ROS URDF-link标签
URDF是一种用于描述机器人的XML格式。在URDF文件中,link标签用于定义机器人的各个部件。描述机器人某个部件的外观和物理属性,比如: 机器人底座、轮子等,每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性。
name: 定义链接的唯一名称。
inertial: 描述链接的惯性特性,包括质量、质心位置和转动惯量。
visual: 定义链接的视觉表现,包括颜色、材质和几何形状。
collision: 定义链接的碰撞形状,用于物理模拟和碰撞检测。
1.属性
name ---> 为连杆命名
- 子标签
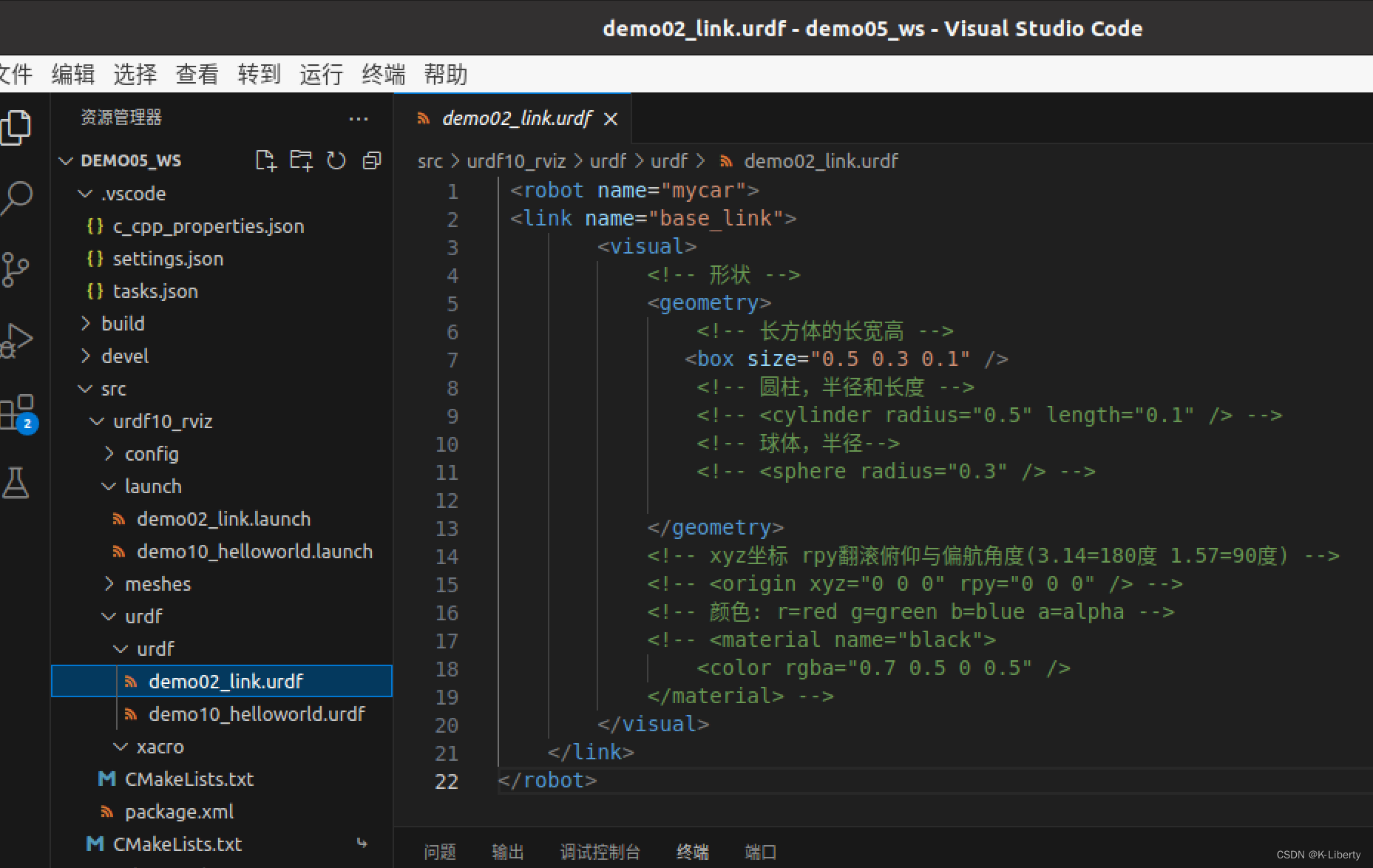
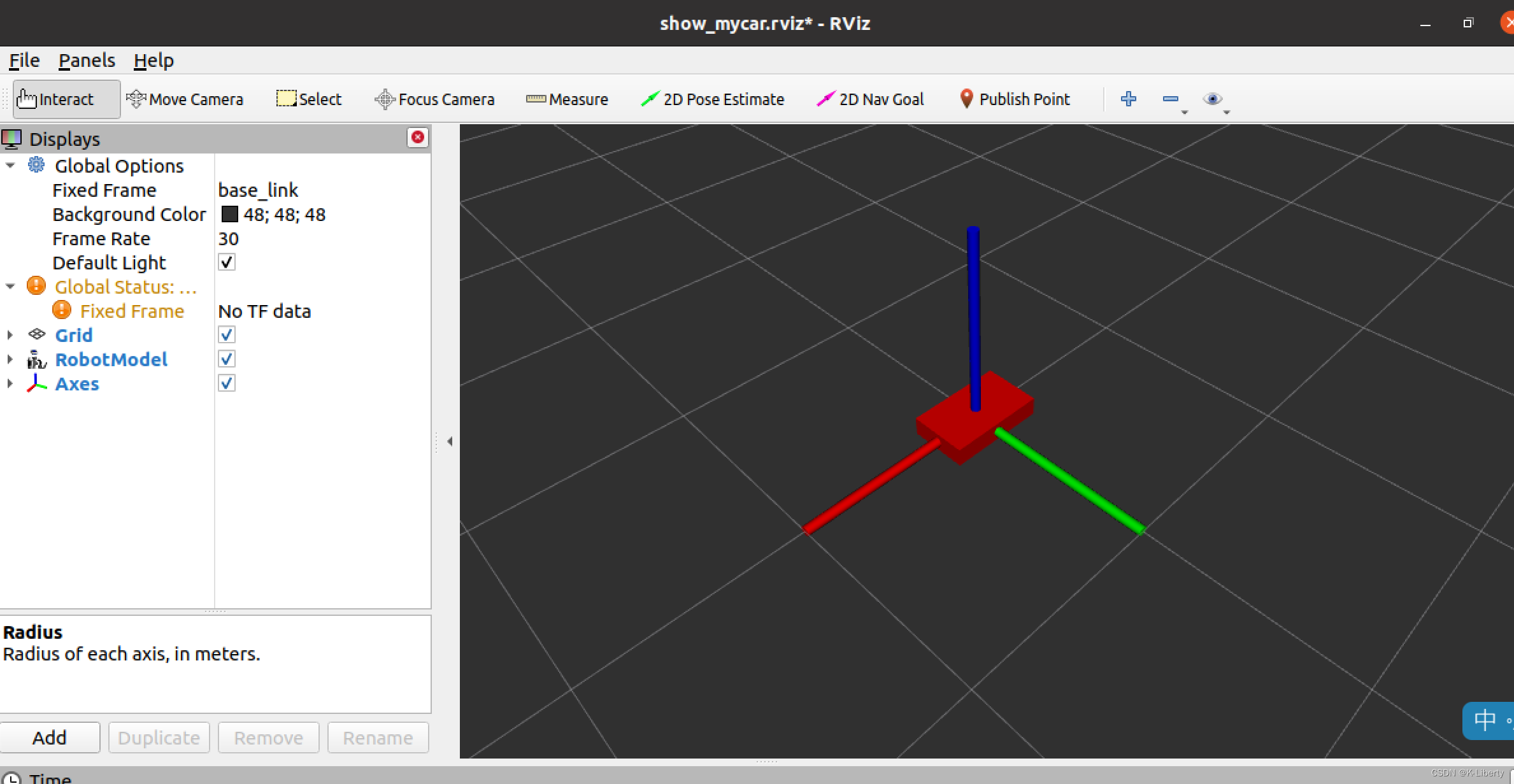
visual ---> 描述外观可视化
geometry 设置连杆的形状
标签1: box(盒状)??????????属性:size=长(x) 宽(y) 高(z)
标签2: cylinder(圆柱)??????属性:radius=半径 length=高度
标签3: sphere(球体)???????属性:radius=半径
