基于FPGA的图像Robert变换实现,包括tb测试文件和MATLAB辅助验证
目录
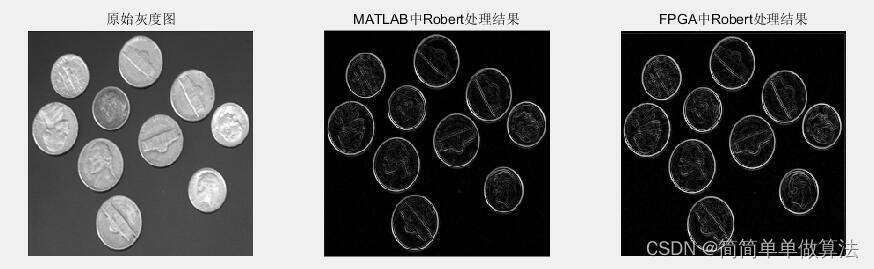
1.算法运行效果图预览
fpga的结果导入到matlab显示:
2.算法运行软件版本
vivado2019.2
matlab2022a
3.部分核心程序
.......................................................................
module test_image;
reg i_clk;
reg i_rst;
reg [7:0] Buffer [0:100000];
reg [7:0] II;
wire [7:0] o_robert;
integer fids,idx=0,dat;
//D:\FPGA_Proj\FPGAtest\codepz\project_1\project_1.srcs\sources_1
initial
begin
fids = $fopen("D:\\FPGA_Proj\\FPGAtest\\codepz\\test0.bmp","rb");
dat = $fread(Buffer,fids);
$fclose(fids);
end
initial
begin
i_clk=1;
i_rst=1;
#1000;
i_rst=0;
end
always #5 i_clk=~i_clk;
always@(posedge i_clk)
begin
II<=Buffer[idx];
idx<=idx+1;
end
tops tops_u(
.i_clk (i_clk),
.i_rst (i_rst),
.i_I (II),
.o_robert (o_robert)
);
integer fout1;
initial begin
fout1 = $fopen("SAVEDATA.txt","w");
end
always @ (posedge i_clk)
begin
if(idx<=66623)
$fwrite(fout1,"%d\n",o_robert);
else
$fwrite(fout1,"%d\n",0);
end
endmodule
0X_025m4.算法理论概述
? ? ? ? 随着数字图像处理技术的不断发展,边缘检测作为图像处理的基本操作,其在机器视觉、自动驾驶、医学影像分析等领域的应用日益广泛。Robert交叉梯度算子是一种常用的边缘检测方法,具有简单、快速的特点。本文将详细介绍基于FPGA的Robert交叉梯度算子实现原理,包括算法原理、FPGA设计流程、实验结果与分析等。
? ? ? Robert交叉梯度算子是一种基于一阶微分的边缘检测方法,它通过计算图像中每个像素点在两个正交方向上的灰度差来检测边缘。具体地,对于图像中的每个像素点(P(x,y)),其Robert交叉梯度定义为:
(G_x = P(x,y) - P(x+1,y+1))
(G_y = P(x+1,y) - P(x,y+1))
? ? ? ? ?其中,(G_x)和(G_y)分别表示像素点在水平和垂直方向上的灰度差。然后,可以根据梯度幅度和方向来判断像素点是否属于边缘:
(G = \sqrt{G_x^2 + G_y^2})
? ? ? ?其中,(G)表示梯度幅度。通常可以设定一个阈值,当梯度幅度大于该阈值时,认为像素点属于边缘。
? ? ? ?基于FPGA的Robert交叉梯度算子实现主要包括以下几个步骤:图像数据输入、灰度化处理、Robert交叉梯度计算、边缘检测和结果输出。下面将详细介绍每个步骤的实现原理。
1 图像数据输入
? ? ? ?首先,需要将待处理的图像数据输入到FPGA中。可以通过外部存储器(如SDRAM)或摄像头等设备将图像数据传输到FPGA的片上存储器中。在FPGA内部,可以使用FIFO(First In First Out)等缓冲结构来暂存图像数据,以确保数据的连续性和稳定性。
2 Robert交叉梯度计算
? ? ? ?在灰度化处理后,接下来进行Robert交叉梯度的计算。根据Robert算子的定义,需要计算每个像素点在水平和垂直方向上的灰度差。在FPGA中,可以使用相邻像素的并行访问和计算来实现这一步骤。具体地,可以设计一个计算单元,该单元同时读取当前像素和其相邻像素的灰度值,并计算出水平和垂直方向上的灰度差。然后,根据灰度差计算出梯度幅度和方向。
3 边缘检测
? ? ? ?在计算出梯度幅度和方向后,需要进行边缘检测。可以根据设定的阈值来判断每个像素点是否属于边缘。如果梯度幅度大于阈值,则将该像素点标记为边缘点;否则,标记为非边缘点。在FPGA实现中,可以使用比较器等逻辑电路来实现阈值判断和边缘标记。
4 结果输出
? ? ? ? ?最后,将边缘检测的结果输出到外部设备或存储器中。可以将边缘标记的图像数据通过FIFO等缓冲结构输出到外部接口,以供后续处理或显示使用。同时,也可以将处理过程中的一些统计信息(如边缘点的数量、处理时间等)输出到外部接口,以供性能分析和优化使用。
5.算法完整程序工程
OOOOO
OOO
O
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!