计算机体系结构----指令集与简单CPU处理器设计(二)
本文仅供学习使用,严禁转载。本文参考资料来自中国科学院大学计算机体系结构课程PPT,以及计算机体系结构量化研究方法(第6版)
本文主要对计算机组成原理做一个简要的复习,方便后续深入整个计算机体系结构。
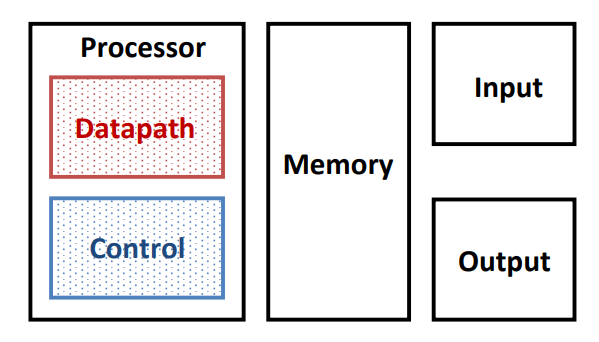
处理器及其组件
Processor (CPU): 执行指令集架构中的指令。
- 数据通路(DataPath):处理器中包含执行处理器需要的操作必要硬件部分。
简单说就是指令执行过程中,数据所经过的路径上的部件。一般包括逻辑运算部件(ALU)、寄存器堆(Register File/ RegFile/ RF)。 - 控制部件(Control Unit):处理器中告诉数据通路需要做什么的部件。
控制部件对指令进行译码,生成指令对应的控制信号,控制数据通路的动作。
控制器是指令的控制部件,对执行部件发出这些控制信号。
衡量处理器性能的一个角度
处理器内部的数据通路和控制设计将对时钟周期(clock cycle time)和每条指令所花的时钟数(clock cycles per instruction/CPI) 产生影响。
CPUTime = InstructionCount × CPI × Cycle Time (ET = IC × CPI × Cycle Time)
CPU的执行时间表示成指令数乘以每条指令所花的时间
指令数目(InstructionCount/IC)由编译器和ISA决定
时钟周期(Cycle Time)和CPI主要由CPU的设计与实现决定
处理器设计过程
设计一个处理器的五个步骤:
- 分析指令集以推导出数据通路的要求。
- 选择一组数据通路组件并建立时钟方法。
- 组装数据路径以迎合需求。
1~3是数据通路的设计步骤 - 分析每条指令的实现,以确定影响寄存器传输的控制点的设置。
- 组装控制逻辑:制定逻辑方程并设计电路
5~6是控制部件的设计步骤
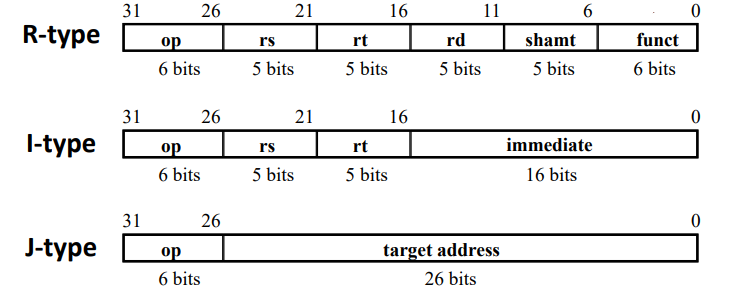
MIPS 中的指令形式
MIPS:无内部互锁流水级的微处理器(Microprocessor without Interlocked Piped Stages)
具体关于MIPS的ISA可以点击传送门:MIPS指令集架构(需要魔法访问)
MIPS的特点:
- 本课程讨论的所有MIPS指令都是32-btis 长的。
- 格式少且字段固定
- 内存操作种类确定且单一
- 内存中操作数对齐,访存次数只有一次
- MIPS指令集是一种典型的RISC精简架构指令集
三个典型的MIPS指令形式如下。
一些典型的MIPS指令
我们先了解如何实现仅包含以下指令的简化 MIPS CPU
- Arithmetic-logical instructions: add, sub, and, or, slt
- Control flow instruction(s): beq
- Memory-reference instructions: lw, sw
- A subset of MIPS core ISA
注意,上面所有的指令都要使用ALU
下面列出几个典型的指令
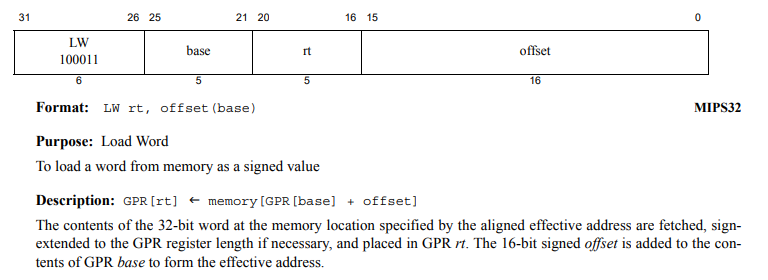