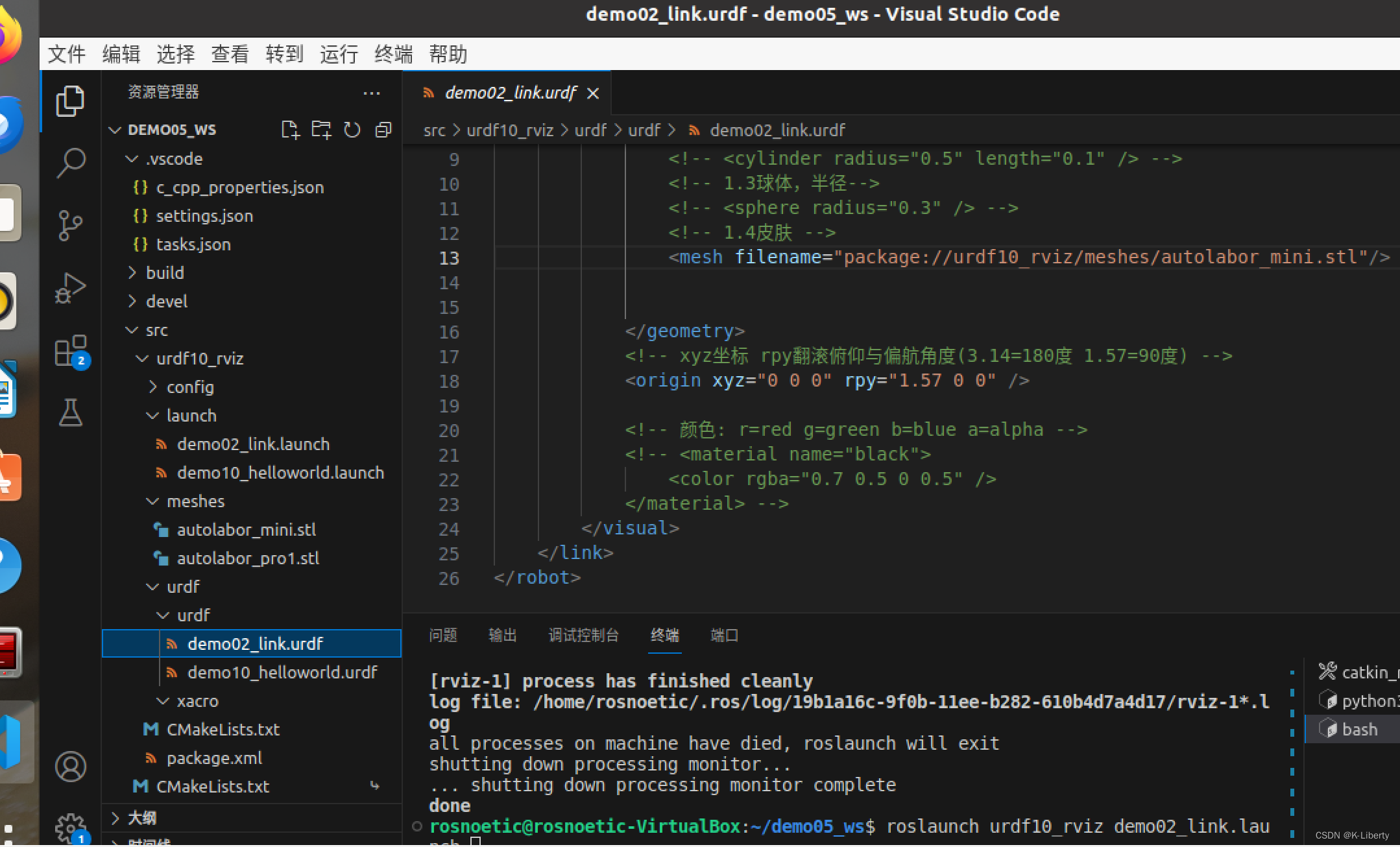
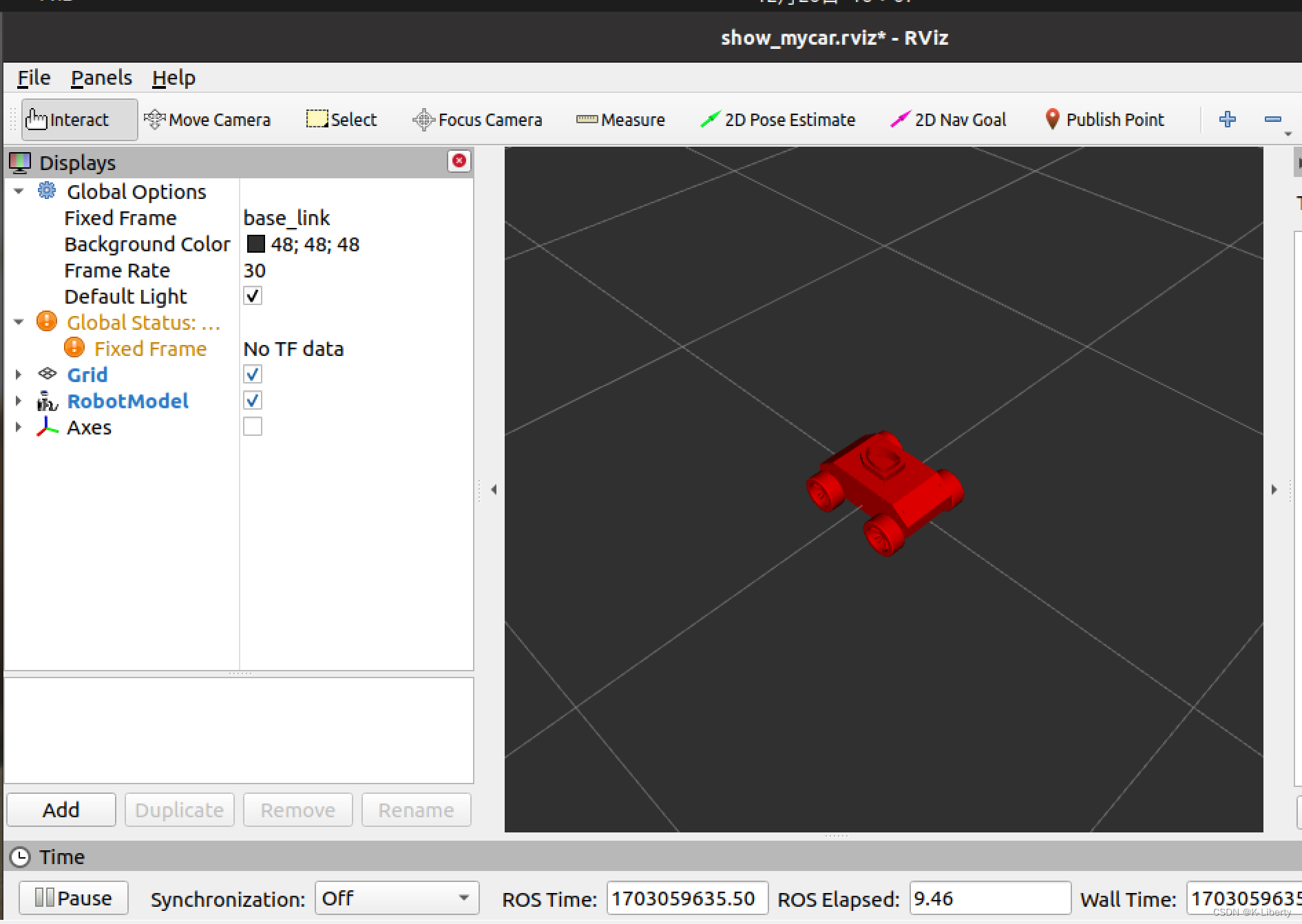
标签4: mesh(为连杆添加皮肤)?
属性: filename=资源路径(格式:package://<packagename>/<path>/文件)
origin 设置偏移量与倾斜弧度
属性1: xyz=x偏移 y便宜 z偏移
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
metrial 设置材料属性(颜色)
属性: name
标签: color
属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
collision ---> 连杆的碰撞属性
Inertial ---> 连杆的惯性矩阵

从图中可以看到,检测碰撞的link区域大于外观可视的区域,这就意味着只要有其他物体与collision 区域相交,就认为link发生碰撞。
实例演示








本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!