如何入门yolo目标检测?
学习目标
知道yolo网络架构,理解其输入输出
知道yolo模型的训练样本构建的方法
理解yolo模型的损失函数
YOLO系列算法是一类典型的one-stage目标检测算法,其利用anchor box将分类与目标定位的回归问题结合起来,从而做到了高效、灵活和泛化性能好,所以在工业界也十分受欢迎,接下来我们介绍YOLO 系列算法。
1.yolo算法
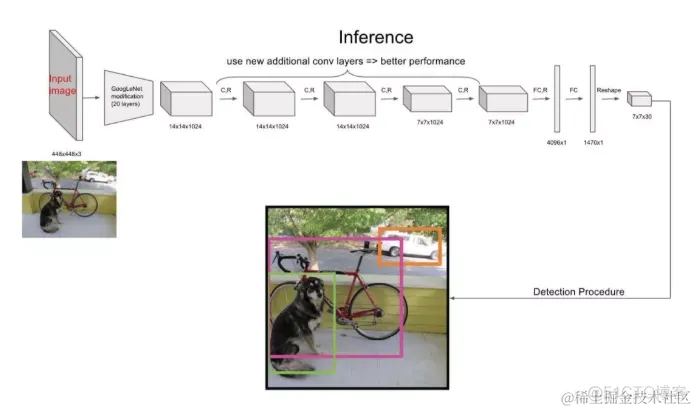
Yolo算法采用一个单独的CNN模型实现end-to-end的目标检测,核心思想就是利用整张图作为网络的输入,直接在输出层回归 bounding box(边界框) 的位置及其所属的类别,整个系统如下图所示:
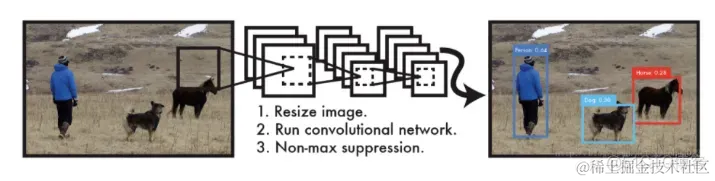
首先将输入图片resize到448x448,然后送入CNN网络,最后处理网络预测结果得到检测的目标。相比R-CNN算法,其是一个统一的框架,其速度更快。
1.1 Yolo算法思想
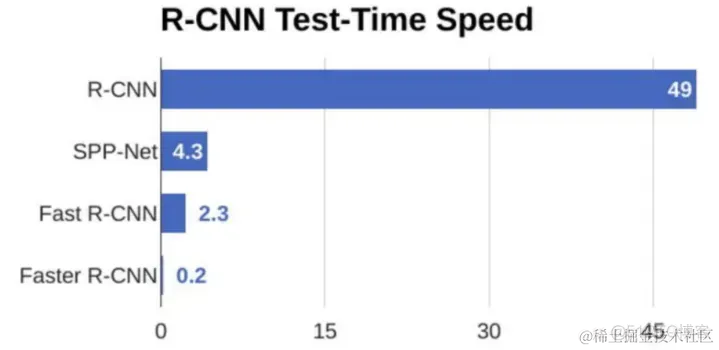
在介绍Yolo算法之前,我们回忆下RCNN模型,RCNN模型提出了候选区(Region Proposals)的方法,先从图片中搜索出一些可能存在对象的候选区(Selective Search),大概2000个左右,然后对每个候选区进行对象识别,但处理速度较慢。
Yolo意思是You Only Look Once,它并没有真正的去掉候选区域,而是创造性的将候选区和目标分类合二为一,看一眼图片就能知道有哪些对象以及它们的位置。
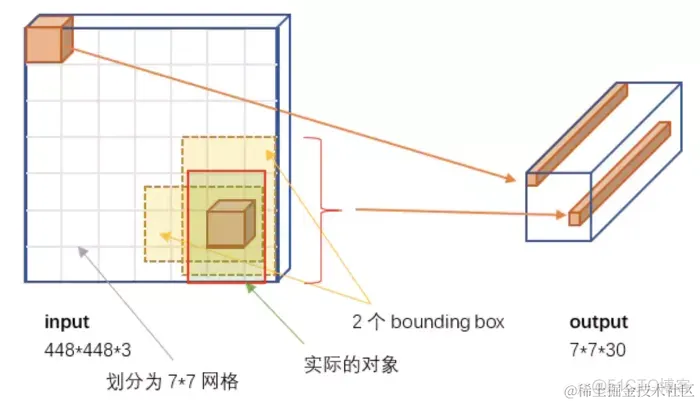
Yolo模型采用预定义预测区域的方法来完成目标检测,具体而言是将原始图像划分为 7x7=49 个网格(grid),每个网格允许预测出2个边框(bounding box,包含某个对象的矩形框),总共 49x2=98 个bounding box。我们将其理解为98个预测区,很粗略的覆盖了图片的整个区域,就在这98个预测区中进行目标检测。
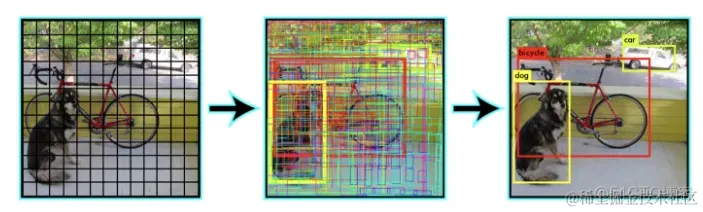
只要得到这98个区域的目标分类和回归结果,再进行NMS就可以得到最终的目标检测结果。那具体要怎样实现呢?