- LW:将存储器的数据加载到寄存器堆。GPR表示CPU general-purpose register,也叫Register File。
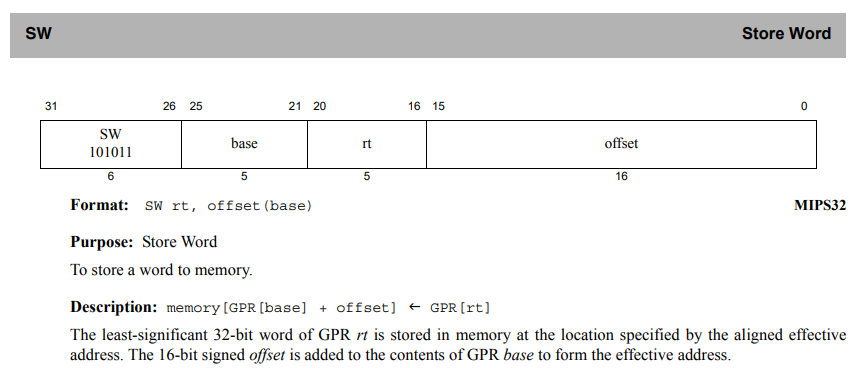
2. SW:将寄存器堆里的一个数存到存储器中。
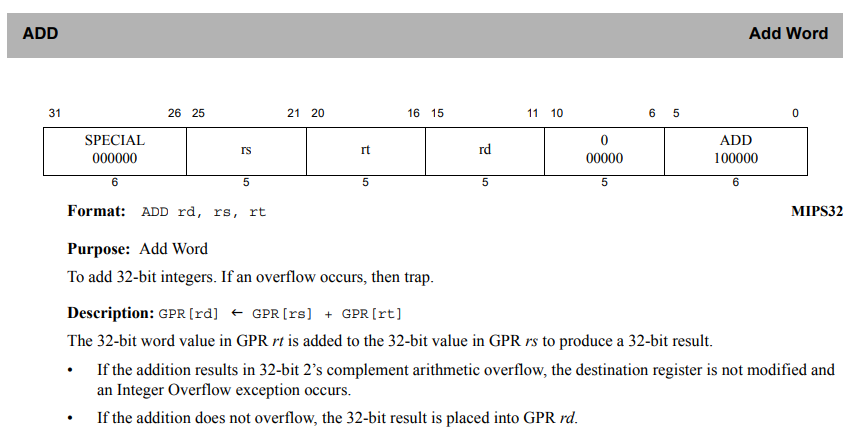
3. ADD:将两个存储在寄存器堆的数相加,结果存到寄存器堆。
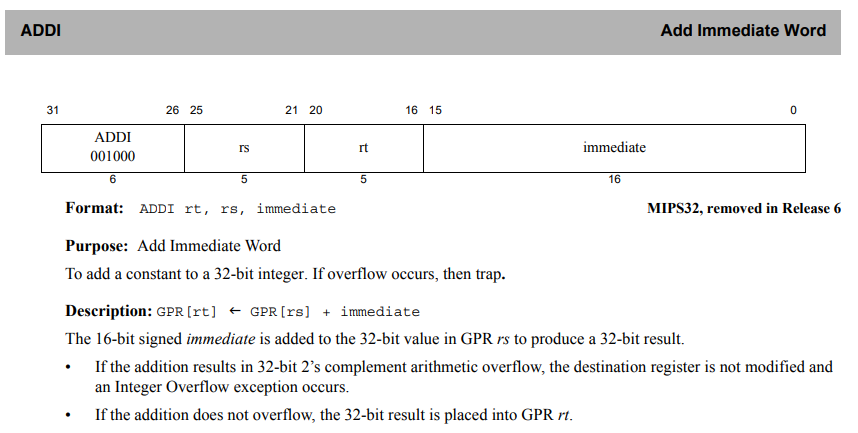
- ADDI:将寄存器堆中的一个数和立即数相加再存储到寄存器堆。
- ADDI:将寄存器堆中的一个数和无符号立即数相加再存储到寄存器堆。
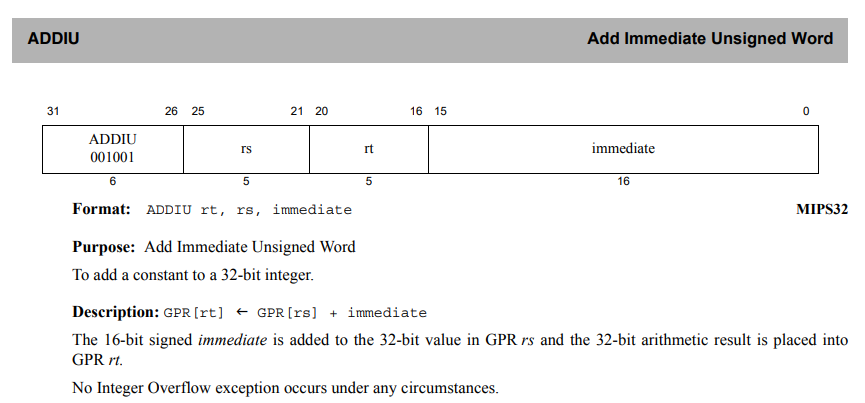
- ADDU:寄存器堆中的两个无符号数相加,结果存到寄存器堆。

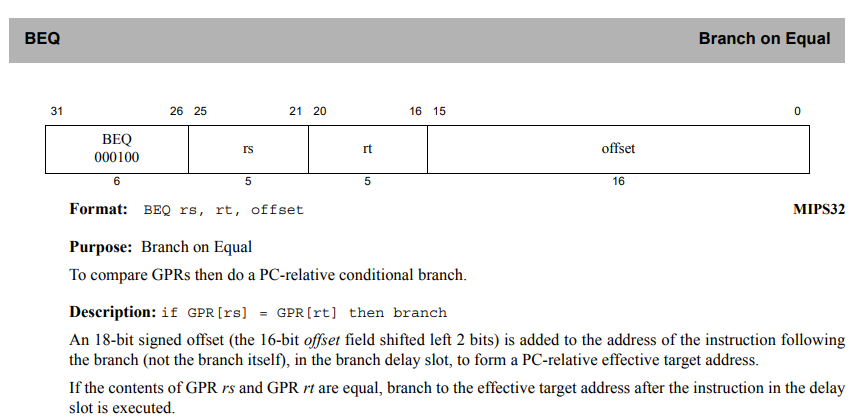
- BEQ:两个寄存器堆里面的数相等即产生分支,分支指令地址偏移由offset指定
指令执行的基本步骤
- Instruction Fetch:从指令地址获取指令,指令存储在存储器中。
- Decode:解码指令后访问寄存器堆。
- Execution:在ALU中执行指令的加法等算术和与或非等逻辑操作。
- Memory Access:访问存储器,要么从存储器取数据,要么把数据存储在存储器里。
- Write back results to registers:将数据写回寄存器堆。
- 程序计数器PC(Program counter)移动到下一个指令地址。
初步连接数据通路部件的简易CPU

上图是初步的CPU数据通路图,下面我们将其切块细嚼。
