无人叉车驻车定位RFID传感器CNS-RFID-01|1S的CAN总线通信连接方法
无人叉车驻车定位RFID传感器CNS-RFID-01|1S支持CAN总线通信方式,广泛应用于智能仓库,AGV |RGV小车,无人叉车,搬运机器人定位,驻车等领域,本篇幅主要介绍器CNS-RFID-01|1S RFID传感器的CAN总线通信连接方法。

1、CAN 总线通信连接
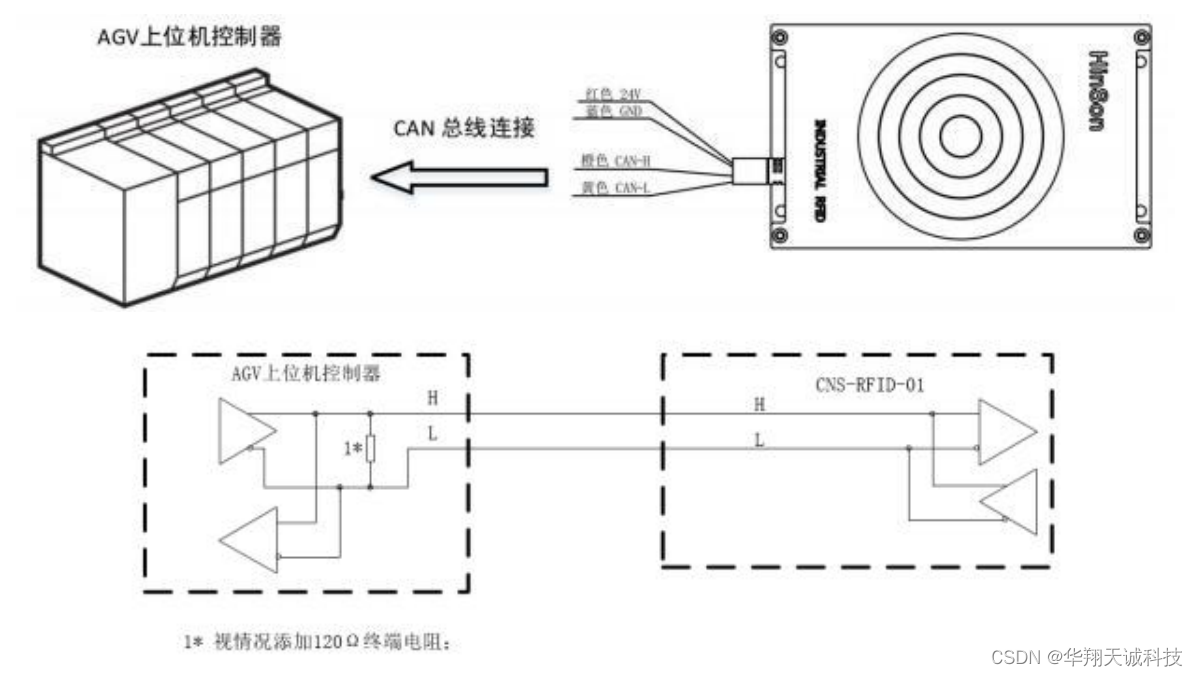
2 、通讯设定
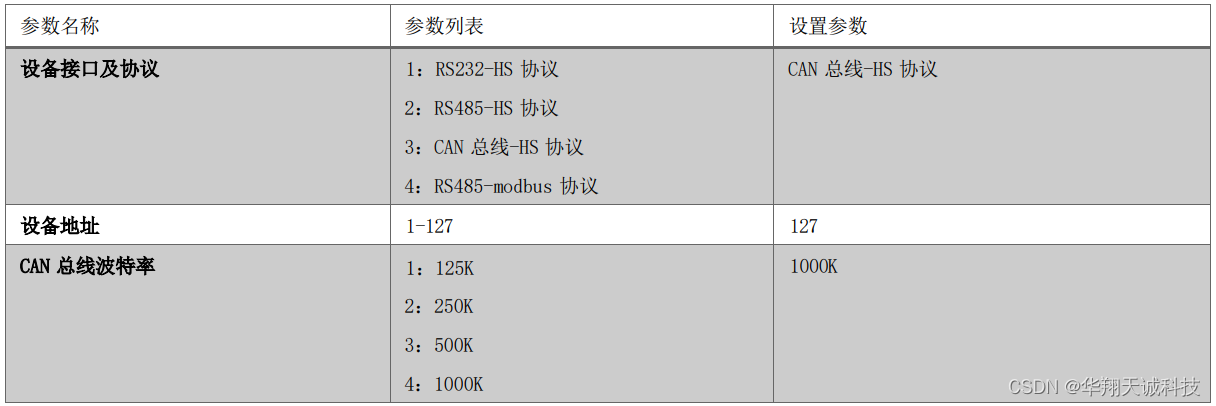
使用 CAN 总线使用的是 HS 协议,需要先对 CNS-RFID-01/1S 进行设定后再使用。由于无法直接使用 CAN 总线对设备进行参数设定,需 要通过电脑端 Hinson 配置软件进行参数配置。
具体配置连接见“配置参数”如下:

3、?通讯规格

3.1 、主从站通讯时序
询问模式
主站对 1 台从站传送询问,从站执行处理,回复响应。

广播播模式
从站按照设置的时间间隔自动广播


4 、信息
上位机可以对卡进行读写卡操作, 通信协议包括两部分, 读取卡数据和写入卡数据, 下面就对两种操作协议进行详细说明;
4.1 数据协议
CAN 总线模式下一次返回数据分两帧数据返回。
读卡操作数据流程

RFID-01 传感器返回数据模式包括询问模式,读卡触发模式,定时广播模式。
询问模式:RFID 传感器接收到上位机询问数据后, 返回数据
读卡触发模式:RFID 传感器在读取到卡信息后主动发送数据
定时广播模式:RFID 传感器按照设置的时间间隔自动发送数据
读卡数据帧
询问数据可以读取卡数据和向卡内写入数据,通过向从站 RFID 传感器发送两种数据来实现读卡和写卡功能

● 数据(1-7 Byte)
读卡模式:发送数据长度 1-7Byte 任意数据;
写卡数据帧
询问数据可以读取卡数据和向卡内写入数据,通过向从站 RFID 传感器发送两种数据来实现读卡和写卡功能

● 数据(1-8 Byte)
写卡模式:发送数据长度 8Byte;
返回数据帧
RFID 传感器会自动记录保存最近一次读卡的数据, 以便上位机能够随时能够确定地标。
第一帧数据
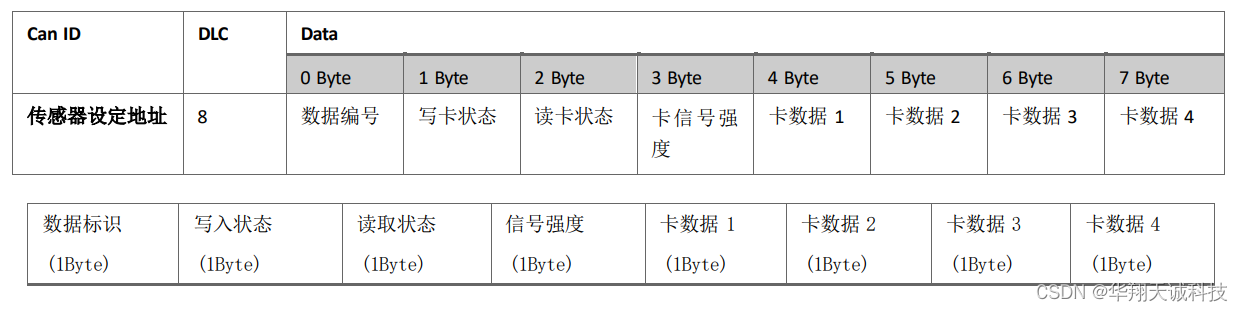
数据标识(1Byte)
? ? ? ? 0x01:第一帧数据标识;
写入状态(1Byte)
? ? ? ?0x00:写入成功;
? ? ? ?0x01:写入错误或者卡内部被锁定;
? ? ? ?0x02:未检测到可以写入的卡;
读取状态(1Byte)
? ? ? ? 0x00:RFID 传感器非读卡状态;
? ? ? ? 0x01:RFID 传感器正在读卡状态;
卡信号强度(1Byte)
? ? ? ? 0x00-0x07:读取到卡信号强度,
? ? ? ? 0x00 信号强度最弱,
? ? ? ? 0x07 信号强度为最强;
卡数据 1(1Byte);
? ? ? ?卡内第 1 字节数据;
卡数据 2(1Byte);
? ? ? ?卡内第 2 字节数据;
卡数据 3(1Byte);
? ? ? 卡内第 3 字节数据;
卡数据 4(1Byte);
? ? ? ? 卡内第 4 字节数据;
第二帧数据


数据标识(1Byte):
? ? ? ?0x02:第二帧数据标识;
写入状态(1Byte):
? ? ? ? 0x00:写入成功;
? ? ? ?0x01:写入错误或者卡内部被锁定;
? ? ? ?0x02:未检测到可以写入的卡;
读取状态(1Byte):
? ? ? ?0x00:RFID 传感器非读卡状态;
? ? ? ? 0x01:RFID 传感器正在读卡状态;
卡信号强度(1Byte):
? ? ? ? ?0x00-0x07:读取到卡信号强度,
? ? ? ? ?0x00 信号强度最弱,
? ? ? ? ? 0x07 信号强度为最强;
卡数据 5(1Byte):
? ? ? ? ?卡内第 5 字节数据
卡数据 6(1Byte):
? ? ? ? 卡内第 6 字节数据
卡数据 7(1Byte):
? ? ? ? ?卡内第 7 字节数据
卡数据 8(1Byte):
? ? ? ? ? 卡内第 8 字节数据
更多关于无人叉车驻车定位RFID传感器CNS-RFID-01|1S的CAN总线通信连接方法,华翔天诚科技欢迎您的咨询与交流!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!