现代雷达车载应用——第2章 汽车雷达系统原理 2.1节
????????经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.1 基本雷达功能
????????雷达系统通过天线或天线阵列向空间辐射电磁能量。辐射的电磁能量“照亮”周围的目标。“被照亮”的目标拦截一些辐射能量,并将一部分反射回雷达系统。雷达系统利用一个或多个接收信道来探测反射能量以确定目标的距离、速度和相对角度。
????????根据雷达发射机发射的波形类型不同,雷达系统可分为脉冲雷达和连续波雷达。脉冲雷达由一串重复的短持续时间脉冲组成。根据发射脉冲和接收脉冲之间的时间延迟来测量目标的距离。与脉冲雷达不同,连续波雷达通常在一段时间内连续发射电磁波。通过将接收到的信号与发射信号进行比较,获得目标的特性。在汽车应用中,连续波雷达系统因其在多个方面的优势而占据主导地位。与脉冲雷达相比,连续波雷达具有峰值发射功率低、结构简单、集成度高的特点,应用领域广泛,尤其是汽车领域。本章试图对汽车应用雷达技术的基本原理进行全面、一致的阐述。虽然脉冲雷达和连续波雷达之间的许多概念是相同的,但在本书中,更强调连续波雷达。
????????汽车雷达的功能可分为探测、跟踪和成像。在本章中,重点是检测,以及执行任务的信号处理的基本技术。跟踪和成像将在接下来的章节中讨论。对于目标探测来说,最根本的问题是确定接收机接收到的回波是来自物体的反射还是仅仅是噪声。对于连续波雷达,通常通过将接收到的回波信号幅度与阈值进行比较来做出检测决策,该阈值可以预先定义或实时计算。对于鲁棒雷达系统,需要从实时雷达数据中自适应计算阈值。
????????为了获得目标的距离,连续波雷达需要某些类型的调制。利用调制将距离信息编码成回波信号,再通过信号处理提取回波信号。例如,线性调频连续波(FMCW)雷达将目标的距离编码为基带信号的频率。在相位调制连续波雷达中,距离信息按相位码序列进行编码,通过计算回波与原始码序列的相关性提取相位码序列。尽管有各种类型的调制,雷达的距离分辨率(ΔR)与发射信号的带宽(BW)成反比:
![]() ??(2.1)
??(2.1)
????????在汽车雷达应用中,较大的BW通常有利于实现更好的距离分辨率。
????????雷达还能够利用多普勒效应获得目标的相对速度。这是汽车雷达与其他汽车传感器(如摄像头和LiDAR)相比的主要优势之一,LiDAR是“光探测和测距”的缩写。多普勒效应是电磁波相对于相对于雷达运动的目标在频率或相位上的变化。它是以奥地利物理学家克里斯蒂安·多普勒的名字命名的,他在1842年描述了这一现象。多普勒效应的原因是,当目标向雷达移动时,每一个连续的电磁波波峰都是从比前一个电磁波波峰更靠近雷达的位置反射的。因此,每个电磁波到达雷达所需的时间比前一个电磁波略短。因此,连续电磁波波峰到达雷达的时间间隔减少,导致接收到的电磁波的相位减少。相反,如果目标远离雷达,则每一波的反射位置都比前一波离雷达更远,因此连续电磁波之间的到达时间增加,相位增加。雷达通过计算来自目标的一系列发射之间的相位演化,可以获得目标的相对速度。
????????对于汽车应用来说,仅仅获得目标的相对距离和速度通常是不够的。为了做出正确的决策,比如紧急刹车,车辆还需要知道目标在3D空间中的位置。如图2.1所示,汽车雷达在球坐标系下测量目标(P)的位置。+x轴是轴视方向,通常垂直于雷达的天线板。x-y平面上的角φ是方位角,角θ是仰角。在雷达系统中,获取目标的方位角和仰角有几种方法。最著名的方法之一是使用机械旋转器[1]。在这种方法中,一个具有非常窄的辐射波束的雷达安装在一个旋转器上,对环境进行机械扫描。目标的相对仰角和方位角由旋转器的位置给出。机械扫描雷达在军事上有着广泛的应用;然而,由于其体积庞大,它不适合汽车应用,这需要雷达紧凑和低成本。其他角度测量方法还包括相控阵、数字波束形成以及多输入多输出技术,这些技术不需要任何机械旋转结构,集成度高[1]。本章将简要介绍相控阵和数字波束形成技术。多输入和多输出技术将在下一章详细讨论。
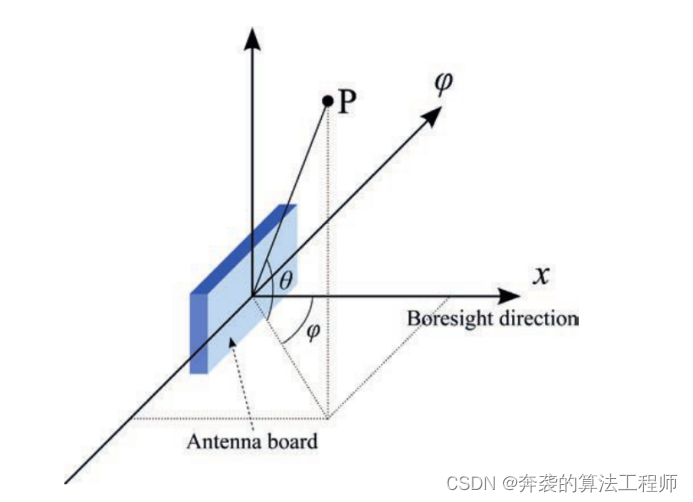
图2.1?雷达测量用球坐标系
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!