OpenMMlab导出CenterNet模型并用onnxruntime和tensorrt推理
2024-01-07 21:24:22
导出onnx文件
直接使用脚本
import torch
import torch.nn.functional as F
from mmdet.apis import init_detector
config_file = './configs/centernet/centernet_r18_8xb16-crop512-140e_coco.py'
checkpoint_file = '../checkpoints/centernet_resnet18_140e_coco_20210705_093630-bb5b3bf7.pth'
model = init_detector(config_file, checkpoint_file, device='cpu') # or device='cuda:0
torch.onnx.export(model, (torch.zeros(1, 3, 512, 512)), "centernet.onnx", opset_version=11)
导出的onnx结构如下:

修改脚本如下:
import torch
import torch.nn.functional as F
from mmdet.apis import init_detector
config_file = './configs/centernet/centernet_r18_8xb16-crop512-140e_coco.py'
checkpoint_file = '../checkpoints/centernet_resnet18_140e_coco_20210705_093630-bb5b3bf7.pth'
class CenterNet(torch.nn.Module):
def __init__(self):
super().__init__()
self.model = init_detector(config_file, checkpoint_file, device='cpu')
def get_local_maximum(self, heat, kernel=3):
pad = (kernel - 1) // 2
hmax = F.max_pool2d(heat, kernel, stride=1, padding=pad)
keep = (hmax == heat).float()
return heat * keep
def get_topk_from_heatmap(self, scores, k=20):
batch, _, height, width = scores.size()
topk_scores, topk_inds = torch.topk(scores.view(batch, -1), k)
topk_clses = topk_inds // (height * width)
topk_inds = topk_inds % (height * width)
topk_ys = topk_inds // width
topk_xs = (topk_inds % width).int().float()
return topk_scores, topk_inds, topk_clses, topk_ys, topk_xs
def gather_feat(self, feat, ind, mask=None):
dim = feat.size(2)
ind = ind.unsqueeze(2).repeat(1, 1, dim)
feat = feat.gather(1, ind)
if mask is not None:
mask = mask.unsqueeze(2).expand_as(feat)
feat = feat[mask]
feat = feat.view(-1, dim)
return feat
def transpose_and_gather_feat(self, feat, ind):
feat = feat.permute(0, 2, 3, 1).contiguous()
feat = feat.view(feat.size(0), -1, feat.size(3))
feat = self.gather_feat(feat, ind)
return feat
def _decode_heatmap(self, center_heatmap_pred, wh_pred, offset_pred, img_shape, k, kernel):
height, width = center_heatmap_pred.shape[2:]
inp_h, inp_w = img_shape
center_heatmap_pred = self.get_local_maximum(center_heatmap_pred, kernel=kernel)
*batch_dets, topk_ys, topk_xs = self.get_topk_from_heatmap(center_heatmap_pred, k=k)
batch_scores, batch_index, batch_topk_labels = batch_dets
wh = self.transpose_and_gather_feat(wh_pred, batch_index)
offset = self.transpose_and_gather_feat(offset_pred, batch_index)
topk_xs = topk_xs + offset[..., 0]
topk_ys = topk_ys + offset[..., 1]
tl_x = (topk_xs - wh[..., 0] / 2) * (inp_w / width)
tl_y = (topk_ys - wh[..., 1] / 2) * (inp_h / height)
br_x = (topk_xs + wh[..., 0] / 2) * (inp_w / width)
br_y = (topk_ys + wh[..., 1] / 2) * (inp_h / height)
batch_bboxes = torch.stack([tl_x, tl_y, br_x, br_y], dim=2)
batch_bboxes = torch.cat((batch_bboxes, batch_scores[..., None]), dim=-1)
return batch_bboxes, batch_topk_labels
def forward(self, x):
x = self.model.backbone(x)
x = self.model.neck(x)
center_heatmap_pred, wh_pred, offset_pred = self.model.bbox_head(x)
