【数据结构】最短路径算法实现(Dijkstra(迪克斯特拉),FloydWarshall(弗洛伊德) )
前言
最短路径问题:从在带权有向图G中的某一顶点出发,找出一条通往另一顶点的最短路径,最短也就是沿路径各边的权值总和达到最小。
单源最短路径问题:给定一个图G = ( V , E ) G=(V,E)G=(V,E),求源结点s ∈ V s∈Vs∈V到图
中每个结点v ∈ V v∈Vv∈V的最短路径
一、Dijkstra(迪克斯特拉)
1.方法:
针对一个带权有向图G,将所有结点分为两组S和Q,S是已经确定最短路径的结点集合,在初始时
为空(初始时就可以将源节点s放入,毕竟源节点到自己的代价是0),Q 为其余未确定最短路径
的结点集合,每次从Q 中找出一个起点到该结点代价最小的结点u ,将u 从Q 中移出,并放入S
中,对u 的每一个相邻结点v 进行松弛操作。松弛即对每一个相邻结点v ,判断源节点s到结点u
的代价与u 到v 的代价之和是否比原来s 到v 的代价更小,若代价比原来小则要将s 到v 的代价更新
为s 到u 与u 到v 的代价之和,否则维持原样。如此一直循环直至集合Q 为空,即所有节点都已经
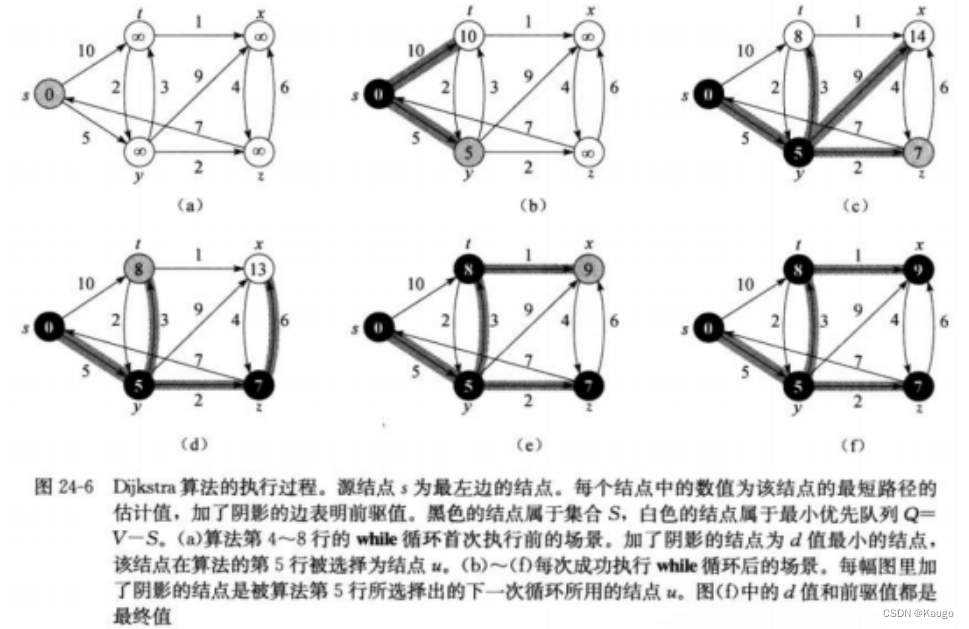
查找过一遍并确定了最短路径, Dijkstra算法每次都是选择V-S中最小的路径节点来进行更新,并加入S中,所以该算法使用的是贪心策略。
核心就是从当前选入的顶点当中去找其直接相连的最小的边,然后用这个最小边相连的另一个顶点为起点,找与其直接相连边中最小的边(eg:与s直接相连的为t,y。最小的边为5,即y顶点,其为s到y的最短距离,然后以y为起点,与y直接相连的有t,x,z。最小的边为2即z点,y到z最短为2,所以s到z最短为7,以此类推,直到所有点都被当过起点后结束)
2.代码实现
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{
//dist存的src到其他点的最短路径
// vector<int> pPath 记录srci-其他顶点最短路径父顶点数组
size_t srci = GetVertexIndex(src);
size_t n = _vertexs.size();
dist.resize(n, MAX_W);
pPath.resize(n, -1);
dist[srci] = 0;//自己到自己距离为0
pPath[srci] = srci;
// 已经确定最短路径的顶点集合
vector<bool> S(n, false);
for (size_t j = 0; j < n; ++j)
{
int u = srci;//u为当前最短路径顶点
W min = MAX_W;//min为起始点到u的距离
for (size_t i = 0; i < n; ++i)
{
if (S[i] == false && dist[i] < min)
{
u = i;
min = dist[i];
}
}
//找到与当前起始点直接相连的最短路径的顶点后
//将其位置置为true表明已经选入
S[u] = true;
// 松弛算法:更新一遍u连接的所有边,看是否能更新出更短连接路径
for (size_t v = 0; v < n; ++v)
{
// 如果srci->u + u->k 比 srci->k更短 则进行更新
if (S[v] == false && _matrix[u][v] != MAX_W
&& dist[u] + _matrix[u][v] < dist[v])
{
dist[v] = dist[u] + _matrix[u][v];
pPath[v] = u;
}
}
}
}
//打印路径
void PrintShortPath(const V& src, const vector<W>& dist, const vector<int>& pPath) {
size_t srci = GetVertexIndex(src);
size_t n = _vertexs.size();
for (size_t i = 0; i < n; i++) {
if (i != srci) {
vector<int>path;
//path为src到其他顶点路径
size_t parenti = i;
while (parenti != srci) {
path.push_back(parenti);
parenti = pPath[parenti];
}
path.push_back(srci);
//需要反转一下,因为我们从s->x->v
//是从v的父亲为x再推出x的父亲为s才结束的
reverse(path.begin(), path.end());
for (auto index : path) {
cout << _vertexs[index] << "->";
}
cout << "权值和:" << dist[i] << endl;
}
}
}
Dijkstra算法存在的问题是不支持图中带负权路径,如果带有负权路径,则可能会找不到一些路
径的最短路径。
二、FloydWarshall(弗洛伊德)
