雷达遮挡检测综述
1 概述??
????????雷达(毫米波、激光)的遮挡是实际项目中比较常见的现象,优秀的算法应当能够及时、准确地检测出雷达是否被遮挡,以及遮挡的严重程度,然后将故障信息发送给诊断系统,并在仪表盘上显示,如图1所示。本文总结多个发明专利的方法,并提出了一种点迹端判断(毫米波)雷达遮挡的方法。

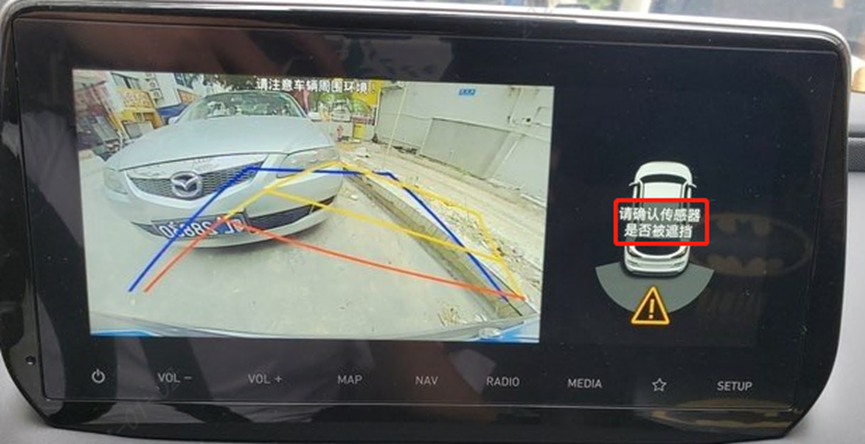
图1 雷达遮挡报警
2 专利汇总
2.1 雷达性能监测方法、装置及存储介质
?????? 申请(权利)人:南京隼眼电子科技有限公司
?????? 申请号:CN202210595738.1
?????? 摘要:本发明提供了一种雷达性能监测方法、装置及存储介质,其中,所述方法包括:根据当前帧的回波信号确定每个目标点对应的实测距离值和信噪比,并基于全部实测距离值和信噪比估计当前帧对应的融合推断距离,其中,所述融合推断距离指示估计出的所述雷达的最大探测距离;对所述当前帧对应的融合推断距离进行滤波处理以得到当前帧对应的决策判决值;将所述当前帧对应的决策判决值与预设的至少一个阈值相比较以确定所述雷达的当前工作状态。采用本发明实施例提供的技术方案能够实现雷达遮挡性能实时自检测并确定所述雷达的当前工作状态,且该方法鲁棒性强,能够对恶劣天气或环境因素造成的雷达性能退化做出反应,有效保证了车载雷达对环境的感知能力。
2.2 雷达遮挡检测方法及雷达
?????? 申请(权利)人:森思泰克河北科技有限公司
?????? 申请号:CN201910887609.8
????????摘要:本发明适用于雷达技术领域,提供了一种雷达遮挡检测方法及雷达,该雷达遮挡检测方法包括:获取第一时长内雷达的多帧回波信号,并对多帧回波信号分别进行傅里叶变换,得到各帧回波信号分别对应的频谱图;获取第一频点区域内各频点的标准幅值及第二频点区域内各频点的标准幅值,并根据各频点的标准幅值及各帧回波信号分别对应的频谱图,确定各帧回波信号是否满足预设条件;若满足预设条件的回波信号的帧数大于或等于帧数阈值,则判定雷达被遮挡。该雷达遮挡检测方法根据雷达回波信号的频谱特性确定雷达是否被遮挡,准确率高,不易造成误判,可及时提醒用户对雷达遮挡物进行清理,从而避免雷达遮挡造成的经济损失及安全隐患。
2.3 一种车载雷达遮挡检测方法、存储介质及车载设备
?????? 申请(权利)人:惠州市德赛西威汽车电子股份有限公司
?????? 申请号:CN202011536560.0
????????摘要:本发明涉及车载雷达的技术领域,尤其涉及一种车载雷达遮挡检测方法、存储介质及车载设备。所述方法包括:获取车载雷达回波数据,计算得到当前车载雷达的距离?多普勒图;根据该距离?多普勒图和车载雷达速度信息,得到距离?多普勒图相对功率值的有效统计分布情况;将当前有效统计分布情况与遮挡状态下的参考统计分布情况进行相似度比对;若相似度低于预设阈值,则判定车载雷达未被遮挡,否则,结合逻辑判断,判定车载雷达存在遮挡。本发明利用存在于雷达的接收信号中的杂波,即与雷达探测时保持绝对静止的所有反射物体的回波,有效地实现了车载毫米波雷达的遮挡状况检测,适用性广且受外界干扰小,鲁棒性强。
2.4 一种雷达遮挡检测方法、装置及终端设备