batch_det_bboxes, batch_labels = self._decode_heatmap(center_heatmap_pred[0], wh_pred[0], offset_pred[0], img_shape=(512,512), k=100, kernel=3)
det_bboxes = batch_det_bboxes.view([-1, 5])
bboxes = det_bboxes[..., :4]
scores = det_bboxes[..., 4]
labels = batch_labels.view(-1)
return bboxes, scores, labels
model = CenterNet().eval()
input = torch.zeros(1, 3, 512, 512, device='cpu')
torch.onnx.export(model, input, "centernet.onnx", opset_version=11)
import onnx
from onnxsim import simplify
onnx_model = onnx.load("centernet.onnx") # load onnx model
model_simp, check = simplify(onnx_model)
assert check, "Simplified ONNX model could not be validated"
onnx.save(model_simp, "centernet_sim.onnx")
导出的onnx结构如下:
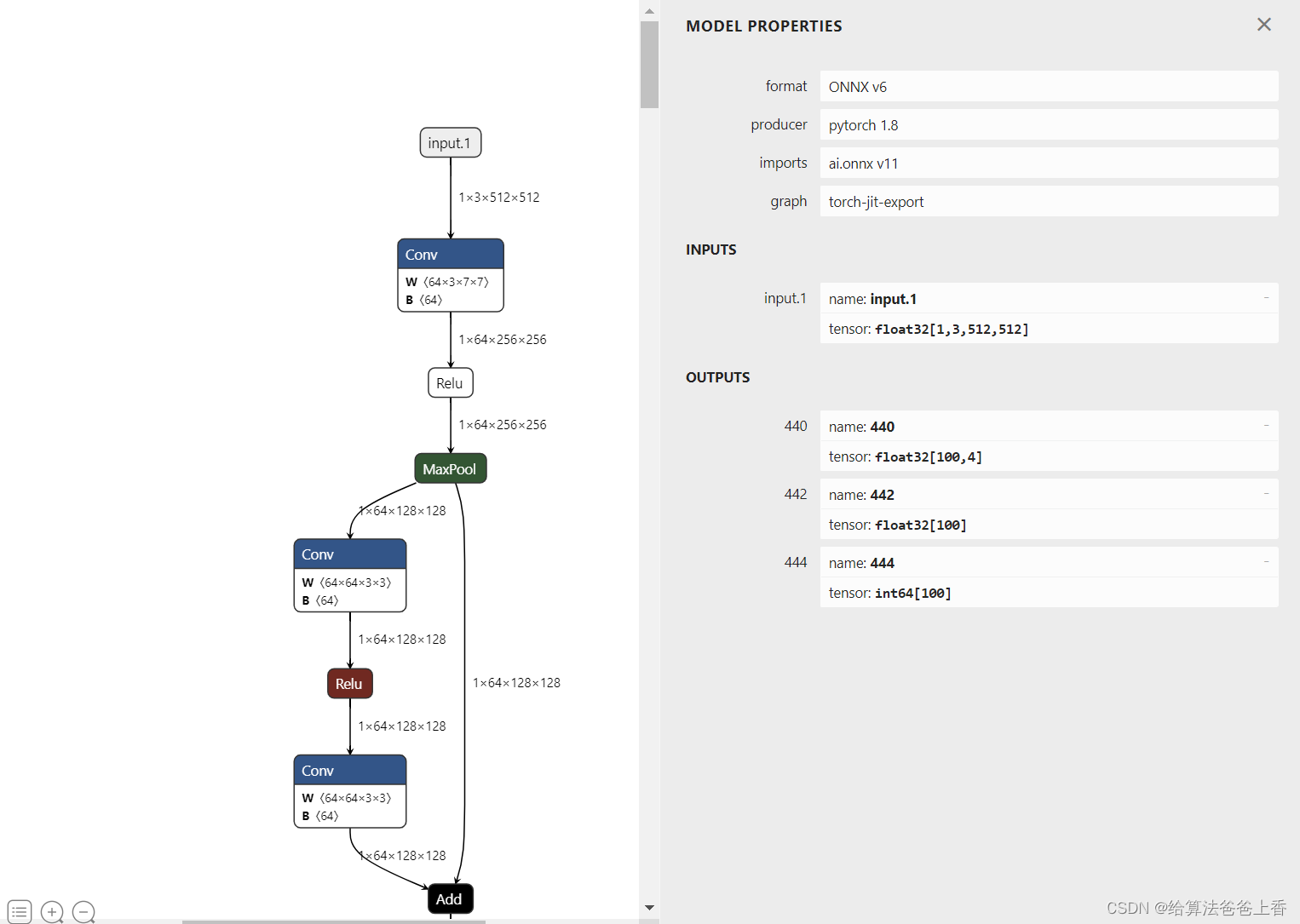
则三个输出分别为boxes、scores、class_ids。
安装mmdeploy的话,可以通过下面脚本导出onnx模型:
from mmdeploy.apis import torch2onnx
from mmdeploy.backend.sdk.export_info import export2SDK
img = 'demo.JPEG'
work_dir = './work_dir/onnx/centernet'
save_file = './end2end.onnx'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_onnxruntime_dynamic.py'
model_cfg = 'mmdetection/configs/centernet/centernet_r18_8xb16-crop512-140e_coco.py'
model_checkpoint = 'checkpoints/centernet_resnet18_140e_coco_20210705_093630-bb5b3bf7.pth'
device = 'cpu'
# 1. convert model to onnx
torch2onnx(img, work_dir, save_file, deploy_cfg, model_cfg, model_checkpoint, device)
# 2. extract pipeline info for sdk use (dump-info)
export2SDK(deploy_cfg, model_cfg, work_dir, pth=model_checkpoint, device=device)
onnx模型的结构如下:
onnxruntime推理
手动导出的onnx模型使用onnxruntime推理:
import cv2
import numpy as np
import onnxruntime
class_names = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] #coco80类别
input_shape = (512, 512)
score_threshold = 0.2
nms_threshold = 0.5
confidence_threshold = 0.2
def nms(boxes, scores, score_threshold, nms_threshold):
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
areas = (y2 - y1 + 1) * (x2 - x1 + 1)
keep = []
index = scores.argsort()[::-1]
while index.size > 0:
i = index[0]
keep.append(i)
x11 = np.maximum(x1[i], x1[index[1:]])
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
w = np.maximum(0, x22 - x11 + 1)
h = np.maximum(0, y22 - y11 + 1)
overlaps = w * h
ious = overlaps / (areas[i] + areas[index[1:]] - overlaps)
idx = np.where(ious <= nms_threshold)[0]
index = index[idx + 1]
return keep
def xywh2xyxy(x):
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2
y[:, 1] = x[:, 1] - x[:, 3] / 2
y[:, 2] = x[:, 0] + x[:, 2] / 2
y[:, 3] = x[:, 1] + x[:, 3] / 2
return y
def filter_box(outputs):
outputs0, outputs1, outputs2 = outputs
flag = outputs1 > confidence_threshold
output0 = outputs0[flag].reshape(-1, 4)
output1 = outputs1[flag].reshape(-1, 1)
outputs2 = outputs2[flag].reshape(-1, 1)
outputs = np.concatenate((output0, output1, outputs2), axis=1)
boxes = []
scores = []
class_ids = []
for i in range(len(outputs)):
outputs[i][4] = output1[i]
outputs[i][5] = outputs2[i]
if outputs[i][4] > score_threshold:
boxes.append(outputs[i][:6])
scores.append(outputs[i][4])
class_ids.append(outputs[i][5])
