【强化学习-读书笔记】表格型有模型和无模型的结合、Dyna-Q、Dyna-Q+、表格型方法的总结
参考
Reinforcement Learning, Second Edition
An Introduction
By Richard S. Sutton and Andrew G. Barto
前面的方法要么是单纯的 model-based ** 方法,要么是 model-free。基于模型的方法将规划作为其主要组成部分,而无模型的方法则主要依赖于学习**。
实际上我们可以是将基于模型的方法和无模型的方法整合起来,推广得到一个广义的学习方式。
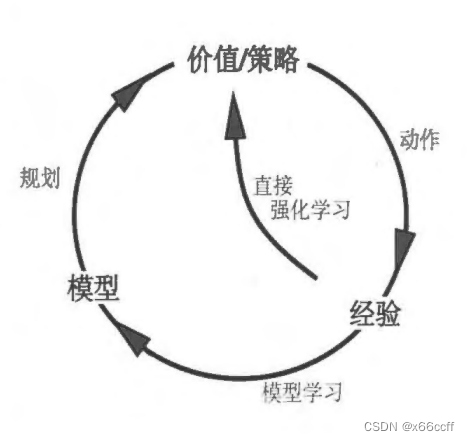
模型选择动作,从环境中得到的经验,一方面用于直接强化学习(无模型思路),另一方面这些经验同时用于环境模型的训练(有模型),然后环境模型用于规划/训练/更新价值或者策略,经验被间接的用于更新价值/策略函数 V , Q V,Q V,Q
间接方法往往能更充分地利用有限的经验,从而获得更好的策略,减少与环境的相互作用(例:RLHF)。
另一方面,直接方法则简单得多,它不受模型的设计偏差的影响。
Model-based : “原理认知”、“主动的预谋性规划”
Model-free:“试错学习”、“被动的反应式决策”
Dyna
一般的 Dyna 架构
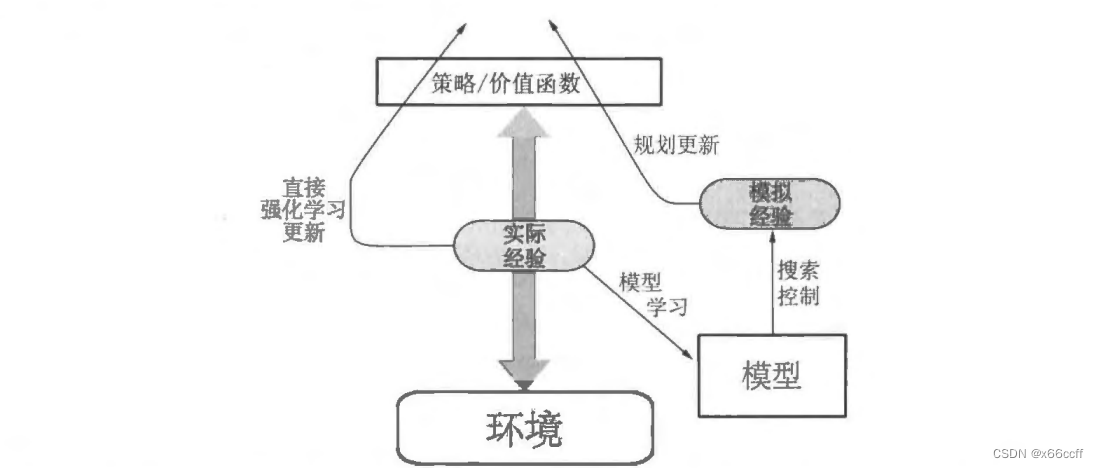
真正的经验在环境和策略之间来回传递,影响策略和价值函数,就像环境模型产生的模拟经验一样。
表格型 Dyna-Q
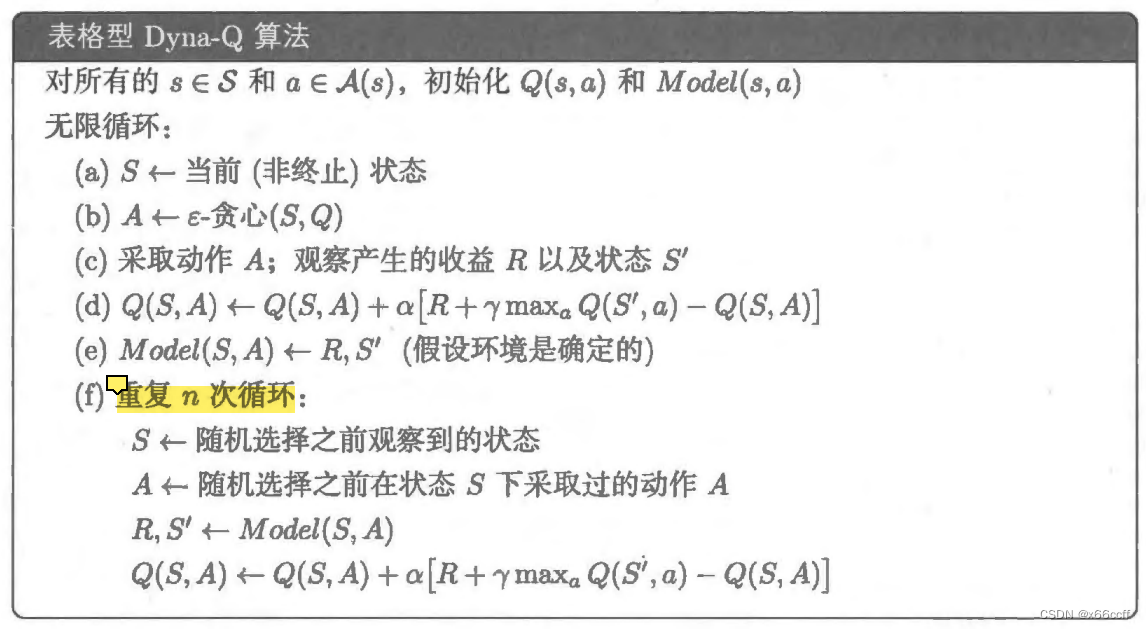
注意是每一步都重复 n n n次,而不是每一幕,每走一步就开始(类似于)经验回放。
所以将规划和动作融合起来是很简单的,两者都以尽可能快的速度进行。智能体既是反应式的也是预谋式的,它总是立即对最新的传感信息给予反馈回应,但也同时总是在后台不断地进行规划。