1.2 Yolo的网络结构
YOLO的结构非常简单,就是单纯的卷积、池化最后加了两层全连接,从网络结构上看,与前面介绍的CNN分类网络没有本质的区别,最大的差异是输出层用线性函数做激活函数,因为需要预测bounding box的位置(数值型),而不仅仅是对象的概率。所以粗略来说,YOLO的整个结构就是输入图片经过神经网络的变换得到一个输出的张量,如下图所示:
网络结构比较简单,重点是我们要理解网络输入与输出之间的关系。
1.2.1 网络输入
网络的输入是原始图像,唯一的要求是缩放到448x448的大小。主要是因为Yolo的网络中,卷积层最后接了两个全连接层,全连接层是要求固定大小的向量作为输入,所以Yolo的输入图像的大小固定为448x448。
1.2.2 网络输出
网络的输出就是一个7x7x30 的张量(tensor)。那这个输出结果我们要怎么理解那?
1.7X7网格
根据YOLO的设计,输入图像被划分为 7x7 的网格(grid),输出张量中的 7x7 就对应着输入图像的 7x7 网格。或者我们把 7x7x30 的张量看作 7x7=49个30维的向量,也就是输入图像中的每个网格对应输出一个30维的向量。如下图所示,比如输入图像左上角的网格对应到输出张量中左上角的向量。
2.30维向量
30维的向量包含:2个bbox的位置和置信度以及该网格属于20个类别的概率
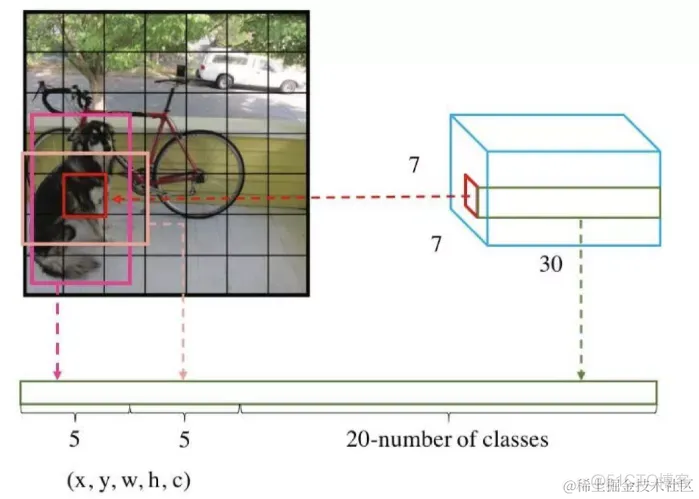
2个bounding box的位置 每个bounding box需要4个数值来表示其位置,(Center_x,Center_y,width,height),即(bounding box的中心点的x坐标,y坐标,bounding box的宽度,高度),2个bounding box共需要8个数值来表示其位置。
2个bounding box的置信度 bounding box的置信度 = 该bounding box内存在对象的概率 * 该bounding box与该对象实际bounding box的IOU,用公式表示就是:

Pr(Object)是bounding box内存在对象的概率
20个对象分类的概率
Yolo支持识别20种不同的对象(人、鸟、猫、汽车、椅子等),所以这里有20个值表示该网格位置存在任一种对象的概率.