boxes = np.array(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, score_threshold, nms_threshold)
output = boxes[indices]
return output
def letterbox(im, new_shape=(416, 416), color=(114, 114, 114)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = (new_shape[1] - new_unpad[0])/2, (new_shape[0] - new_unpad[1])/2 # wh padding
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im
def scale_boxes(boxes, shape):
# Rescale boxes (xyxy) from input_shape to shape
gain = min(input_shape[0] / shape[0], input_shape[1] / shape[1]) # gain = old / new
pad = (input_shape[1] - shape[1] * gain) / 2, (input_shape[0] - shape[0] * gain) / 2 # wh padding
boxes[..., [0, 2]] -= pad[0] # x padding
boxes[..., [1, 3]] -= pad[1] # y padding
boxes[..., :4] /= gain
boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
return boxes
def draw(image, box_data):
box_data = scale_boxes(box_data, image.shape)
boxes = box_data[...,:4].astype(np.int32)
scores = box_data[...,4]
classes = box_data[...,5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 1)
cv2.putText(image, '{0} {1:.2f}'.format(class_names[cl], score), (top, left), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1)
if __name__=="__main__":
image = cv2.imread('bus.jpg')
input = letterbox(image, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input[0,:] = (input[0,:] - 123.675) / 58.395
input[1,:] = (input[1,:] - 116.28) / 57.12
input[2,:] = (input[2,:] - 103.53) / 57.375
input = np.expand_dims(input, axis=0)
onnx_session = onnxruntime.InferenceSession('centernet_sim.onnx', providers=['CPUExecutionProvider'])
input_name = []
for node in onnx_session.get_inputs():
input_name.append(node.name)
output_name = []
for node in onnx_session.get_outputs():
output_name.append(node.name)
inputs = {}
for name in input_name:
inputs[name] = input
outputs = onnx_session.run(None, inputs)
boxes = filter_box(outputs)
draw(image, boxes)
cv2.imwrite('result.jpg', image)
mmdeploy导出的onnx模型使用onnxruntime推理:
import cv2
import numpy as np
import onnxruntime
class_names = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] #coco80类别
input_shape = (512, 512)
confidence_threshold = 0.2
def filter_box(outputs): #删除置信度小于confidence_threshold的BOX
flag = outputs[0][..., 4] > confidence_threshold
boxes = outputs[0][flag]
class_ids = outputs[1][flag].reshape(-1, 1)
output = np.concatenate((boxes, class_ids), axis=1)
return output
def letterbox(im, new_shape=(416, 416), color=(114, 114, 114)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = (new_shape[1] - new_unpad[0])/2, (new_shape[0] - new_unpad[1])/2 # wh padding
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im
def scale_boxes(input_shape, boxes, shape):
# Rescale boxes (xyxy) from input_shape to shape
gain = min(input_shape[0] / shape[0], input_shape[1] / shape[1]) # gain = old / new
pad = (input_shape[1] - shape[1] * gain) / 2, (input_shape[0] - shape[0] * gain) / 2 # wh padding
boxes[..., [0, 2]] -= pad[0] # x padding
boxes[..., [1, 3]] -= pad[1] # y padding
boxes[..., :4] /= gain
boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