PC的数据通路
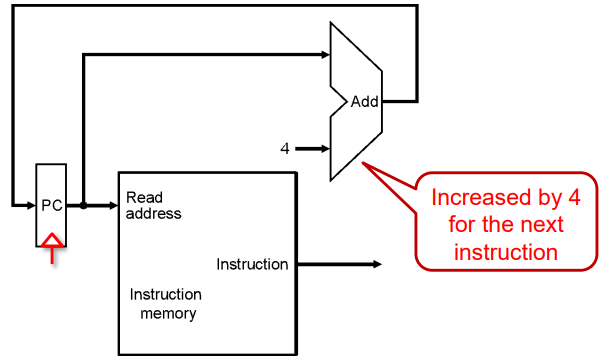
RTL级操作:
- 获取指令: inst <- mem[PC]
- 更新程序计数器:
- Sequential Code: PC <- PC + 4(+4是因为看成32位系统,地址按字节寻址)
- Branch and Jump: PC <- “something else”
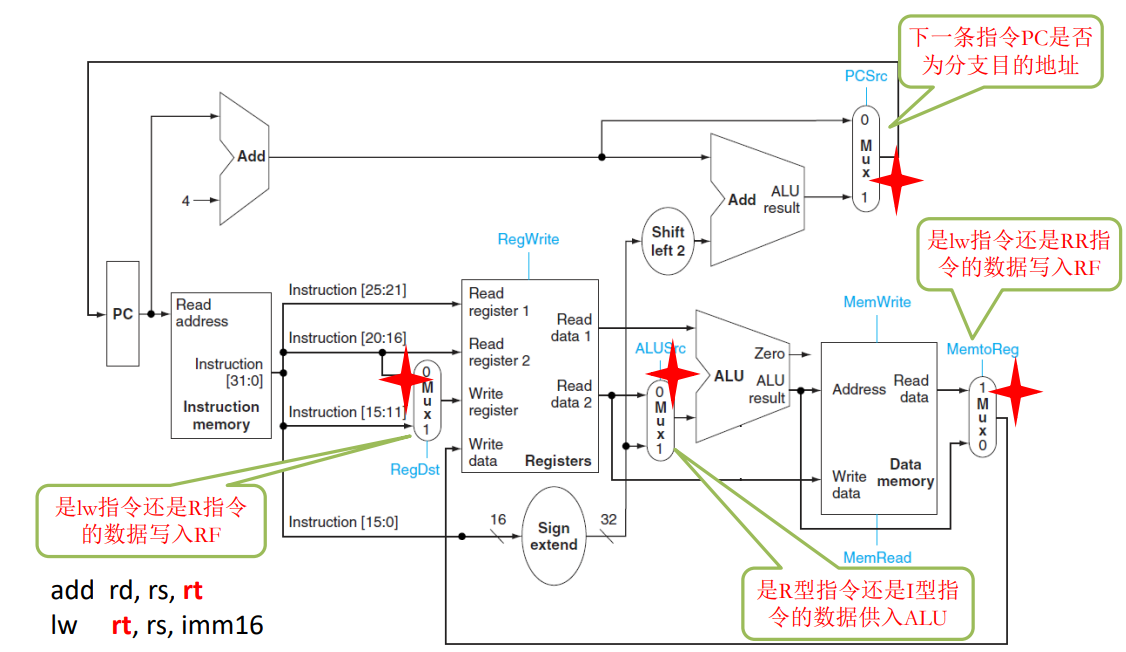
寄存器堆的数据通路
示例: add rd, rs, rt
R[rd] <- R[rs] op R[rt]
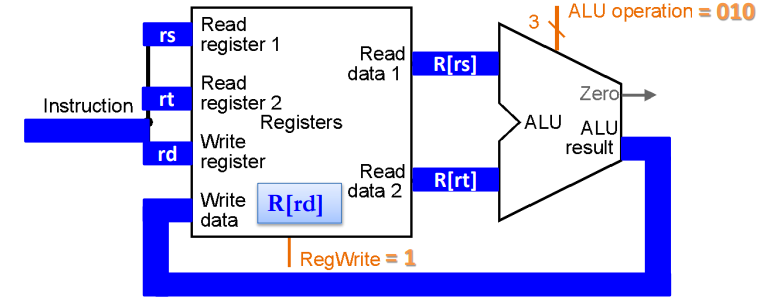
通过rs和rt这两个地址索引从寄存器堆中获取要相加的数,将相加的结果送回rd所指向的寄存器堆中的地址。
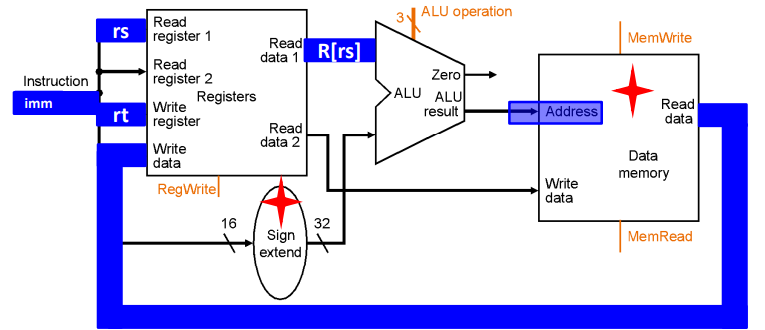
Load操作的数据通路
示例: lw rt, rs, imm16
R[rt] <- Mem[R[rs] + SignExt[imm16]]
Store操作的数据通路
示例:sw rt, rs, imm16
Mem[R[rs] + SignExt[imm16]] <- R[rt]
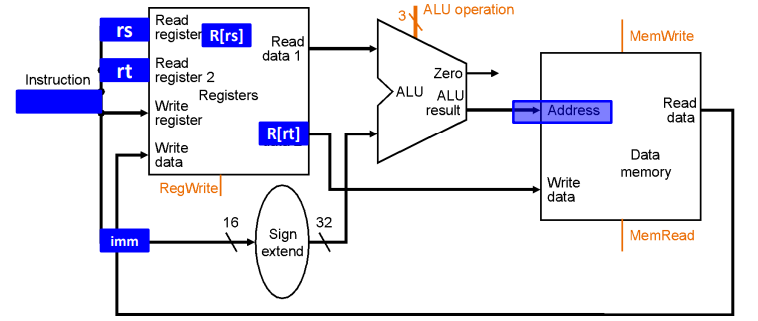
注意,Load和Store操作的立即数都是往存储器地址上加的
分支操作的数据通路
示例: beq rs, rt, imm16
Z <- (rs == rt); if Z, PC = PC+4+imm; else PC = PC+4