?????? 申请(权利)人:森思泰克河北科技有限公司
?????? 申请号:CN202110545989.4
????????摘要:本发明适用于雷达技术领域,提供了一种雷达遮挡检测方法、装置及终端设备,该方法包括:将目标雷达的探测范围划分为多个子区域,根据各个子区域的点云数据分别计算各个子区域的点云整体熵;根据各个子区域内的点云数据分别对各个子区域内的点云进行聚类,在每个子区域内得到至少一个聚类目标,根据各个聚类目标的目标数据计算各个子区域对应的目标整体熵;根据各个子区域对应的点云整体熵和目标整体熵计算目标雷达在当前场景下的熵值,并根据熵值判断目标雷达是否被遮挡。本发明提供的雷达遮挡方法能够根据点云数据计算目标雷达的熵值,进一步的根据熵值准确地判断雷达是否被遮挡。
2.5 一种基于幅度变化率分析的车载毫米波雷达遮挡检测方法
?????? 申请(权利)人:惠州市德赛西威智能交通技术研究院有限公司
?????? 申请号:CN202010268246.2
????????摘要:本发明涉及一种基于幅度变化率分析的车载毫米波雷达遮挡检测方法,包括:分别获取异物直接覆盖条件下和无异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号的FFT幅度变化率信息,根据该FFT幅度变化率信息与当前时刻的毫米波雷达多个通道的时域回波信号的FFT幅度变化率的比较结果判断毫米波雷达是否被遮挡。本发明通过对毫米波雷达的各通道时域回波信号的FFT的幅度变化率进行分析,以对毫米波雷达的遮挡情况进行判断,从而有效地实现了车载毫米波雷达的遮挡状况检测,同时,该方法对算力要求较低,在保证了车载毫米波雷达系统对环境的实时感知的同时,也满足车载毫米波雷达自诊断功能的实时性。
2.6 雷达视野受限场景识别方法、存储介质及车载设备
?????? 申请(权利)人:惠州市德赛西威智能交通技术研究院有限公司
?????? 申请号:CN202110732269.9
????????摘要:本发明涉及一种雷达视野受限场景识别方法,包括对全视野受限场景的识别步骤,包括:基于雷达回波得到目标检测频谱信息;依据移动设备的速度信息及雷达的参数指标,计算绝对静止的目标的检测频谱信息的幅度骤降点H;计算所述幅度骤降点H前、后预设距离段内的幅度分布差异;当所述幅度分布差异大于或等于预设阈值时,判断当前雷达所处环境为全视野受限场景。本发明还提供了一种存储介质及车载设备。本发明的雷达视野受限场景识别方法适宜应用于装载在可移动设备上的雷达,充分考虑了全视野受限场景可能存储的情况,有效地实现了雷达对自身视野受限场景情况进行自检测,改善了雷达系统自诊断功能的准确性,且满足雷达诊断应用的实时性。
2.7 雷达遮挡情况的判断方法、装置、电子设备及存储介质
?????? 申请(权利)人:森思泰克河北科技有限公司
?????? 申请号:CN202111646601.6
????????摘要:本发明提供一种雷达遮挡情况的判断方法、装置、电子设备及存储介质。其雷达配置有两个以上的接收天线和两个以上的发射天线,该方法通过各发射天线反馈在目标接收天线的第一回波信号的能量分布特征值,判断目标接收天线的被遮挡情况,通过各接收天线分别接收的对应于目标发射天线的第二回波信号的能量分布特征值,判断目标发射天线的被遮挡情况,实现了对雷达遮挡情况的判断,判断速度快。
