如何让机器人具备实时、多模态的触觉感知能力?
人类能够直观地感知和理解复杂的触觉信息,是因为分布在指尖皮肤的皮肤感受器同时接收到不同的触觉刺激,并将触觉信号立即传输到大脑。尽管许多研究小组试图模仿人类皮肤的结构和功能,但在一个系统内实现类似人类的触觉感知过程仍然是一个挑战。
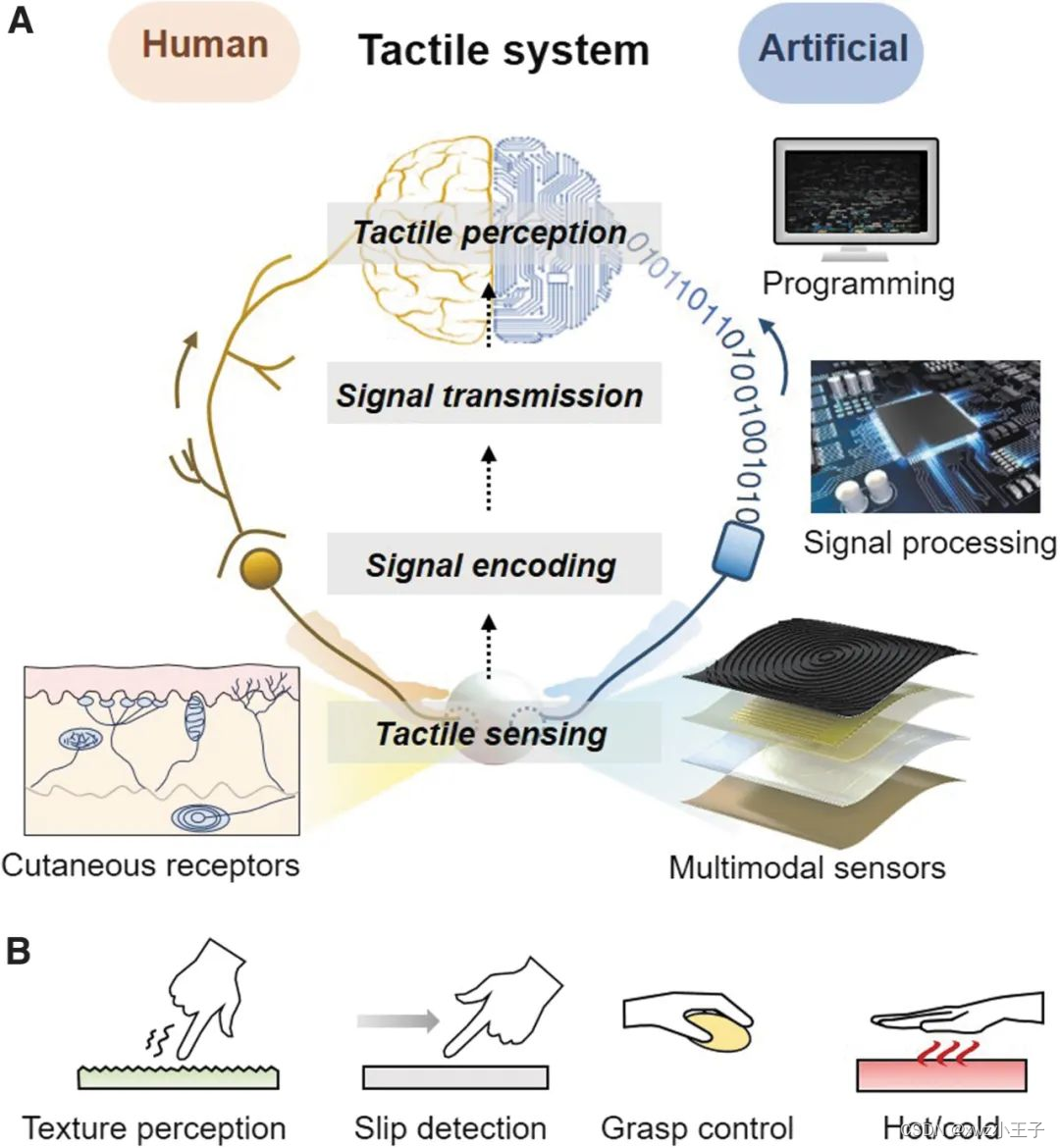
触觉系统示意图
在这项研究当中,韩国机械材料研究所开发了一种实时多模式触觉系统,通过使用多个传感器、信号处理和传输电路模块以及信号分析,模拟皮肤感受器的功能以及触觉刺激从感受器到大脑的传导。
该系统能够同时获取四种类型的解耦触觉信息,区分各种触觉刺激、纹理特征和连续的复杂运动。这种类皮肤的三维集成设计为多模式触觉传感系统提供了更多的可能性。
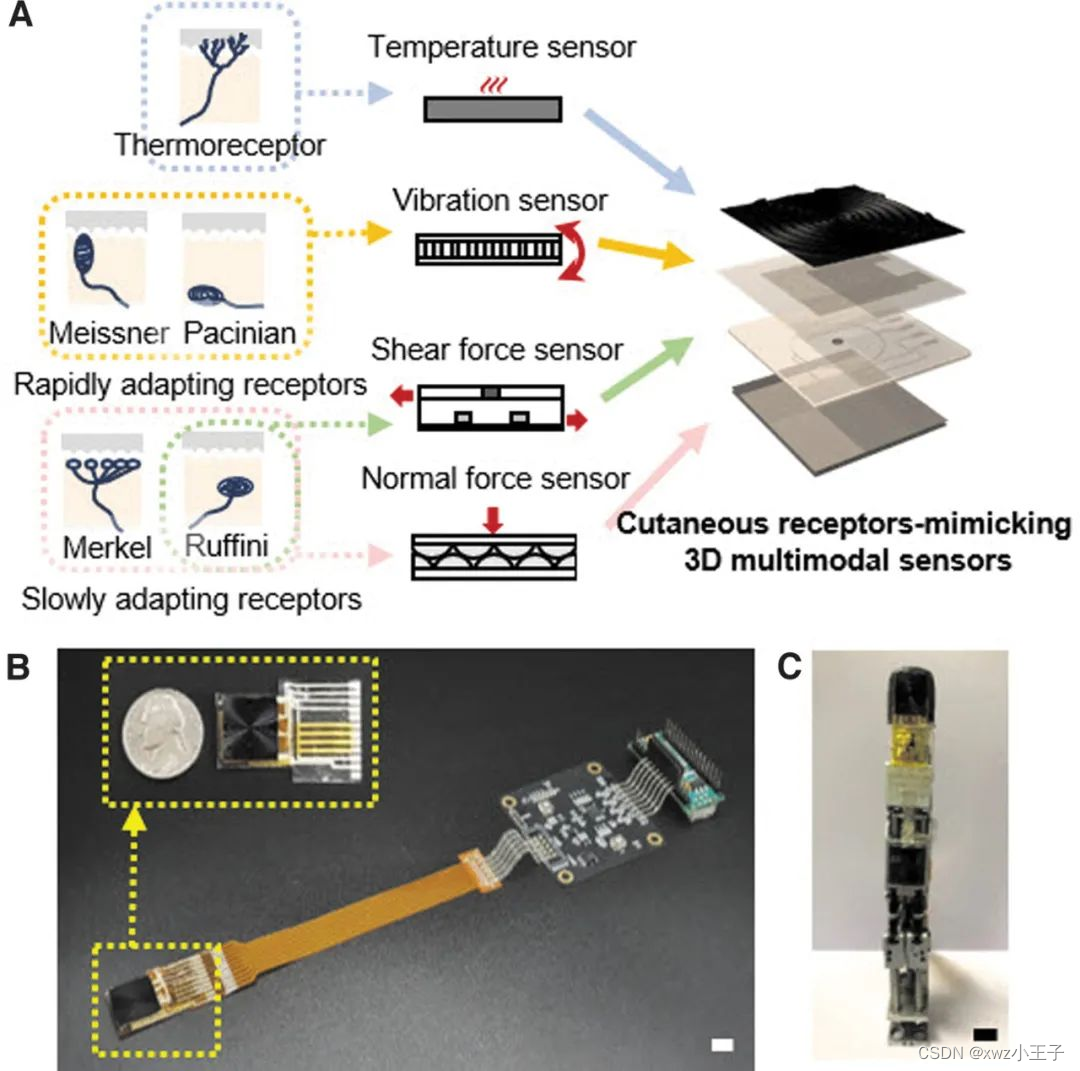