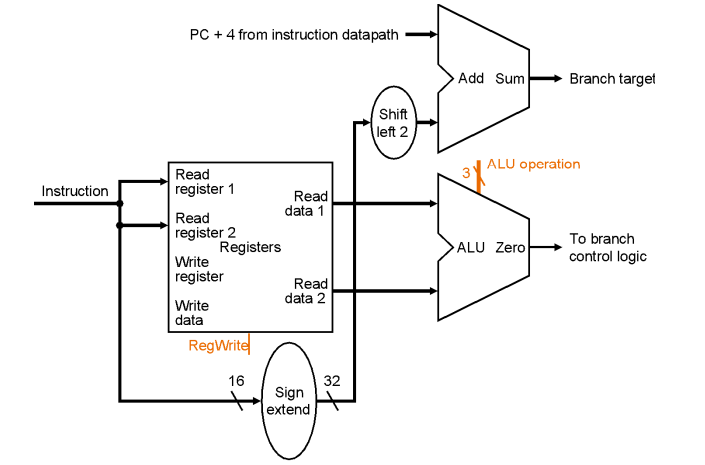
- 读寄存器里面的操作数
- 使用ALU中的减法操作比较两个操作数是否相等(减法结果为0即相等)
- 计算目标地址:符号位扩展,移位,PC+4(+imm)
组装好的单周期处理器数据通路
注意这是单周期处理器,数据通路里面不包含寄存器,所有的指令都在一个时钟周期内完成。
设计单周期数据通路的控制器
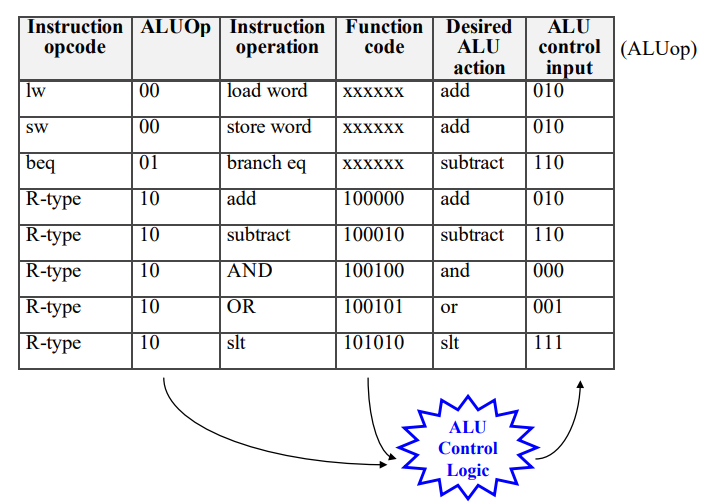
ALU控制
- 五个功能的ALU
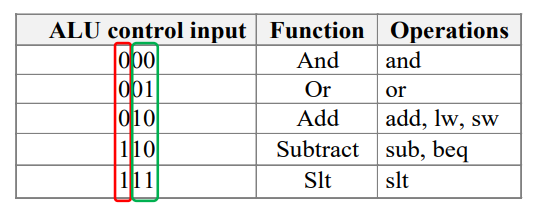
- 基于指令的操作码(位 31-26)和功能码(位 5-0)进行解码
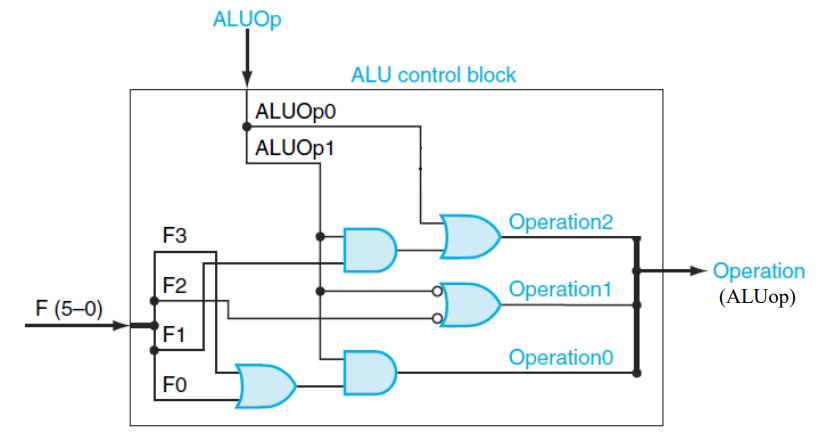
ALU控制的逻辑电路
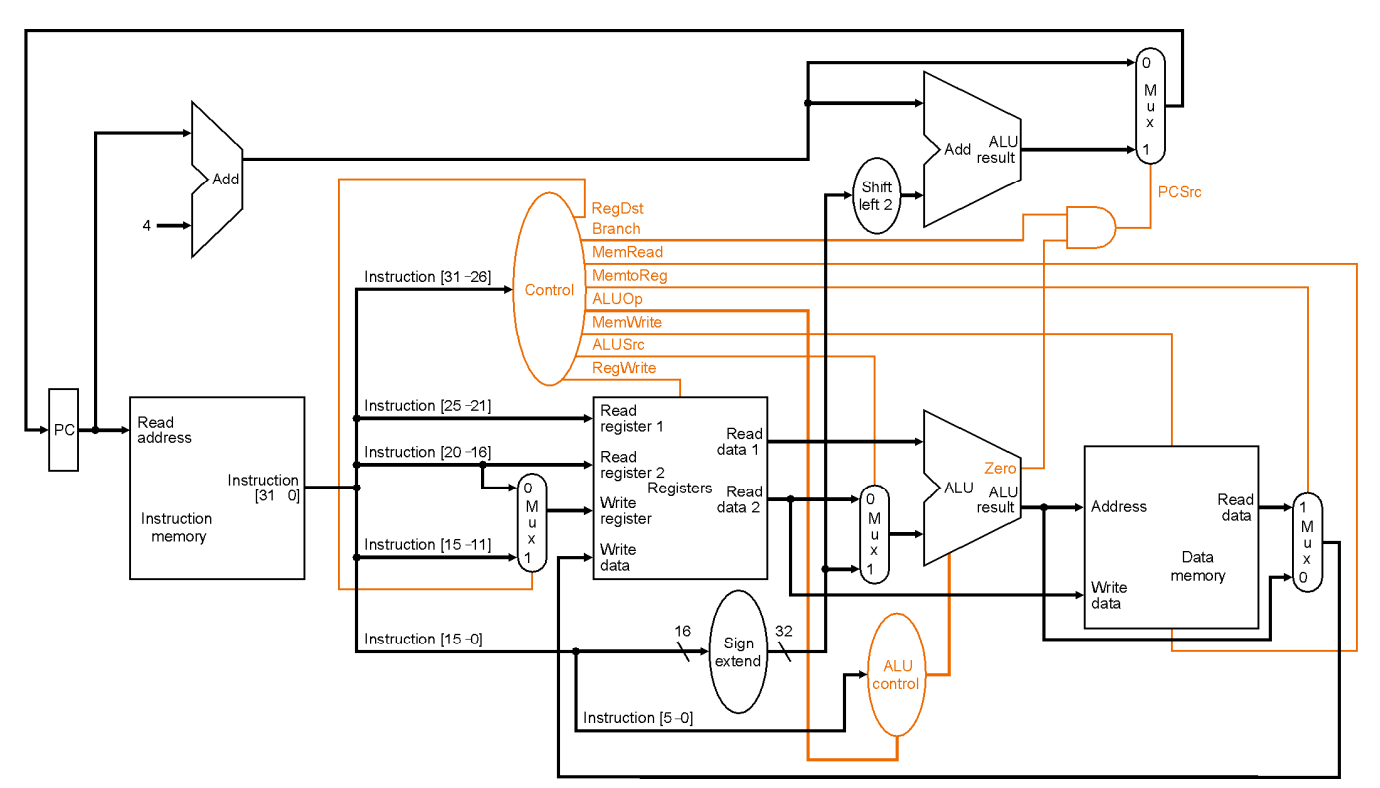
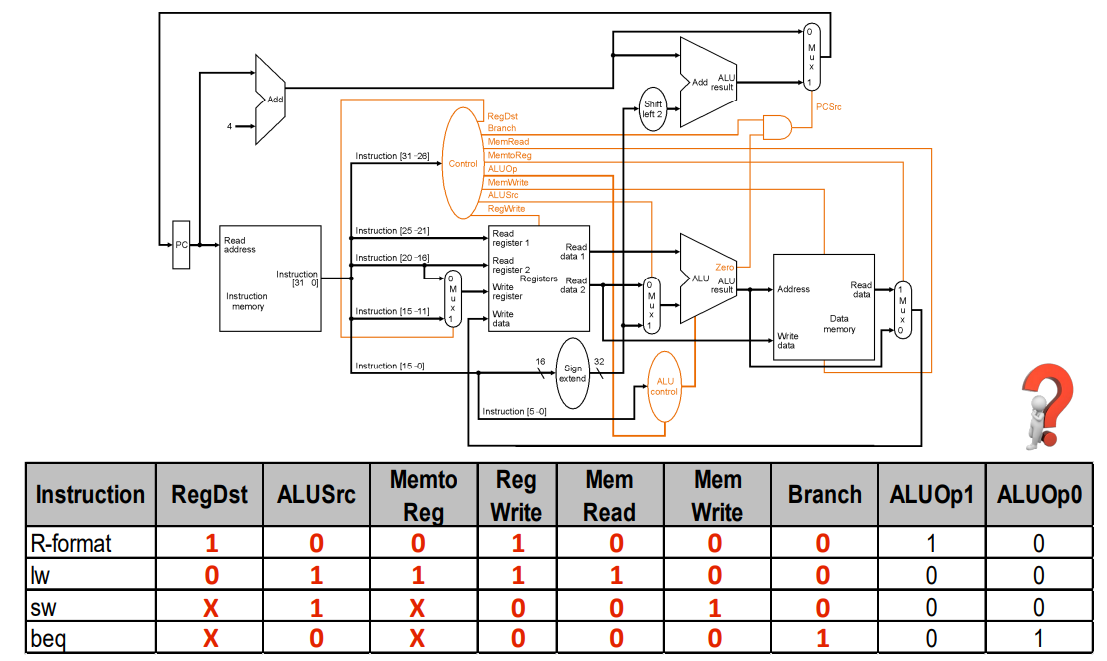
CPU所有控制部件
橙色的线表示控制部件
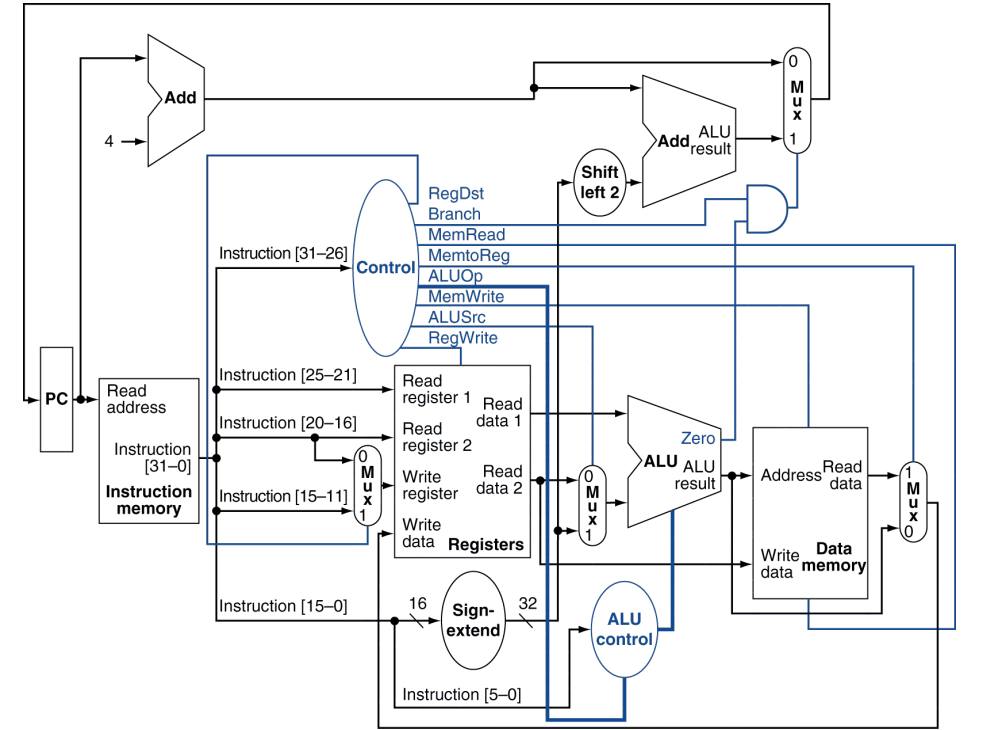
控制部件+数据通路的单周期CPU原理图
下图是支持9条指令的单周期处理器 (add, sub, and, or, slt, lw, sw, beq, j)
这张图要能画出来
总结:处理器设计步骤
ISA确定后,进行处理器设计的大致步骤
第一步:分析每条指令的功能,并用RTL(Register Transfer Language)
来表示
第二步:根据指令的功能给出所需的元件,考虑时钟方案