考虑到很多情况下,环境的响应也是需要时间的,因此算法如果有多余的计算能力,就可以用于规划部分进行更新。Dyna-Q 里面的这个 Model 有一点像经验回放,在下棋这个场景里面,就是在下了一步棋之后,等对手下的过程中,开始通过随机回放之前自己的动作 ( s , a , r , s ′ ) (s,a,r,s') (s,a,r,s′),不断更新自己的Q,等下一步开始的时候(对手行棋完毕),Q实际上已经更新了很多次了。
从走迷宫的例子分析 Dyna-Q 为什么更好
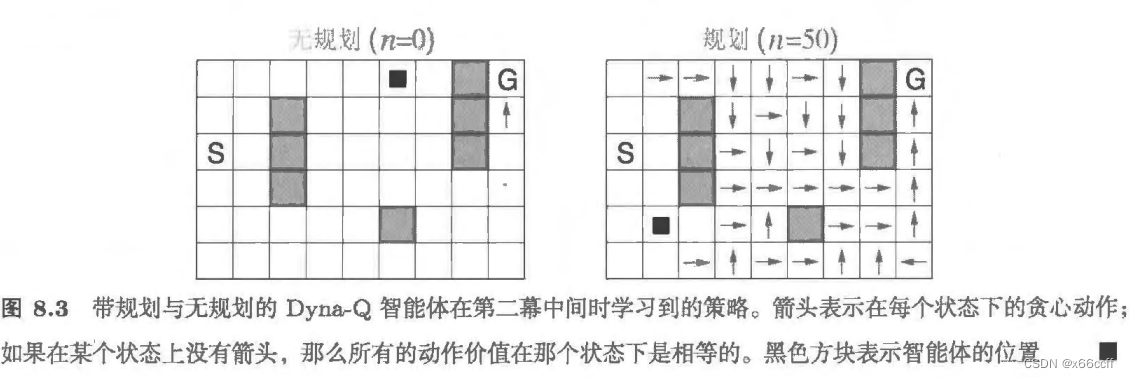
在书中的例子中, Dyna-Q 进行了 2 幕就找到了一个很不错的策略。我们从这里例子入手,分析为什么 Dyna-Q 能够这么快。
第一幕开始,
绝大多数动作收益都是0,因此 Q <- 0,算法处于近似随机游走的状态
每走完一步,算法进行规划更新,for 1:50 随机采样 s,a
Q(s,a) <- 0
直到智能体走到 G 点, Q <- 1
for 1:50 随机采样 s,a
Q(s,a) <- 大于0的数,if 采样到了靠近 G 点的为位置,
这个采样概率随着更新为大于0的位置的数量增多,概率也逐渐增大,
于是表现为箭头开始从 G 点逐渐往起点扩展,从而形成一个较优的策略
第二幕开始,
同理,在第二幕中间就已经可以得到一个不错的策略了。
Dyna-Q+ :用探索奖励鼓励很久没有探索过的位置
最初,最优路径绕过屏障 (左上) 然而,在 3000 步之后,沿着右侧打开一条较短路径,而它不会影响较长的路径(右上角) 图表显示,普通 Dyna-Q 不会切换到捷径。事实上,它从未意识到新路径的存在它的模型说没有捷径,所以它规划得越多,就越不可能走到右边发现它 即使使用了一个 ? \epsilon ?-贪心策略,智能体也不太可能采取足够大量的试探动作来发现捷径.