模拟皮肤受体的传感器
人类皮肤被认为是最有效和最强大的触觉传感器。因此,研究人员进行了许多研究来开发柔性电子皮肤,它可以模拟人类皮肤的特性并提供各种触觉信息,例如力反馈和纹理分类,将使机器人能够执行精确而微妙的动作。仿皮肤触觉传感技术的进步可以在机器人与VR虚拟现实领域提供多样化的交互方式。
然而,为了完全模仿人类皮肤的传感能力,至关重要的是开发一种传感系统,该系统可以检测不同的物理量,同时实时考虑触觉信息,其方式类似于位于人类皮肤下的皮肤感受器。皮肤感受器包括响应温度变化的温度感受器和实时检测法向力、剪切力和振动的机械感受器,检测到的多种触觉信号然后传输到大脑,使人类能够感知和理解复杂的触觉信息。
电子皮肤的早期研究主要集中在提高这些触觉传感设备的灵活性和灵敏度,这些设备可以检测单个物理量,例如法向力。尽管近年来一些研究小组开发了多功能电子皮肤,但这些设备与皮肤受体不同,可以检测湿度、紫外线和磁场等化学和物理定性信息。虽然一些电子皮肤表现出法向力、剪切力、弯曲和扭转等多种触觉力的传感特性,但它们需要对每种力进行主观分类,因为只能通过信号波形的形状来区分力。
然而,这些问题可以通过组装不同的传感设备并分别读取每个设备的信号来解决,类似于分布在人体皮肤中的多个皮肤感受器。绝大多数传感器都检测到四种触觉刺激中的两种:法向力、剪切力、动态力和温度。研究提出了由两个可以检测静态和动态刺激的设备组成的集成传感器。通过将机械感受器分为慢适应和快适应受体来模仿机械感受器,但它们仍然无法检测到各种复杂的触觉刺激。此外,在一个系统内同时、实时地读取来自多个传感器的信号是非常困难的,因为每个传感器信号通常是使用商业测量仪器单独获得的。
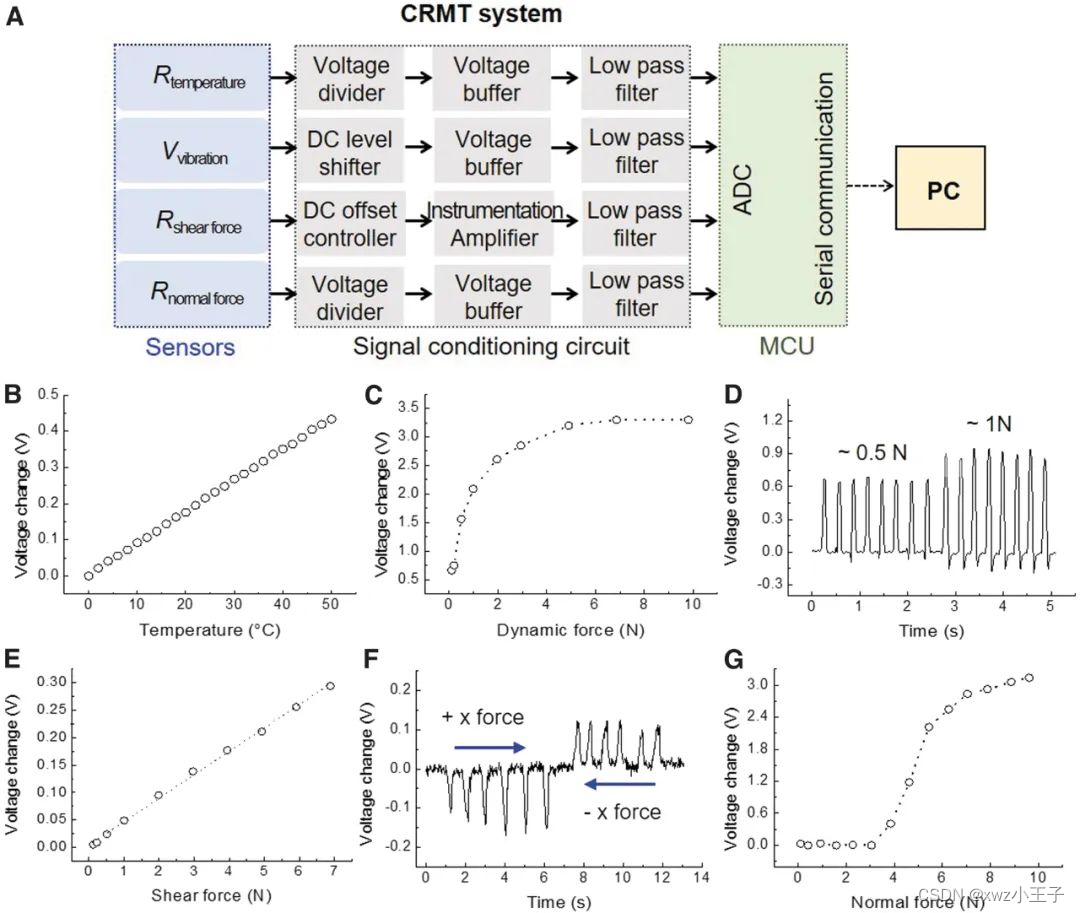