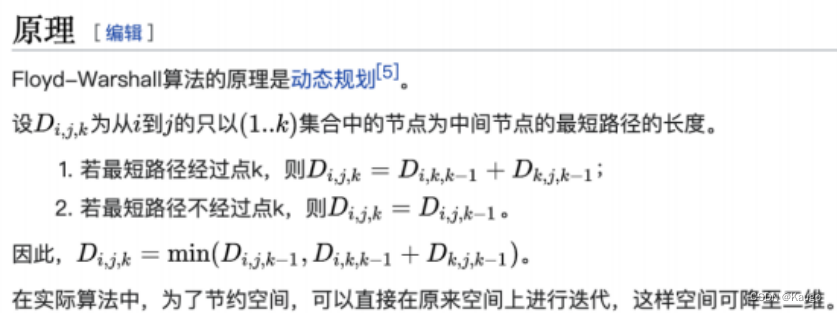
多源最短路径:Floyd-Warshall算法是解决任意两点间的最短路径的一种算法。
1.方法
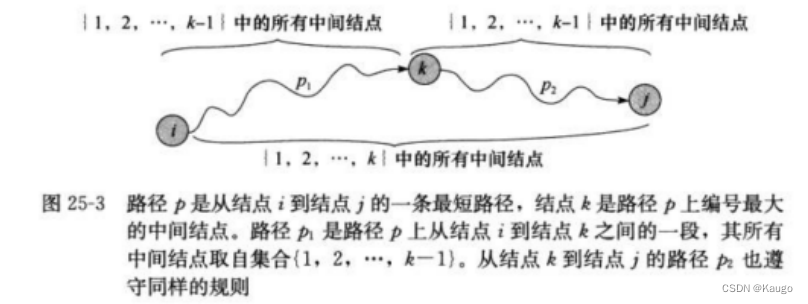
Floyd算法考虑的是一条最短路径的中间节点,即简单路径p={v1,v2,…,vn}上除v1和vn的任意节
点。
设k是p的一个中间节点,那么从i到j的最短路径p就被分成i到k和k到j的两段最短路径p1,p2。p1
是从i到k且中间节点属于{1,2,…,k-1}取得的一条最短路径。p2是从k到j且中间节点属于{1,
2,…,k-1}取得的一条最短路径。
核心将中间经过的k当成所经过s->…->j中间经过的所有中间顶点集合中的一个,把中间的所有顶点看成k。
2.代码实现
void FloydWarshall(vector<vector<W>>& vvDist, vector<vector<int>>& vvpPath)
{
size_t n = _vertexs.size();
vvDist.resize(n);
vvpPath.resize(n);
// 初始化权值和路径矩阵
for (size_t i = 0; i < n; ++i)
{
vvDist[i].resize(n, MAX_W);
vvpPath[i].resize(n, -1);
}
//vvpPath[i][j]表示i->j,j的父亲为i
// 直接相连的边更新一下
//把目前已知直接相连的边放入vvDist中,并更新vvpPath[i][j]
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (_matrix[i][j] != MAX_W)
{
vvDist[i][j] = _matrix[i][j];
vvpPath[i][j] = i;
}
if (i == j)
{
vvDist[i][j] = W();
}
}
}
// 最短路径的更新i-> {其他顶点} ->j
//这里要进行k次的原因是因为我们所有结点都有可能
//成为src与dst的中间结点,所以要考虑所有情况
for (size_t k = 0; k < n; ++k)
{
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// k 作为的中间点尝试去更新i->j的路径
if (vvDist[i][k] != MAX_W && vvDist[k][j] != MAX_W
&& vvDist[i][k] + vvDist[k][j] < vvDist[i][j])
{
vvDist[i][j] = vvDist[i][k] + vvDist[k][j];
vvpPath[i][j] = vvpPath[k][j];
//因为这里k实际上是中间顶点集合
// 找跟j相连的上一个邻接顶点
// 如果k->j 直接相连,上一个点就k,vvpPath[k][j]存就是k
// 如果k->j 没有直接相连,k->...->x->j,vvpPath[k][j]存就是x
}
}
}
// 打印权值和路径矩阵观察数据
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (vvDist[i][j] == MAX_W)
{
//cout << "*" << " ";
printf("%3c", '*');
}
else
{
//cout << vvDist[i][j] << " ";
printf("%3d", vvDist[i][j]);
}
}
cout << endl;
}
cout << endl;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
//cout << vvParentPath[i][j] << " ";
printf("%3d", vvpPath[i][j]);
}
cout << endl;
}
cout << "=================================" << endl;
}
}
};
完整源码
如果对Graph这些代码不太熟悉的小伙伴可以参考我之前写的【数据结构】图的创建(邻接矩阵,邻接表)以及深度广度遍历(BFS,DFS)
namespace matrix {
//V为顶点类型,W为边权值类型,MAX_W为权值最大值也就是无效值
//Direction用来判断是不是有向图,false为无向图
template<class V,class W,W MAX_W=INT_MAX,bool Direction=false>
class Graph {
public:
Graph() = default;
Graph(const V* a, size_t n) {
_vertexs.reserve(n);
for (size_t i = 0; i < n; i++) {
_vertexs.push_back(a[i]);
_indexMap[a[i]] = i;
//将顶点存入_vertexs,下标映射存进map
}
_matrix.resize(n);