第三步:将数据通路互连
第四步:确定每个元件所需控制信号的取值。汇总所有指令所涉及到的
控制信号,生成一张反映指令与控制信号之间关系的表
第五步:根据表得到每个控制信号的逻辑表达式,据此设计控制器电路
- 处理器设计涉及到数据通路的设计和控制器的设计
- 数据通路中有两种元件
? 操作元件:由组合逻辑电路实现
? 存储(状态)元件:由时序逻辑电路实现
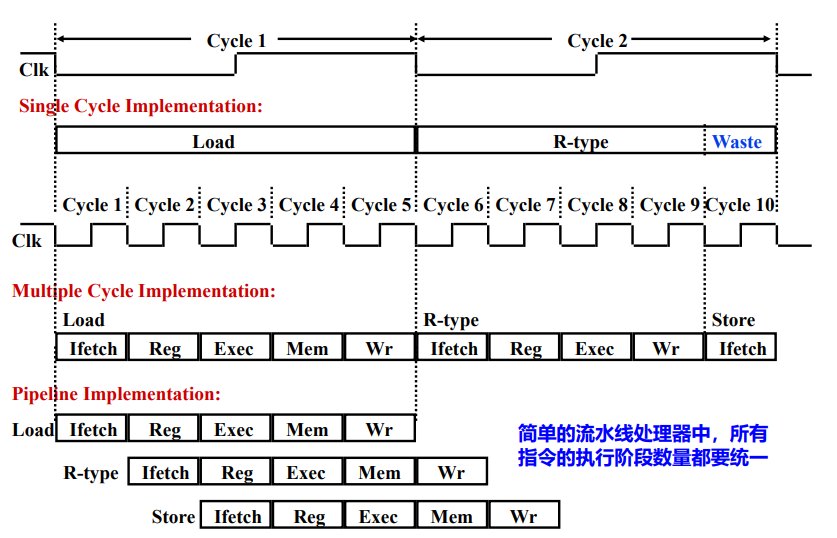
多周期CPU
相较于单周期的好处:
- 不同指令不同时间执行,没必要像多单周期一样非得按照最长指令的执行时间设置系统时钟。
- 能够重用某些功能部件,如memory、ALU等等(使用pipeline)
? 每条指令分成多个阶段,每个阶段在一个时钟内完成
? 不同指令包含的时钟个数不同
? 阶段的划分要均衡,每个阶段只能完成一个独立、简单的功能,如:
一次ALU操作
一次存储器访问
一次寄存器存取
? 需加临时寄存器存放指令执行的中间结果
? 同一个功能部件能在不同的时钟中被重复使用
? 可用有限状态机来表示指令执行流程,并以此设计控制
单周期,多周期和流水线处理器的比较
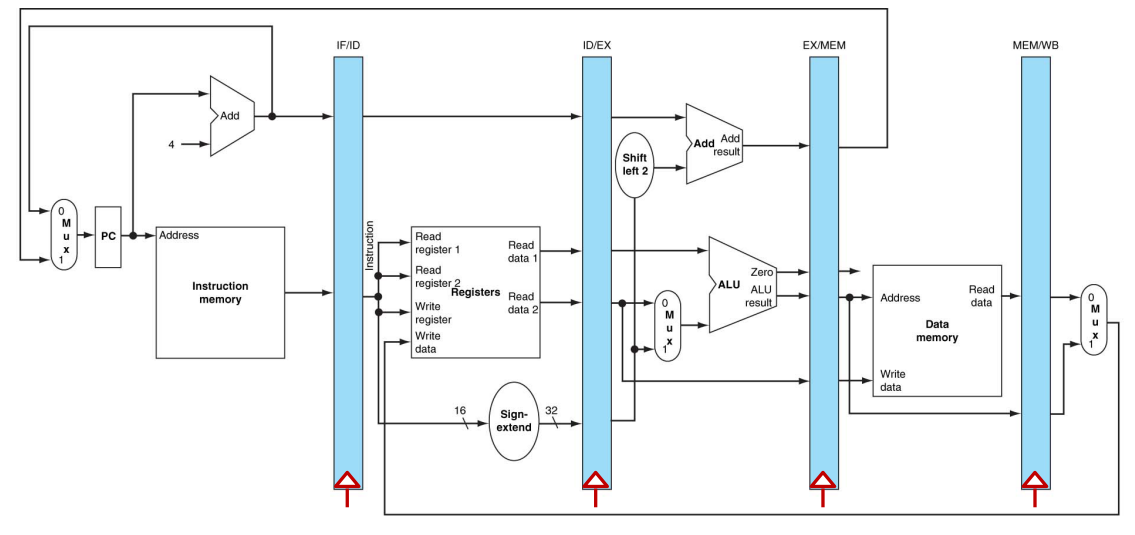
流水线 MIPS32 数据通路概览
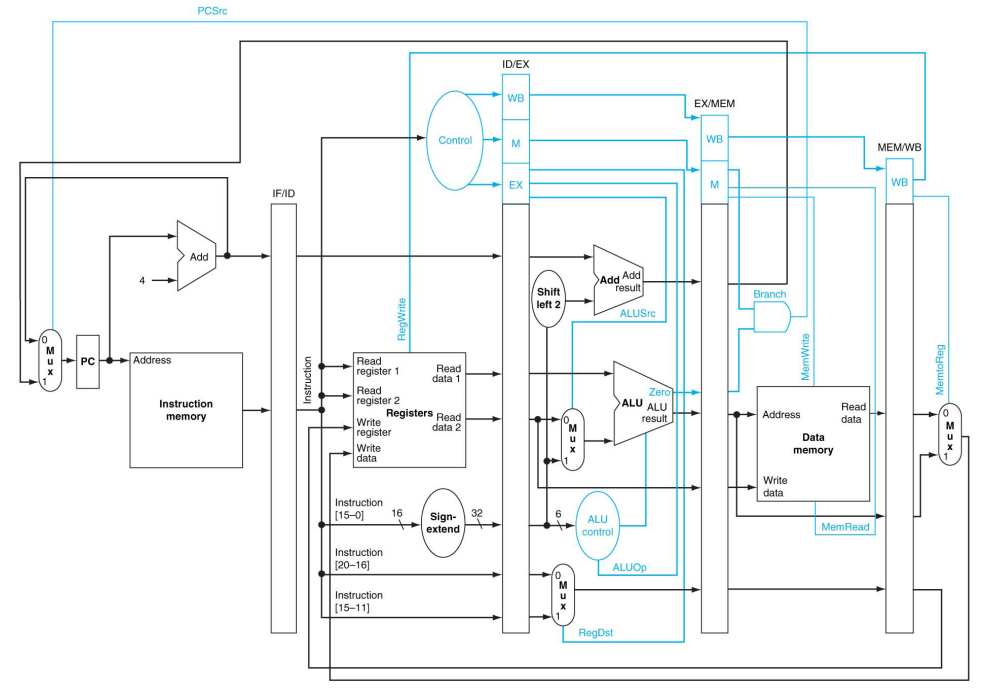
带控制信号的流水线数据路径
流水线数据路径,具有用于处理冒险(hazards)和异常(exceptions)的控制措施
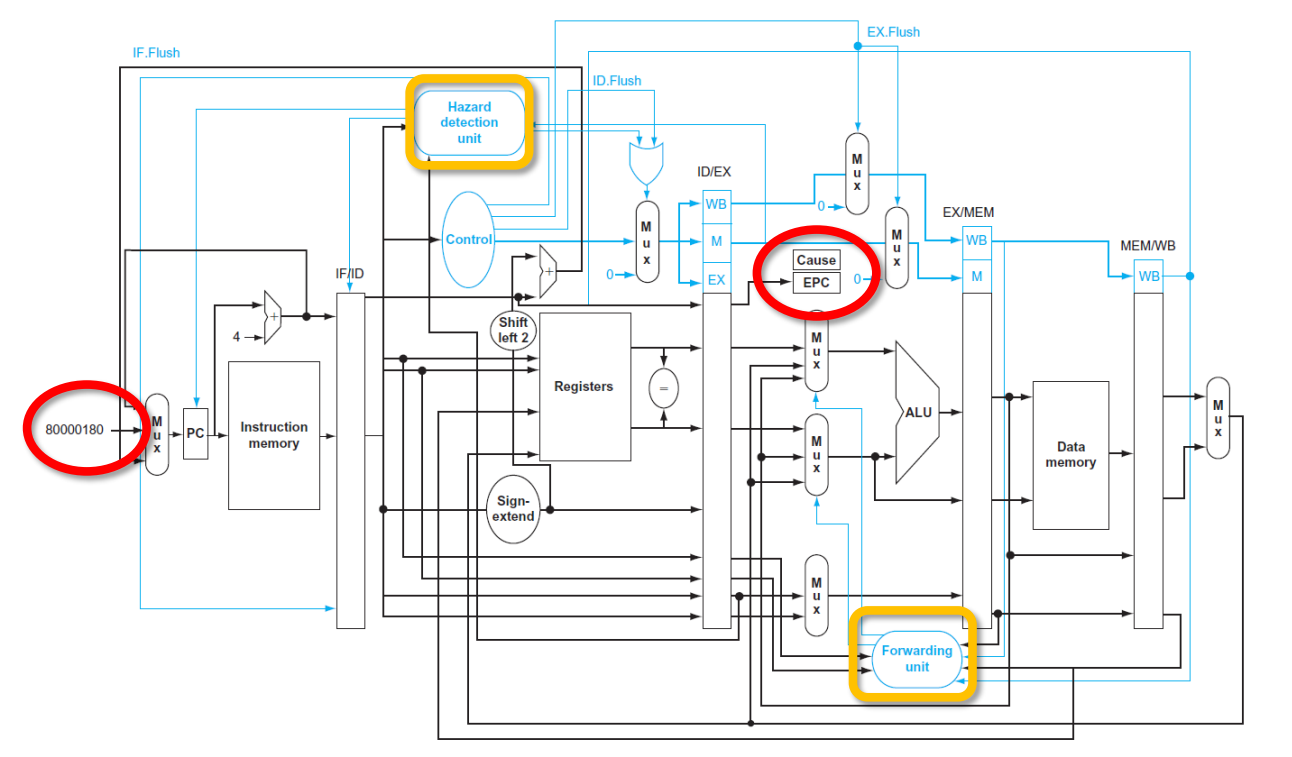
黄线框框表示处理冒险的部分,红色圆圈表示处理异常的部分。
