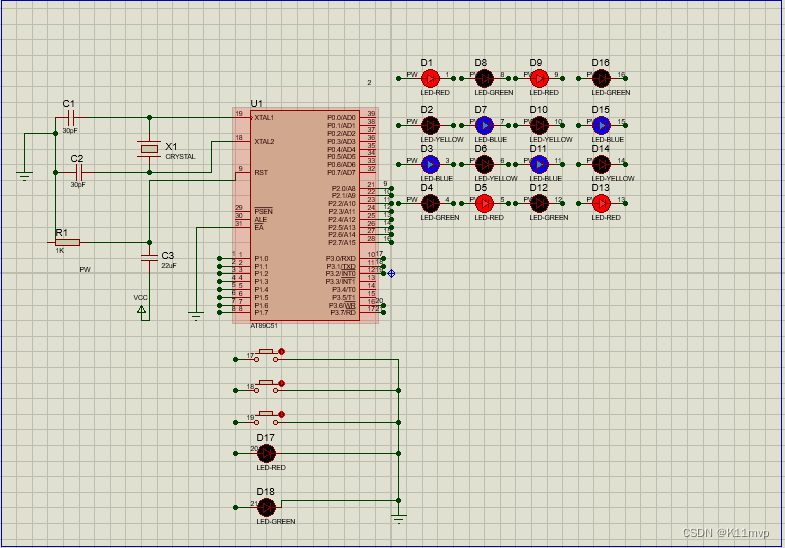
? ? ? 本设计采用单片机为主控芯片,结合外围电路组成彩灯门的控制系统器,用来控制16个彩色的LED发光,实现彩色亮点的循环移动;通过软件编程实现各种各样的彩色亮点平面循环移动,该彩色控制器可以通过输入按钮、自动模式按钮和手动模式按钮来控制实现LED彩色十种灯光间的效果切换;还可以通过按钮暂停彩灯效果,使16个彩灯灯处于全亮的状态,再次按下相同按钮后继续之前的灯光闪烁效果。其中十种灯光效果分别是:顺时针流水灯、逆时针流水灯、交替闪烁、顺时针对角灯、逆时针对角灯、顺时针逐个点亮、顺时针逐个熄灭、逆时针逐个点亮、逆时针逐个熄灭、二进制加法。
2.?设计要求
2.1系统方案论证
根据设计任务,分析设计系统的组成,给出实现设计任务的几种方案,分析比较几种设计方案的优略,本着尽量以软件代替硬件,同时力求电路简单,工作可靠的原则,确定总体设计方案。
2.2系统硬件电路设计
根据系统设计方案进行软、硬件的分配,软、硬件设计分别进行。硬件设计包括单片机最小系统和扩展接口及配置,硬件结构在设计时要选择合适的元器件,硬件电路要简洁、工作可靠,需用Proteus绘制整个系统的电路仿真原理图。
2.3软件设计
根据该系统要求的功能进行软件设计,简述软件的功能,并根据每个模块的功能绘制软件流程图,根据流程图编写程序并汇编调试通过;列出软件清单,软件清单要求加以注释。
2.4?软硬件系统仿真
将编译后的程序软件加载到Proteus软件仿真的单片机ROM中,运行系统,实现软件程序对单片机系统的硬件电路的控制,并调试仿真结果,直至与设计任务相符。
/*******************?????********************/
#include <reg51.h>
#define false 0
#define true 1
#define uchar unsigned char
#define uint unsigned int
sbit pause_key = P3^0;//????
sbit auto_key = P3^1;//????????
sbit change_key = P3^2; //????????
int ledCode[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//led??(????)
int ledCode2[8]={0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00};// led??(?????)
int disCode[10]={0x03,0x9f,0x25,0x0d,0x99,0x49,0x41,0x1f,0x01,0x09};//?????0-9
void displayLed(void);//??Led????
void keyScan(void);//????????
void Delay10ms(unsigned int n);//??10ms
bit isPause = false;//????
bit isAuto = true;//??????
bit isChange = false;//??????????
uchar time;//???0.5s
uchar types;//?????????
uint counts;//??????
void T0_INT(void) interrupt 1
{
TL0=(65536-50000)/256;
TH0=(65536-50000)%256;
time++;
if(time >= 10)//????:0.5s
{
time=0;
if(isChange == true)//????????????
{
counts = 0;
types++;//?????????
if(types > 9)types = 0;
P0 = disCode[types];
isChange = false;
}
displayLed();
counts++;
}
}
void main(void)
{
TMOD=0x61;//0110 0001 //???
TL0=(65536-50000)/256;//50ms
TH0=(65536-50000)%256;
TR0=1; //??T0
ET0=1; //T0????