2.8 激光雷达遮挡检测方法、装置、存储介质及激光雷达
?????? 申请(权利)人:深圳市速腾聚创科技有限公司
?????? 申请号:CN202111024603.1
????????摘要:本申请公开了一种激光雷达遮挡检测方法、装置、存储介质及激光雷达,其中方法包括:获取探测的回波数据,获取所述回波数据中每个点的距离信息,将所述距离信息与预设的距离范围进行比较,若所述距离信息在所述预设的距离范围内,则确定所述激光雷达被遮挡。采用本申请,可以在既不影响激光雷达的透光率也不增加激光雷达的制造成本的前提下,实时检测激光雷达是否被遮挡。
2.9 一种基于幅度特征统计的车载毫米波雷达遮挡检测方法
?????? 申请(权利)人:惠州市德赛西威汽车电子股份有限公司
?????? 申请号:CN202010268328.7
????????摘要:本发明涉及一种基于幅度特征统计的车载毫米波雷达遮挡检测方法,包括:分别获取异物直接覆盖条件下和无异物直接覆盖条件下的毫米波雷达多个通道的时域回波信号的FFT的幅度变化特征统计分析,根据该FFT的幅度变化特征统计分析结果与当前时刻的毫米波雷达多个通道的时域回波信号的FFT的幅度变化特征统计分析结果的比较结果判断毫米波雷达是否被遮挡。本发明通过对毫米波雷达的各通道时域回波信号的FFT的幅度变化特征进行统计分析,以对毫米波雷达的遮挡情况进行判断,从而有效地实现了车载毫米波雷达的遮挡状况检测,同时,该方法对算力要求较低,在保证了车载毫米波雷达系统对环境的实时感知的同时,也满足车载毫米波雷达自诊断功能的实时性。
2.10 雷达遮挡情况的判断方法、装置、电子设备及存储介质
?????? 申请(权利)人:森思泰克河北科技有限公司
?????? 申请号:CN202111646559.8
????????摘要:本发明提供一种雷达遮挡情况的判断方法、装置、电子设备及存储介质。该方法包括:获取第一回波强度信息,并基于第一回波强度信息构建雷达的实测方向图;第一回波强度信息为雷达的回波信号中指定目标反馈的实时回波强度信息;将实测方向图与预设的离线方向图进行比较;实测方向图和离线方向图均为雷达对于指定目标的监测角度?回波强度图;若与离线方向图相比,实测方向图存在回波强度满足第一条件的监测角度,则判定雷达处于被遮挡状态;第一条件包括:监测角度在实测方向图对应的回波强度,低于该监测角度在离线方向图对应的回波强度。本发明能够实现对雷达遮挡情况的判断,判断效率高。
2.11 一种雷达遮挡检测方法、装置、设备以及存储介质
?????? 申请(权利)人:中国第一汽车股份有限公司
?????? 申请号:CN202310559406.2
????????摘要:本发明公开了一种雷达遮挡检测方法、装置、设备以及存储介质。该方法包括:基于预设的雷达目标检测算法,采用雷达发出雷达射线,并根据反馈结果,确定检测点数量和地面回波幅值;根据检测点数量和地面回波幅值,进行雷达遮挡检测,初步估计雷达是否处于被遮挡状态;若是,则结合摄像头的感知结果,精确分析雷达是否被遮挡,以生成雷达遮挡检测结果。本发明的技术方案,可以有效对雷达周边的环境信息进行感知,更全面准确的判断出雷达是否被遮挡的情况。