return boxes
def draw(image, box_data):
box_data = scale_boxes(input_shape, box_data, image.shape)
boxes = box_data[...,:4].astype(np.int32)
scores = box_data[...,4]
classes = box_data[...,5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 1)
cv2.putText(image, '{0} {1:.2f}'.format(class_names[cl], score), (top, left), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1)
if __name__=="__main__":
image = cv2.imread('bus.jpg')
input = letterbox(image, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input[0,:] = (input[0,:] - 123.675) / 58.395
input[1,:] = (input[1,:] - 116.28) / 57.12
input[2,:] = (input[2,:] - 103.53) / 57.375
input = np.expand_dims(input, axis=0)
onnx_session = onnxruntime.InferenceSession('../work_dir/onnx/centernet/end2end.onnx', providers=['CPUExecutionProvider'])
input_name = []
for node in onnx_session.get_inputs():
input_name.append(node.name)
output_name=[]
for node in onnx_session.get_outputs():
output_name.append(node.name)
inputs = {}
for name in input_name:
inputs[name] = input
outputs = onnx_session.run(None, inputs)
boxes = filter_box(outputs)
draw(image, boxes)
cv2.imwrite('result.jpg', image)
直接使用mmdeploy的api推理:
from mmdeploy.apis import inference_model
model_cfg = 'mmdetection/configs/centernet/centernet_r18_8xb16-crop512-140e_coco.py'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_onnxruntime_dynamic.py'
img = 'mmdetection/demo/demo.jpg'
backend_files = ['work_dir/onnx/centernet/end2end.onnx']
device = 'cpu'
result = inference_model(model_cfg, deploy_cfg, backend_files, img, device)
print(result)
或者
from mmdeploy_runtime import Detector
import cv2
# 读取图片
img = cv2.imread('mmdetection/demo/demo.jpg')
# 创建检测器
detector = Detector(model_path='work_dir/onnx/centernet', device_name='cpu')
# 执行推理
bboxes, labels, _ = detector(img)
# 使用阈值过滤推理结果,并绘制到原图中
indices = [i for i in range(len(bboxes))]
for index, bbox, label_id in zip(indices, bboxes, labels):
[left, top, right, bottom], score = bbox[0:4].astype(int), bbox[4]
if score < 0.3:
continue
cv2.rectangle(img, (left, top), (right, bottom), (0, 255, 0))
cv2.imwrite('output_detection.png', img)
导出engine文件
方法一:通过trtexec转换onnx文件,LZ的版本是TensorRT-8.2.1.8。
./trtexec.exe --onnx=centernet.onnx --saveEngine=centernet.engine --workspace=20480
方法二:通过mmdeploy导出engine文件。
from mmdeploy.apis import torch2onnx
from mmdeploy.backend.tensorrt.onnx2tensorrt import onnx2tensorrt
from mmdeploy.backend.sdk.export_info import export2SDK
import os
img = 'demo.JPEG'
work_dir = './work_dir/trt/centernet'
save_file = './end2end.onnx'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_tensorrt_dynamic-320x320-1344x1344.py'
model_cfg = 'mmdetection/configs/centernet/centernet_r18_8xb16-crop512-140e_coco.py'
model_checkpoint = 'checkpoints/centernet_resnet18_140e_coco_20210705_093630-bb5b3bf7.pth'
device = 'cuda'
# 1. convert model to IR(onnx)
torch2onnx(img, work_dir, save_file, deploy_cfg, model_cfg, model_checkpoint, device)
# 2. convert IR to tensorrt
onnx_model = os.path.join(work_dir, save_file)