for (size_t i = 0; i < _matrix.size(); i++) {
_matrix[i].resize(n, MAX_W);
//邻接矩阵默认初始值为无效值
}
}
size_t GetVertexIndex(const V& v) {
//获得对应顶点在数组中的下标
auto it = _indexMap.find(v);
if (it != _indexMap.end()) {
return it->second;
//有这个顶点返回其下标
}
else {
throw("顶点不存在");
return -1;
}
}
void _AddEdge(size_t srci, size_t dsti, const W& w) {
//存入权值
_matrix[srci][dsti] = w;
if (Direction == false) {
_matrix[dsti][srci] = w;
//无向图要两个方向都存
}
}
void AddEdge(const V& src, const V& dst, const W& w) {
//添加边与顶点的关系。从src到dst方向的关系
size_t srci = GetVertexIndex(src);
size_t dsti = GetVertexIndex(dst);
//先获取其对应的下标
_AddEdge(srci, dsti, w);
}
void Print() {
for (size_t i = 0; i < _vertexs.size(); i++) {
cout << "[" << i << "]" << "->" << _vertexs[i] << endl;
}//打印顶点集
cout << endl;
//打印邻接矩阵
for (size_t i = 0; i < _matrix.size(); i++) {
cout << i << " ";
for (size_t j = 0; j < _matrix[i].size(); j++) {
if (_matrix[i][j] == MAX_W) {
printf("%4c", '*');
}
else {
printf("%4d", _matrix[i][j]);
}
}
cout << endl;
}
}
void BFS(const V& src) {
size_t srci = GetVertexIndex(src);
queue<int>q;
q.push(srci);
vector<bool>visited(_vertexs.size(), false);
visited[srci] = true;//标记这个顶点被访问过了
int levelSize = 1;
while (!q.empty()) {
//levelSize为当前层的大小
for (size_t i = 0; i < levelSize; i++) {
int front = q.front();
q.pop();
cout << front << ":" << _vertexs[front]<<" ";
for (size_t i = 0; i < _vertexs.size(); i++) {
if (_matrix[front][i] != MAX_W && visited[i] == false) {
q.push(i);
visited[i] = true;//标记这个顶点被访问过了
}
}
}
levelSize = q.size();//更新当前层的数量
cout << endl;
}
cout << endl;
}
void _DFS(size_t srci, vector<bool>& visited) {
cout << srci << ":" << _vertexs[srci] << endl;
visited[srci] = true;//标记这个顶点被访问过了
for (size_t i = 0; i < _vertexs.size(); i++) {
if (_matrix[srci][i] != MAX_W && visited[i] == false) {
_DFS(i, visited);
}
}
}
void DFS(const V& src) {
size_t srci = GetVertexIndex(src);
vector<bool>visited(_vertexs.size(), false);
_DFS(srci, visited);
}
typedef Graph<V, W, MAX_W, false> Self;
//建立边的类,保存边的两个顶点下标和权值
struct Edge {
size_t _srci;
size_t _dsti;
W _w;
Edge(size_t srci,size_t dsti,W w)
:_srci(srci),
_dsti(dsti),
_w(w)
{}
bool operator>(const Edge& e)const {
return _w > e._w;//小根堆判断
}
};
W Kruskal(Self& minTree)
{
//minTree为最小生成树,刚开始什么都没有