2.12 车载毫米波雷达遮挡检测方法、装置、设备及存储介质
?????? 申请(权利)人:中汽创智科技有限公司
?????? 申请号:CN202311074269.X
????????摘要:本申请提供一种车载毫米波雷达遮挡检测方法、装置、设备及存储介质,该方法包括:在预设时间段内,获取待测雷达接收到的目标数据和所述待测雷达所在的车辆的行驶速度,生成所述目标数据在预设距离区间上的功率谱;对所述功率谱的功率值进行搜索,得到目标功率值;比较所述目标功率值和预设功率阈值,统计所述预设时间段内的所述目标功率值小于所述预设功率阈值的次数;在预设时间周期内,重复所述获取待测雷达接收到的目标数据至所述得到所述预设时间段内的功率比较结果为止的目标操作,确定所述预设时间周期内所述目标功率值小于所述预设功率阈值的目标次数;根据所述目标次数和预设次数阈值之间的比较结果,确定所述待测雷达的遮挡结果。
2.13 一种检测汽车雷达遮挡状态的方法及装置
?????? 申请(权利)人:北京行易道科技有限公司
?????? 申请号:CN201811117553.X
????????摘要:本申请提供了一种检测汽车雷达遮挡状态的方法及装置,其中,该方法包括:通过毫米波汽车雷达向预设方向发射调频带宽为第一预设值的第一线性调频信号;所述第一预设值的数值大小为0.1GHZ?12GHZ;通过毫米波汽车雷达接收与所述第一线性调频信号相对应的第一反射信号;检测所述第一反射信号的强度;根据第一反射信号的强度确定毫米波汽车雷达的遮挡状态。本申请实施例通过设置毫米波雷达调频斜率,以使毫米波雷达的距离分辨率可以分辨毫米波雷达近距离上的障碍物,检测方式简单且可靠性较高。
2.14 一种CFAR后峰值点统计的车载雷达失效检测方法
?????? 申请(权利)人:惠州市德赛西威智能交通技术研究院有限公司
?????? 申请号:CN202010118806.6
????????摘要:本申请涉及一种基于CFAR后峰值点统计的车载雷达失效检测方法,应用于车载电子设备中,所述方法包括:实时监测并获取车载雷达的ADC数据,并对ADC数据的距离维进行加窗处理;将加窗处理后的ADC数据通过二维FFT进行转换,生成2D?MAP数据;对所述2D?MAP数据进行处理,获取峰值点数据;将所述峰值点数据与预设值进行比对,判断并输出当前车载雷达是否失效。其有益效果在于,本申请通过采用CFAR峰值点统计,为车载雷达失效的检测依据,能有效的区分车载雷达非遮挡场景和车载雷达遮挡场景,以及避免“沙漠”场景下功能失效报警的误触发,极大的提高了行车安全性。
2.15 车载毫米波雷达遮挡检测方法、装置、设备及介质
?????? 申请(权利)人:东风汽车集团股份有限公司
?????? 申请号:CN202310690191.8
????????摘要:本发明公开了一种车载毫米波雷达遮挡检测方法、装置、设备及介质,其中车载毫米波雷达遮挡检测方法包括以下步骤:在沿预设方向运动过程中,以雷达的FOV范围内跟踪目标,确定可能遮挡角度区域;根据连续多个预设周期内在所述可能遮挡角度区域内监测到的目标个数,确定雷达被遮挡。有益效果:可精准的识别出是哪个雷达的那个区域被遮挡,精准度高。