异常(Exception)和中断(Interrupt)
°程序执行过程中CPU会遇到一些特殊情况,使正在执行的程序被“打断”
? 此时,CPU中止原来正在执行的程序,转到处理异常情况或特殊事件的程序去执行,执行后再返回到原被中止的程序处(断点)继续执行
° 程序执行被 “打断” 的事件有两类
? 内部“异常”:在CPU内部发生的意外事件或特殊事件
按发生原因分为硬故障中断和程序性中断两类
硬故障中断:如电源掉电、硬件线路故障等
程序性中断:执行某条指令时发生的“例外”,如算术溢出、缺页、越界、越权、非法指令、除数为0、堆栈溢出、访问超时、断点设置、单步、系统调用等
? 外部“中断”:在CPU外部发生的特殊事件
通过“中断请求”信号向CPU请求处理。如实时钟、控制台、打印机缺纸、外设准备好、采样计时到、DMA传输结束等
° 通常,异常指控制流中任何意外改变,中断特指来自外部事件
° 中断处理(Interrupt handling,或称中断服务程序)用来处理异常和中断
° CPU周而复始执行指令
? 执行指令过程中,若发现异常,则立即转异常处理(或作出检测标记,记录原因,并到指令最后阶段再处理)
? 每个指令结束,查询有没有中断请求,有则响应中
作业
问题1(Amdahl定律)
在实现一个应用程序的并行化时,理想加速比应当等于处理器的个数。但它受到两个因素的限制:可并行化的应用程序百分比和通信成本。Amdahl 定律考虑了前者,但没有考虑后者。
- 如果应用程序的 80%可以并行化N个处理器的加速比为多少?(忽略通信成本)
- 如果每增加一个处理器,通信开销为原执行时间的 0.5%,则8个处理器的加速比为多少?