EA=1; //?????
time = 0; //???????(0.5s)
counts = 0; //??????
types = 0; //???????
pauseLed = 0; //??????
P0=disCode[types];
while(1)
{
keyScan(); //???????
}
}
void keyScan(void)
{
if(pause_key == 0) //???????
{
Delay10ms(1);
if(pause_key == 0)
{
isPause = ~isPause;
pauseLed = isPause;
if(isPause == true)
{
ET0 = 0; //??T0??
P0 = 0xfd;
P1 = 0x00; //????????
P2 = 0x00;
}else{
ET0 =1; //T0????
P0 = disCode[types];
displayLed();
}
while(pause_key == 0); //????????
}
}
if(auto_key == 0) //???????????
{
Delay10ms(1);
if(auto_key == 0)
{
isAuto = ~isAuto;
autoLed = isAuto;
}
while(auto_key == 0); //????????
}
if(change_key == 0&& isAuto ==false) //????,????????
{
Delay10ms(1);
if(change_key == 0)
{
isChange = true;
}
while(change_key == 0); //????????
}
}
void displayLed(void)
{
switch(types)
{
case 0: //?????led?
{
if(counts >= 16)counts =0;
if(counts >= 15)
{
if(isAuto == true)isChange = true;
}
if(counts <8)
{
P1 = 0xff;
P2 = ledCode[7-counts];
}
else
{
P1 = ledCode[15-counts];
P2 = 0xff;
}
break;
}
case 1: //?????led?
{
if(counts >= 16)counts = 0;
if(counts >= 15)
{
if(isAuto == true)isChange = true;
}
if(counts <8)
{
P1 = ledCode[counts];
P2 = 0xff;
}
else
{
P1 = 0xff;
P2 = ledCode[counts-8];
}
case 2: //????
{
if(counts >=16)counts = 0;
if(counts >=15)
{
if(isAuto == true)isChange = true;
}
if(counts %2 == 0) //??
{
P1 = 0xaa;
P2 = 0xaa;
}
else
{
P1 = 0x55;
P2 = 0x55;
}
break;
}
case 3: //?????
{
if(counts >=8)counts = 0;
if(counts >=7)
{
if(isAuto == true)isChange = true;
}
P1 = ledCode[7- counts];
P2 = ledCode[7- counts];
break;
}
case 4: //?????
{
if(counts >=8)counts = 0;
if(counts >=7)
{
if(isAuto == true)isChange = true;
}
P1 = ledCode[counts];
P2 = ledCode[counts];
break;
}
case 5: //???????
{
if(counts >=17)counts = 0;
if(counts <8)
{
P1 = ~ledCode2[7- counts];
P2 = 0xff;
}
else if(counts <16)
{
P1 = 0x00;
P2 = ~ledCode2[15-counts];
}
else //??
{
P1 = 0x00;
P2 = 0x00;
if(isAuto == true)isChange = true;
}
break;
}
case 6: //????????
{
if(counts >=17)counts = 0;
if(counts <8)
{
P1 = ledCode2[7- counts];
P2 = 0x00;
}
else if(counts <16)
{
P1 = 0xff;
P2 = ledCode2[15-counts];
}
else //??
{
P1 = 0xff;
P2 = 0xff;
if(isAuto == true)isChange = true;
}
break;
}
case 7: //???????
{
if(counts >=17)counts = 0;
if(counts <8)
{
P1 = 0xff;
P2 = ledCode2[counts];
}
else if(counts <16)
{
P1 = ledCode2[counts -7];
P2 = 0x00;
}
else //??
{
P1 = 0x00;
P2 = 0x00;
if(isAuto == true)isChange = true;
}
break;
}
case 8: //???????
{
if(counts >=17)counts = 0;
if(counts <8)
{
P1 = 0x00;
P2 = ~ledCode2[counts];
}
else if(counts <16)
{
P1 = ~ledCode2[counts -7];
P2 = 0xff;
}
else //??
{
P1 = 0xff;
P2 = 0xff;
if(isAuto == true)isChange = true;
}
break;
}
case 9: //?????
{
if(counts >=255)counts = 0;
if(counts ==254 && isAuto == true)isChange = true;
P1 = ~counts;
P2 = ~counts;
break;
}
default:
types = 0;
P0 = disCode[types];
}
}
}
void Delay10ms(unsigned int n)
{
unsigned int a,b;
for(;n>0;n--)
{
for(b=38;b>0;b--)
{
for(a=130;a>0;a--);
}
}
}完整代码点开链接私信? 免费? 获取。
【iBot机器人工作室的个人空间-哔哩哔哩】 https://b23.tv/ryUWVKa
文章来源:https://blog.csdn.net/K11mvp/article/details/134711832
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!