2.16 雷达遮挡物检测方法及装置
?????? 申请(权利)人:华为技术有限公司
?????? 申请号:CN202010116525.7
????????摘要:本申请提供一种雷达遮挡物检测方法及装置,所述方法包括:确定在第一采样时间单元接收到的第一反射光束的强度,进而根据第一反射光束的强度,确定雷达视窗上存在遮挡物。其中,第一反射光束是雷达在第一发射时间单元发射出射光束后,在第一采样时间单元接收到的反射光束,第一采样时间单元的结束时刻与第一发射时间单元之间的时间间隔是根据出射光束的发射位置到雷达视窗的距离,以及雷达视窗到第一反射光束的接收位置的距离确定的。通过本申请可以对雷达视窗的遮挡物进行检测,以提升雷达的探测准确率。
2.17 一种雷达遮挡检测方法及计算机存储介质
?????? 申请(权利)人:上海蛮酷科技有限公司
?????? 申请号:CN202010603856.3
????????摘要:本发明涉及一种雷达遮挡检测方法及计算机存储介质,该方法包括以下步骤:在同一场景下采集不同遮挡程度下的雷达回波信号,构建训练数据集;通过训练数据集对神经网络进行迭代优化训练,得到训练后的神经网络;基于训练后的神经网络对实时雷达回波信号进行测试,以对雷达的遮挡程度进行检测。本发明通过采用神经网络算法,准确的检测复杂坏境下的雷达表面遮挡程度,以用于提醒用户进行维护,为雷达目标识别的准确性和稳定性提供良好的保障。
2.18 雷达遮挡物的检测方法及装置、计算机设备、芯片、终端
?????? 申请(权利)人:青岛慧拓智能机器有限公司
?????? 申请号:CN202210662153.7
????????摘要:本发明公开了一种雷达遮挡物的检测方法及装置、计算机设备、芯片、终端,涉及检测技术领域,主要目的在于解决现有矿区中车辆雷达遮挡物的检测效率的问题。主要包括:获取不同类型雷达采集的实时点云帧;基于时间阈值确定与所述实时点云帧对应的目标点云帧;统计所述实时点云帧与所述目标点云帧之间的点云帧总数量以及异常点云帧数量;若所述异常点云帧数量与所述点云帧总数量的比值大于异常帧数量占比阈值,则确定所述雷达被遮挡,实现雷达遮挡物的检测。
2.19 一种雷达遮挡检测方法、装置、设备及存储介质
?????? 申请(权利)人:福瑞泰克智能系统有限公司
?????? 申请号:CN202011312518.0
????????摘要:本申请涉及一种雷达遮挡检测方法、装置、设备或存储介质,该方法包括:获取所有目标点的角度频谱;基于角度频谱确定所有目标点的检测角度和主旁瓣比;获取所有目标点中静态目标的理论角度;根据静态目标的检测角度与理论角度确定静态目标的误差角度;基于多帧雷达回波信号下静态目标的误差角度生成误差角度分布图,并从误差角度分布图中确定出主要误差角度与主瓣宽度;基于多帧雷达回波信号下所有目标点的主旁瓣比生成主旁瓣比累计分布图,并从主旁瓣比累计分布图中确定出低于预设主旁瓣比的目标点比例;根据主旁瓣比累积分布图和误差角度分布图确定雷达遮挡情况。如此,可以提高检测遮挡物的敏感性,且运算力少,可以提高检测效率。
