Matlab 点云对称性检测
2023-12-14 18:18:26
一、简介
这是一个很有趣的功能,它的思路其实与ICP算法的思路有些相似:
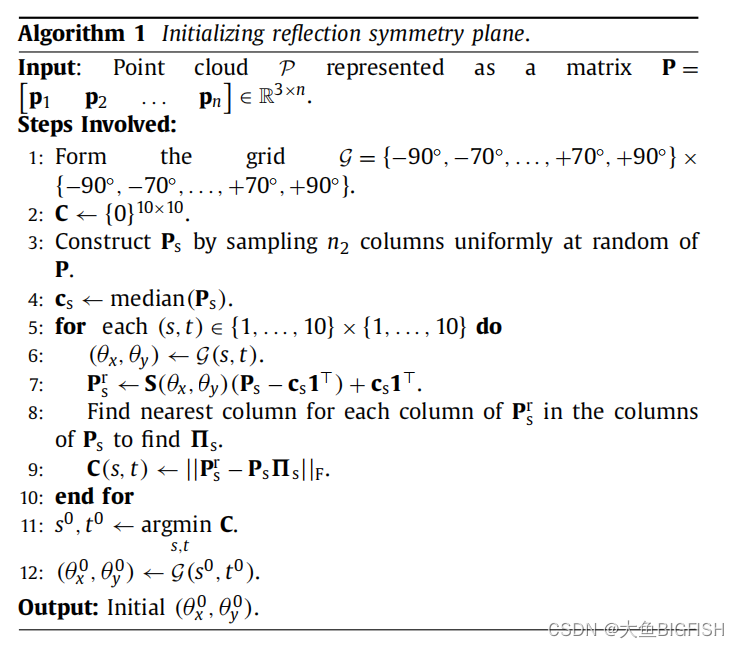
- 首先,它会初始化两个旋转角度,即绕x轴旋转与绕y轴旋转,初始的过程是将点对称(镜像)过去,计算与匹配点之间的距离误差,误差最小者为最优初始值。
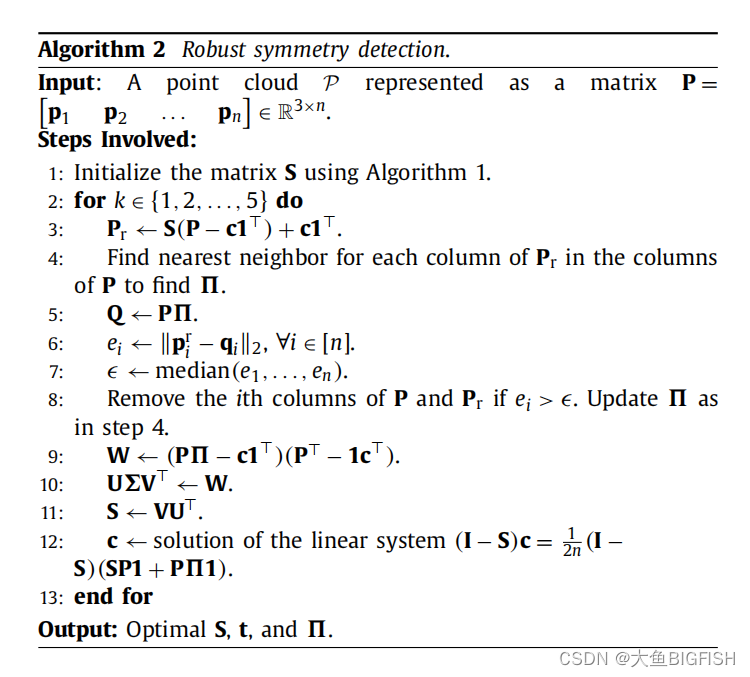
- 基于初始的旋转角度,迭代修正初始的旋转角度直至最后的结果满足我们设置的阈值或是达到指定的迭代次数,则算法停止。当然这里只是简述一下,具体过程还是挺复杂的,如下图所示:
二、实现代码
%
文章来源:https://blog.csdn.net/dayuhaitang1/article/details/134866391
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!