save_file = 'end2end.engine'
model_id = 0
device = 'cuda'
onnx2tensorrt(work_dir, save_file, model_id, deploy_cfg, onnx_model, device)
# 3. extract pipeline info for sdk use (dump-info)
export2SDK(deploy_cfg, model_cfg, work_dir, pth=model_checkpoint, device=device)
tensorrt推理
trtexec导出的模型使用tensorrt推理:
import cv2
import numpy as np
import tensorrt as trt
import pycuda.autoinit
import pycuda.driver as cuda
class_names = ['person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
'hair drier', 'toothbrush'] #coco80类别
input_shape = (512, 512)
score_threshold = 0.2
nms_threshold = 0.5
confidence_threshold = 0.2
def nms(boxes, scores, score_threshold, nms_threshold):
x1 = boxes[:, 0]
y1 = boxes[:, 1]
x2 = boxes[:, 2]
y2 = boxes[:, 3]
areas = (y2 - y1 + 1) * (x2 - x1 + 1)
keep = []
index = scores.argsort()[::-1]
while index.size > 0:
i = index[0]
keep.append(i)
x11 = np.maximum(x1[i], x1[index[1:]])
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
w = np.maximum(0, x22 - x11 + 1)
h = np.maximum(0, y22 - y11 + 1)
overlaps = w * h
ious = overlaps / (areas[i] + areas[index[1:]] - overlaps)
idx = np.where(ious <= nms_threshold)[0]
index = index[idx + 1]
return keep
def xywh2xyxy(x):
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2
y[:, 1] = x[:, 1] - x[:, 3] / 2
y[:, 2] = x[:, 0] + x[:, 2] / 2
y[:, 3] = x[:, 1] + x[:, 3] / 2
return y
def filter_box(outputs):
outputs0, outputs1, outputs2 = outputs
flag = outputs1 > confidence_threshold
output0 = outputs0[flag].reshape(-1, 4)
output1 = outputs1[flag].reshape(-1, 1)
outputs2 = outputs2[flag].reshape(-1, 1)
outputs = np.concatenate((output0, output1, outputs2), axis=1)
boxes = []
scores = []
class_ids = []
for i in range(len(outputs)):
outputs[i][4] = output1[i]
outputs[i][5] = outputs2[i]
if outputs[i][4] > score_threshold:
boxes.append(outputs[i][:6])
scores.append(outputs[i][4])
class_ids.append(outputs[i][5])
boxes = np.array(boxes)
scores = np.array(scores)
indices = nms(boxes, scores, score_threshold, nms_threshold)
output = boxes[indices]
return output
def letterbox(im, new_shape=(416, 416), color=(114, 114, 114)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = (new_shape[1] - new_unpad[0])/2, (new_shape[0] - new_unpad[1])/2 # wh padding
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im
def scale_boxes(boxes, shape):
# Rescale boxes (xyxy) from input_shape to shape
gain = min(input_shape[0] / shape[0], input_shape[1] / shape[1]) # gain = old / new
pad = (input_shape[1] - shape[1] * gain) / 2, (input_shape[0] - shape[0] * gain) / 2 # wh padding
boxes[..., [0, 2]] -= pad[0] # x padding
boxes[..., [1, 3]] -= pad[1] # y padding
boxes[..., :4] /= gain
boxes[..., [0, 2]] = boxes[..., [0, 2]].clip(0, shape[1]) # x1, x2
boxes[..., [1, 3]] = boxes[..., [1, 3]].clip(0, shape[0]) # y1, y2
return boxes
def draw(image, box_data):
box_data = scale_boxes(box_data, image.shape)
boxes = box_data[...,:4].astype(np.int32)
scores = box_data[...,4]
classes = box_data[...,5].astype(np.int32)
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 1)