?????? 综合来看,遮挡检测普遍使用了回波的幅值信息,有的是原始ADC数据做FFT后的数据,有的是选取了CFAR的峰值点或各种策略之后得到的点迹幅值,或者是幅值的变化信息。另外,不少会利用点迹数量或分段、分区域检测的方法,还有将雷达与摄像头结合的方法。
3 基于运动目标点迹理论距离的雷达遮挡检测
?????? 考虑到车载雷达大都在市区驾驶,极小概率出现被泥土、雨雪完全遮挡的情况,而且刚遮挡的时候仍能检测到目标,因此考虑对雷达检测到的运动点迹特征做统计分析。
????????不同距离段的目标不一样,比如远距离只有车辆,近距会有行人和两轮车,因此划分距离段可以得到更显著的特征。同时考虑到速度和角度异常值会影响结果,因此剔除低速(0.5m/s)和高速(30m/s)目标,并且只选取±45°内的点迹。
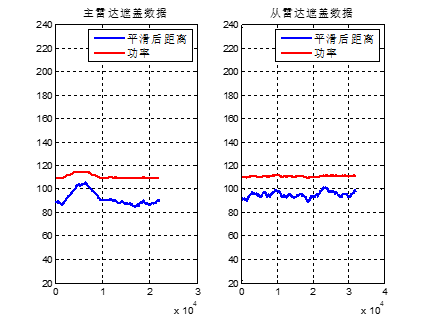
?????? 这里对主从两个角雷达采集了泥土遮挡下的数据,计算多个运动目标点迹平滑后的归一化距离。归一化距离定义为同一信噪比条件下的检测距离,如果信噪比大于或小于预设信噪比,则根据雷达方程做调整。
3.1 无遮挡情况
?????? 10~20m,主雷达约90~110,从雷达约90~100m。
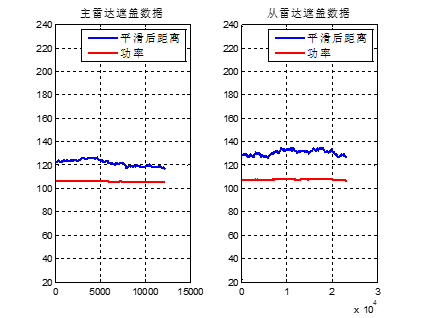
????????20~30m,主雷达约120~130,从雷达约120~140m。
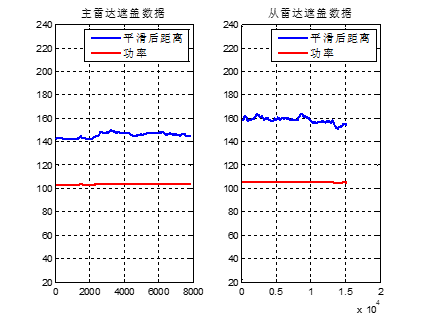
????????30~40m,主雷达约140~150,从雷达约150~160m。
?????? 40~50m,主雷达约140~160,从雷达约150~170m。
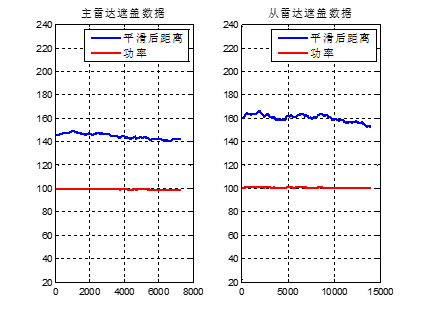
?????? 平均来看,20~30m,约125 = 110 + 15;30~40m,约140 = 125 + 15;40~50m,约155 = 140 + 15;50~60m,约170 = 155 + 15;60~70m,约185 = 170 + 15;70~80m,约200 = 185 + 15。则有经验公式,Score = 110+1.5*(R-15) = 87.5+1.5R为了将其统一,则将得分归一化,计算统一的距离值。
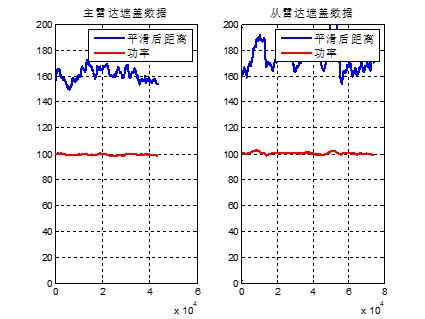
3.2 无遮挡和遮挡统一平滑距离对比
????????20~100m累计,左图是无遮挡的左右后角雷达,右图是遮挡的左右后角雷达,平滑距离在140m处有明显区分。


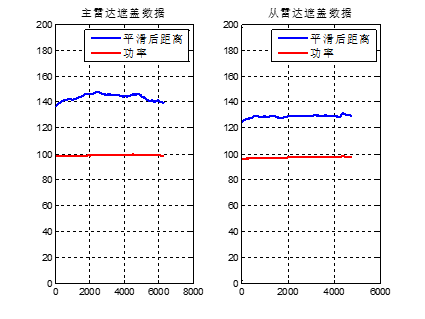
????????30~110m累计,左图是无遮挡的左右后角雷达,右图是遮挡的左右后角雷达,平滑距离在150m处有明显区分。
????????如果平滑点数增加,平滑距离更平稳。20~100m累计,左图是无遮挡的左右后角雷达,右图是遮挡的左右后角雷达,平滑距离在140m处有明显区分。
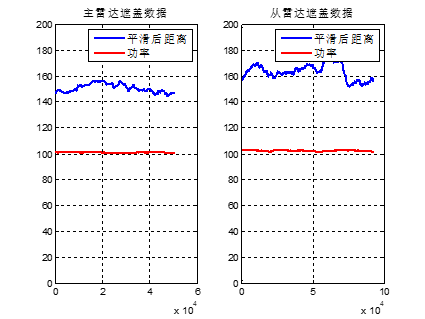

?????? 可以看到,该方法可以通过简单的处理得到良好的雷达遮挡区分效果。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!