- 如果处理器数目每增加一倍,通信开销增加原执行时间的 0.5%,则8个处理器的加速比为多少?
- 如果处理器数目每增加一倍,通信开销增加原执行时间的 0.5%,则N个处理器的加速比为多少?
- 写出求解这一问题的一般公式:如果一个应用程序 P%的原执行时间可以并行化并且处理器数目每增加一倍,通信成本增加原执行时间的 0.5%,则达到最高加速比的处理器数目为多少?
解:
Amdahl定律
S
p
e
e
d
_
u
p
=
o
r
i
g
i
n
_
t
i
m
e
o
p
t
i
m
a
l
_
t
i
m
e
=
t
t
×
s
+
t
×
p
n
=
1
s
+
p
n
Speed\_up=\frac{origin\_time}{optimal\_time}=\frac{t}{t\times s+\frac{t\times p}n}=\frac{1}{s+\frac{p}n}
Speed_up=optimal_timeorigin_time?=t×s+nt×p?t?=s+np?1?,其中s表示只能串行的比例,p表示并行的比例,n表示处理器个数。
修改版Amdal定律:
S
p
e
e
d
_
u
p
=
o
r
i
g
i
n
_
t
i
m
e
o
p
t
i
m
a
l
_
t
i
m
e
+
c
o
m
m
u
n
i
c
a
t
i
o
n
_
t
i
m
e
=
t
t
×
s
+
t
×
p
n
+
t
′
=
1
s
+
p
n
+
t
′
Speed\_up=\frac{origin\_time}{optimal\_time+communication\_time}=\frac{t}{t\times s+\frac{t\times p}{n}+t'}=\frac{1}{s+\frac{p}{n}+t'}
Speed_up=optimal_time+communication_timeorigin_time?=t×s+nt×p?+t′t?=s+np?+t′1?,公式中的
t
′
t'
t′表示通信所用时间。
a. S p e e d _ u p = 1 0.8 + 0.2 N \begin{aligned}Speed\_up=\frac{1}{0.8+\frac{0.2}{N}}\end{aligned} Speed_up=0.8+N0.2?1??
b. S p e e d _ u p = 1 0.8 + 0.2 8 + 8 × 0.005 Speed\_up=\frac{1}{0.8+\frac{0.2}8+8\times0.005} Speed_up=0.8+80.2?+8×0.0051?
c. S p e e d _ u p = 1 0.8 + 0.2 8 + ( log ? 2 8 ) × 0.005 Speed\_up=\frac{1}{0.8+\frac{0.2}{8}+(\log_{2}8)\times0.005} Speed_up=0.8+80.2?+(log2?8)×0.0051?
d. S p e e d _ u p = 1 0.8 + 0.2 N + ( log ? 2 N ) × 0.005 Speed\_up=\frac{1}{0.8+\frac{0.2}{N}+(\log_{2}N)\times0.005} Speed_up=0.8+N0.2?+(log2?N)×0.0051?
e. S p e e d _ u p = 1 ( l ? P % ) + P % N + ( log ? 2 N ) × 0.005 Speed\_up=\frac{1}{(l-P\%)+\frac{P\%}N+(\log_2N)\times0.005} Speed_up=(l?P%)+NP%?+(log2?N)×0.0051?,对此式求导令其等于0得最大值 N = 2 P l n 2 N=2Pln2 N=2Pln2
问题2(流水线、CPI、加速比)
我们首先考虑一个采用单周期实现的计算机。在按功能分制流水级时,这些流水级需要的时间不一定相同。原机器的时钟周期时间为 7 ns。在流水线被分之后,测得的时间数据为:IF,1ns; ID,1.5s; EX,1ns; MEM,2ns; WB,1.5ns。流水线寄存器延迟为0.1ns。
a.5 级流水化机器的时钟周期时间为多少?
b.如果每4条指令有一次停顿,则新机器的 CPI为多少?
c.流水化机器相对于单周期机器的加速比为多少?
d.如果流水化机器有无限个流水级,那它相对于单周期机器的加速比为多少?
解:
我们假定流水线的CPI=1.
a. 找最大延迟时间的阶段为MEM,所以周期为2+0.1=2.1ns。
b.CPI为每条指令平均所花费的时钟周期数。这道题我们假设流水线已经流起来了,也即每个周期都能执行一条指令。所以
C
P
I
=
5
4
=
1.25
CPI=\frac{5}{4}=1.25
CPI=45?=1.25
c. S p e e d _ u p = ( I C × C P I × c y c l e _ t i m e ) s i n g l e ( I C × C P I × c y c l e _ t i m e ) m u l i i = 7 1.25 × 2.1 = 2.67 Speed\_up=\frac{(IC\times CPI\times cycle\_time)_{single}}{(IC\times CPI\times cycle\_time)_{mulii}}=\frac{7}{1.25\times2.1}=2.67 Speed_up=(IC×CPI×cycle_time)mulii?(IC×CPI×cycle_time)single??=1.25×2.17?=2.67
d. S p e e d _ u p = ( I C × C P I × c y c l e _ t i m e ) s i n g l e ( I C × C P I × c y c l e _ t i m e ) m u l t i = 7 0.1 = 70 Speed\_up=\frac{(IC\times CPI\times cycle\_time)_{single}}{(IC\times CPI\times cycle\_time)_{multi}}=\frac7{0.1}=70 Speed_up=(IC×CPI×cycle_time)multi?(IC×CPI×cycle_time)single??=0.17?=70
以上就是本篇博文,下一篇我们来讲复杂CPU流水线与乱序执行
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!