cv2.putText(image, '{0} {1:.2f}'.format(class_names[cl], score), (top, left), cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 0, 255), 1)
if __name__=="__main__":
logger = trt.Logger(trt.Logger.WARNING)
with open("centernet.engine", "rb") as f, trt.Runtime(logger) as runtime:
engine = runtime.deserialize_cuda_engine(f.read())
context = engine.create_execution_context()
h_input = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(0)), dtype=np.float32)
h_output0 = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(1)), dtype=np.float32)
h_output1 = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(2)), dtype=np.float32)
h_output2 = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(3)), dtype=np.float32)
d_input = cuda.mem_alloc(h_input.nbytes)
d_output0 = cuda.mem_alloc(h_output0.nbytes)
d_output1 = cuda.mem_alloc(h_output1.nbytes)
d_output2 = cuda.mem_alloc(h_output2.nbytes)
stream = cuda.Stream()
image = cv2.imread('bus.jpg')
input = letterbox(image, input_shape)
input = input[:, :, ::-1].transpose(2, 0, 1).astype(dtype=np.float32) #BGR2RGB和HWC2CHW
input[0,:] = (input[0,:] - 123.675) / 58.395
input[1,:] = (input[1,:] - 116.28) / 57.12
input[2,:] = (input[2,:] - 103.53) / 57.375
input = np.expand_dims(input, axis=0)
np.copyto(h_input, input.ravel())
with engine.create_execution_context() as context:
cuda.memcpy_htod_async(d_input, h_input, stream)
context.execute_async_v2(bindings=[int(d_input), int(d_output0), int(d_output1), int(d_output2)], stream_handle=stream.handle)
cuda.memcpy_dtoh_async(h_output0, d_output0, stream)
cuda.memcpy_dtoh_async(h_output1, d_output1, stream)
cuda.memcpy_dtoh_async(h_output2, d_output2, stream)
stream.synchronize()
h_output = []
h_output.append(h_output0.reshape(100, 4))
h_output.append(h_output1.reshape(100))
h_output.append(h_output2.reshape(100, 1).astype(np.int32))
boxes = filter_box(h_output)
draw(image, boxes)
cv2.imwrite('result.jpg', image)
使用mmdeploy的api推理:
from mmdeploy.apis import inference_model
model_cfg = 'mmdetection/configs/centernet/centernet_r18_8xb16-crop512-140e_coco.py'
deploy_cfg = 'mmdeploy/configs/mmdet/detection/detection_tensorrt_dynamic-300x300-512x512.py'
img = 'mmdetection/demo/demo.jpg'
backend_files = ['work_dir/trt/centernet/end2end.engine']
device = 'cuda'
result = inference_model(model_cfg, deploy_cfg, backend_files, img, device)
print(result)
或者
from mmdeploy_runtime import Detector
import cv2
# 读取图片
img = cv2.imread('mmdetection/demo/demo.jpg')
# 创建检测器
detector = Detector(model_path='work_dir/trt/centernet', device_name='cuda')
# 执行推理
bboxes, labels, _ = detector(img)
# 使用阈值过滤推理结果,并绘制到原图中
indices = [i for i in range(len(bboxes))]
for index, bbox, label_id in zip(indices, bboxes, labels):
[left, top, right, bottom], score = bbox[0:4].astype(int), bbox[4]
if score < 0.3:
continue
cv2.rectangle(img, (left, top), (right, bottom), (0, 255, 0))
cv2.imwrite('output_detection.png', img)
文章来源:https://blog.csdn.net/taifyang/article/details/134765968
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!