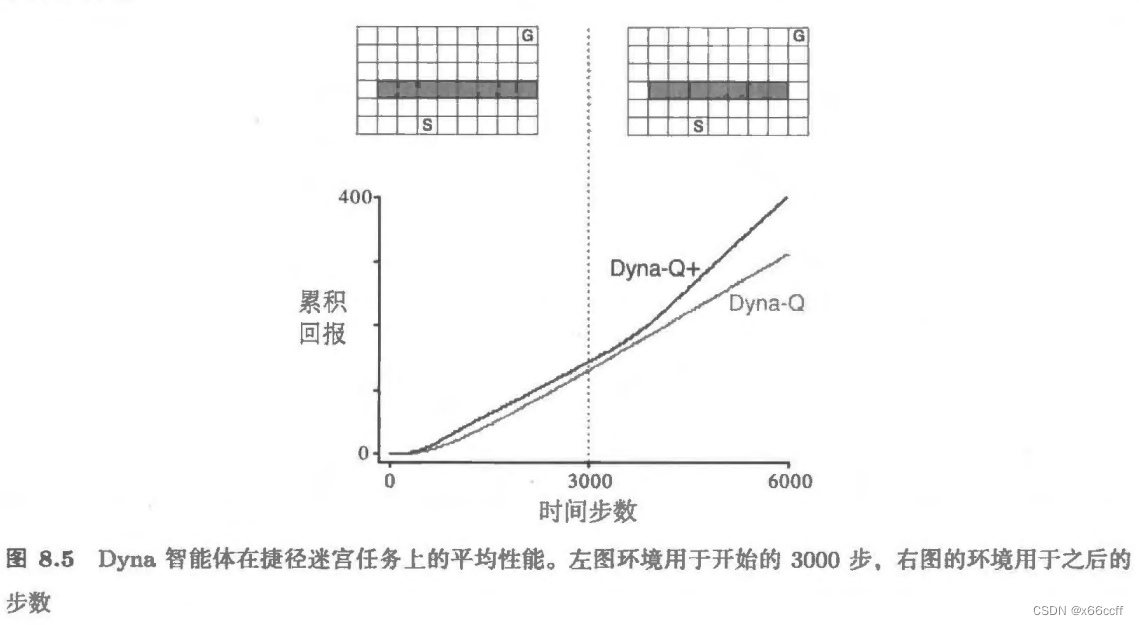
Dyna-Q+ 在环境不平稳的时候表现更好,因为鼓励了智能体探索很久没有探索过的地方。
Dyna-Q+为动作相关的模拟经验设置的“额外收益”将会提供给智能体。如果模型对单步转移的收益是 r r r,而这个转移在 τ \tau τ时刻内没有被尝试,那么在更新时就会采用 r + κ r r+\kappa \sqrt{r} r+κr?的收益,其中 κ \kappa κ是一个比较小的数字。
类似于UCB,太长时间没有访问了就给额外的奖励,让模型去探索这个位置(探索路径的形成是由于一连串的需要探索的位置奖励都增加了)
总结表格型学习
其他分类标准
回报的定义 任务是分幕式还是持续性的,带折扣的还是不带折扣的?
动作价值 、状态价值还是后位状态价值 需要估计哪种价值?如果是状态价值 则在进行动作选择时,要么有一个模型 要么有个独立的策略(如“行动器-评判器”方法)
动作选择/试探 怎样进行动作选择来确保在试探和开发之间做一个合理的平衡?我们已经讨论了一些很简单的方法:
?
\epsilon
?-贪心、价值的乐观初始化、柔性最大化、置信上界
同步还是异步 对于所有状态来说,更新是同时进行的还是按照某种顺序一个接着一个更新?
真实还是模拟仿真 更新基于真实的经验还是模拟的经验?如果两者都有,它们的比例是怎样的?
更新的位置 哪个状态或“状态-动作“ 二元组应该被更新?无模型的方法只能从真实遇到的状态和“状态 动作“二元组中进行选择,但是基于模型的方法就可以任意选择这里有很多种可能的情况
更新的时机 更新是动作选择的一部分,还是在动作选择之后进行?
更新的记忆 更新的价值应该被保存多久?它们应该被永久保存,还是像在启发式搜索中那样仅仅在动作选择期间保存?
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!