1.3Yolo模型的训练
在进行模型训练时,我们需要构造训练样本和设计损失函数,才能利用梯度下降对网络进行训练。
1.3.1训练样本的构建
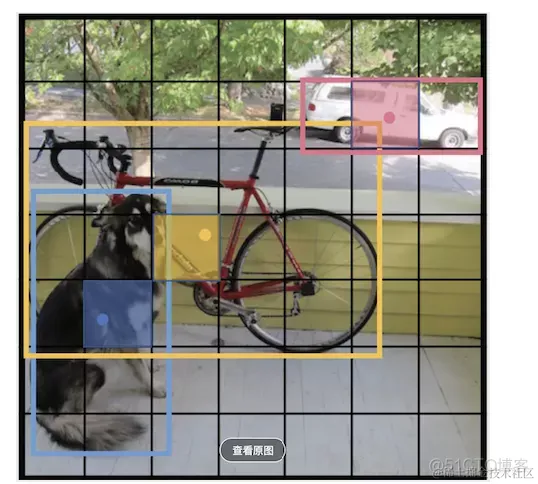
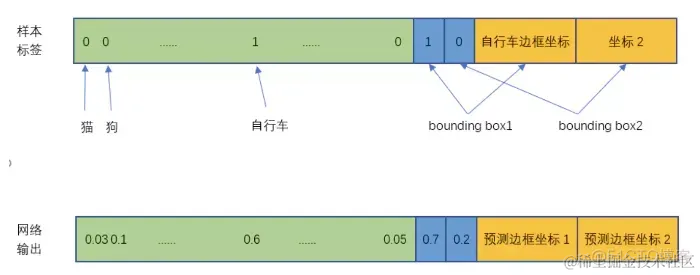
将一幅图片输入到yolo模型中,对应的输出是一个7x7x30张量,构建标签label时对于原图像中的每一个网格grid都需要构建一个30维的向量。对照下图我们来构建目标向量:
20个对象分类的概率
对于输入图像中的每个对象,先找到其中心点。比如上图中自行车,其中心点在黄色圆点位置,中心点落在黄色网格内,所以这个黄色网格对应的30维向量中,自行车的概率是1,其它对象的概率是0。所有其它48个网格的30维向量中,该自行车的概率都是0。这就是所谓的"中心点所在的网格对预测该对象负责"。狗和汽车的分类概率也是同样的方法填写
2个bounding box的位置
训练样本的bbox位置应该填写对象真实的位置bbox,但一个对象对应了2个bounding box,该填哪一个呢?需要根据网络输出的bbox与对象实际bbox的IOU来选择,所以要在训练过程中动态决定到底填哪一个bbox。
2个bounding box的置信度
预测置信度的公式为:

IOU_{pred}^{truth}利用网络输出的2个bounding box与对象真实bounding box计算出来。然后看这2个bounding box的IOU,哪个比较大,就由哪个bounding box来负责预测该对象是否存在,即该bounding box的Pr(Object)=1,同时对象真实bounding box的位置也就填入该bounding box。另一个不负责预测的bounding box的Pr(Object)=0。
上图中自行车所在的grid对应的结果如下图所示:

1.3.2 损失函数
损失就是网络实际输出值与样本标签值之间的偏差:
yolo给出的损失函数:
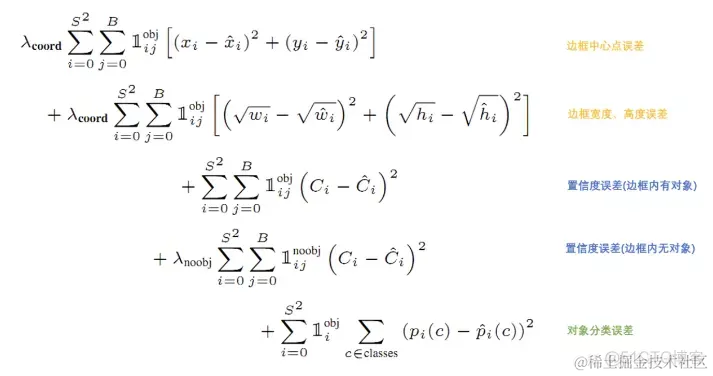
注:其中1_{i}{obj}表示目标是否出现在网格单元i中,1_{ij}{obj}表示单元格i中的第j个边界框预测器负责该预测,YOLO设置 \lambda_{coord} = 5 来调高位置误差的权重, \lambda_{noobj} = 0.5 即调低不存在对象的bounding box的置信度误差的权重。
1.3.3 模型训练
Yolo先使用ImageNet数据集对前20层卷积网络进行预训练,然后使用完整的网络,在PASCAL VOC数据集上进行对象识别和定位的训练。
Yolo的最后一层采用线性激活函数,其它层都是Leaky ReLU。训练中采用了drop out和数据增强(data augmentation)来防止过拟合.
1.4 模型预测
将图片resize成448x448的大小,送入到yolo网络中,输出一个 7x7x30 的张量(tensor)来表示图片中所有网格包含的对象(概率)以及该对象可能的2个位置(bounding box)和可信程度(置信度)。在采用NMS(Non-maximal suppression,非极大值抑制)算法选出最有可能是目标的结果。
1.5 yolo总结
优点
速度非常快,处理速度可以达到45fps,其快速版本(网络较小)甚至可以达到155fps。
训练和预测可以端到端的进行,非常简便。
缺点
准确率会打折扣
对于小目标和靠的很近的目标检测效果并不好
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!