CRMT 系统示意图和 CRMT 传感器的传感特性
在该项研究当中,研发人员提出了一种模拟皮肤受体触觉(CRMT)系统,该系统可以通过一个统一而紧凑的系统同时实时感知四种不同类型的触觉刺激,例如法向力、剪切力、振动和温度。CRMT系统由多功能传感单元、信号处理与传输模块、触觉分析模块三部分组成。为了在单个传感节点检测多种触觉刺激,多功能传感单元是通过垂直堆叠和集成四种类型的传感器而开发的,所有这些传感器都是灵活且轻薄的。
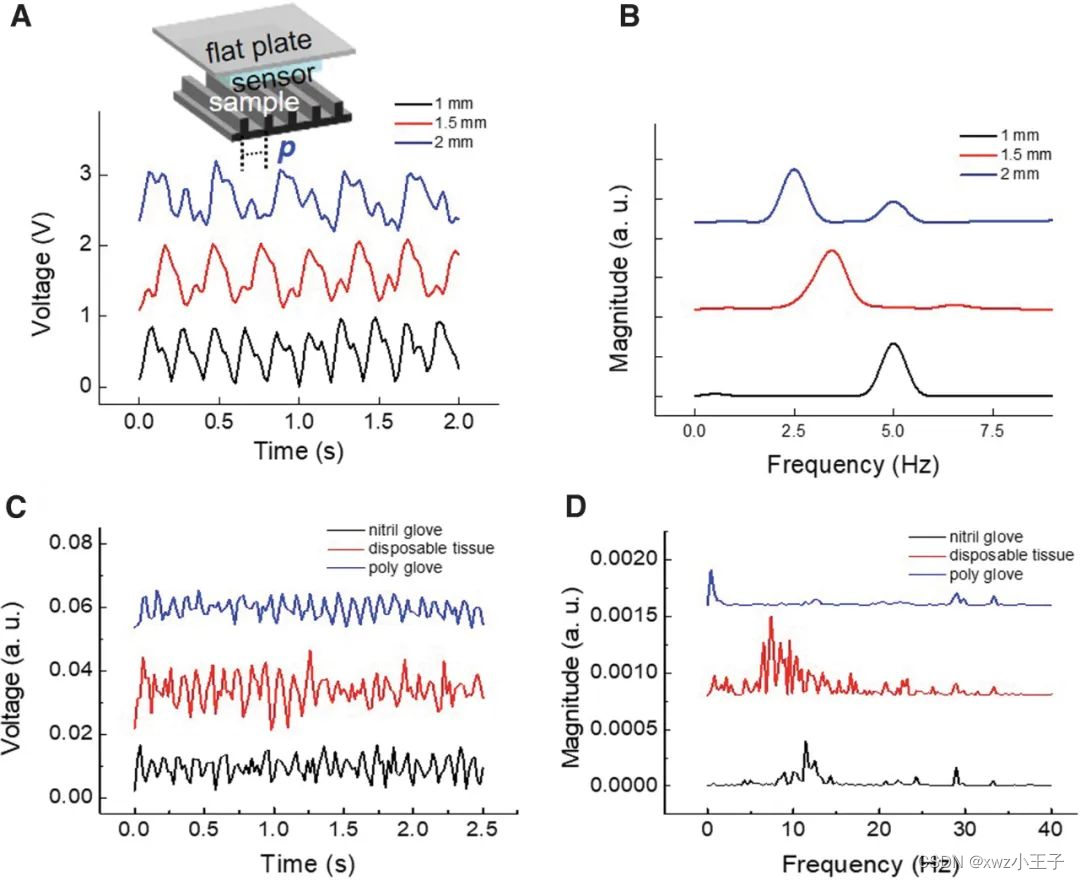
图案间距和纹理辨别
在信号处理模块中,研发人员为每个传感器设计了具有不同输出特性的定制电子集成电路,以获得实时信号,多种触觉刺激之间不会产生任何干扰,而无需使用昂贵且笨重的测量仪器。
此外研发人员使用编程语言开发了触觉分析模块,以实现实时监控、信号分析和数据处理。为了提高系统在现实世界中的可用性,研究人员使用直接墨水书写(一种微挤压3D打印技术)在3D集成传感器和信号处理模块之间制造了可拉伸的三维(3D)互连。
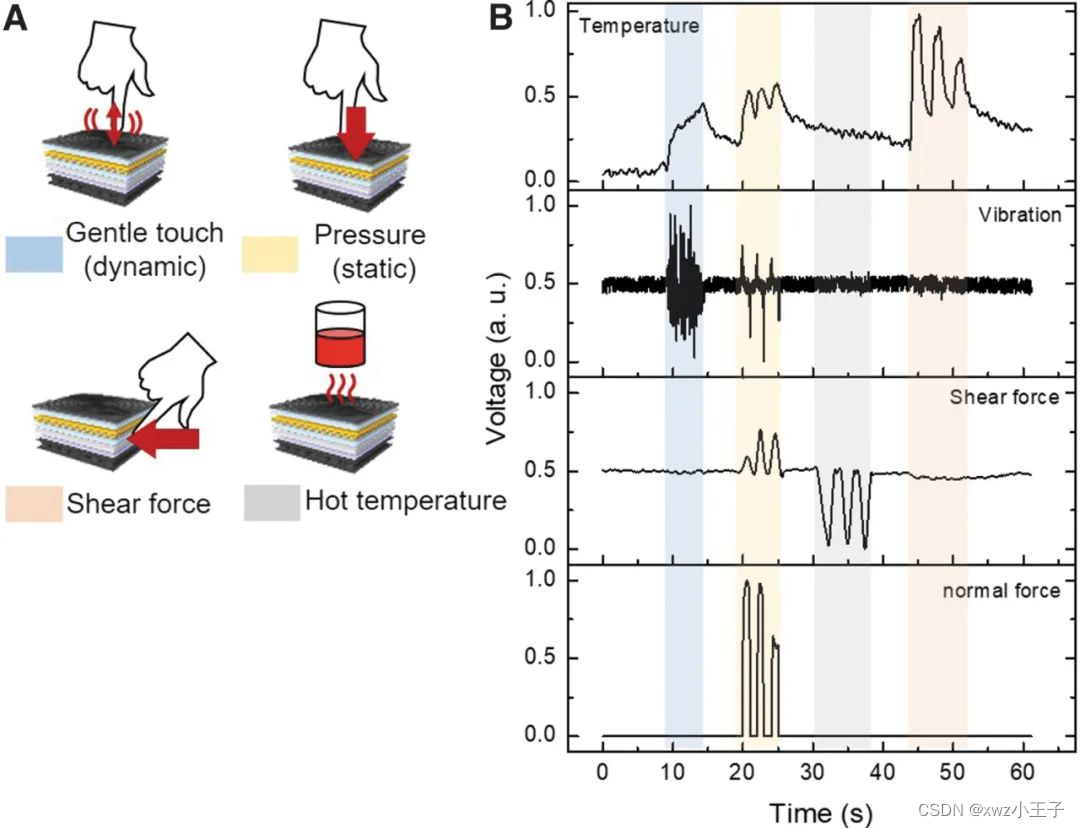
实时同步监测各种触觉刺激
复杂触觉运动的感知
最终研究人员所提出的 CRMT 系统能够实时测量和区分各种触觉刺激,例如动态触摸、深压力、剪切力和温度变化。此外,系统还获取纹理信息,例如图案节距和粗糙度,并识别八个连续的复杂运动。因此,所展示的CRMT系统将为类皮肤、可感知、触觉传感系统提供灵感,未来将取得广泛应用,例如人形机器人手臂、人机界面、健康监测系统和生物医学登设备。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!