size_t n = _vertexs.size();
//初始化最小生成树
minTree._vertexs = _vertexs;
minTree._indexMap = _indexMap;
minTree._matrix.resize(n);
for (size_t i = 0; i < n; ++i)
{
minTree._matrix[i].resize(n, MAX_W);
}
//我们每次选边从全部边中选出最小的(保证不构成回路的情况)
//所以我们可以考虑用小根堆来存入边,这样每次方便找最小的
priority_queue<Edge, vector<Edge>, greater<Edge>> minque;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (i < j && _matrix[i][j] != MAX_W)
{
//将所有有效值边放进堆中
minque.push(Edge(i, j, _matrix[i][j]));
}
}
}
int size = 0;
W totalW = W();
UnionFindSet ufs(n);
// 选出n-1条边
while (!minque.empty())
{
//取出最小边
Edge min = minque.top();
minque.pop();
if (!ufs.InSet(min._srci, min._dsti))//判断是否成环
{
//cout << _vertexs[min._srci] << "->" << _vertexs[min._dsti] <<":"<<min._w << endl;
//不成环就将当前边放入最小生成树当中
minTree._AddEdge(min._srci, min._dsti, min._w);
//并把这两个顶点放入同一个并查集集合当中
ufs.Union(min._srci, min._dsti);
++size;
totalW += min._w;//权值总和增加
}
else
{
//cout << "构成环:";
//cout << _vertexs[min._srci] << "->" << _vertexs[min._dsti] << ":" << min._w << endl;
}
}
if (size == n - 1)//边数选够说明最小生成树
//创建成功
{
return totalW;
}
else
{
return W();
}
}
W Prim(Self& minTree, const W& src)
{
size_t srci = GetVertexIndex(src);
size_t n = _vertexs.size();
minTree._vertexs = _vertexs;
minTree._indexMap = _indexMap;
minTree._matrix.resize(n);
for (size_t i = 0; i < n; ++i)
{
minTree._matrix[i].resize(n, MAX_W);
}
vector<bool> X(n, false);
vector<bool> Y(n, true);
X[srci] = true;
Y[srci] = false;
// 从X->Y集合中连接的边里面选出最小的边
priority_queue<Edge, vector<Edge>, greater<Edge>> minq;
// 先把srci连接的边添加到小根堆中
for (size_t i = 0; i < n; ++i)
{
if (_matrix[srci][i] != MAX_W)
{
minq.push(Edge(srci, i, _matrix[srci][i]));
}
}
cout << "Prim开始选边" << endl;
size_t size = 0;//选出边的数量
W totalW = W();//权值之和
while (!minq.empty())
{
Edge min = minq.top();
minq.pop();
// 最小边的目标点也在X集合,则构成环
if (X[min._dsti])
{
//cout << "构成环:";
//cout << _vertexs[min._srci] << "->" << _vertexs[min._dsti] << ":" << min._w << endl;
}
else
{
//从Y中选出顶点
minTree._AddEdge(min._srci, min._dsti, min._w);//加入最小生成树
//cout << _vertexs[min._srci] << "->" << _vertexs[min._dsti] << ":" << min._w << endl;
X[min._dsti] = true;
Y[min._dsti] = false;
++size;
totalW += min._w;
if (size == n - 1)
break;
//把新加入顶点相关的边都放入小根堆中
for (size_t i = 0; i < n; ++i)
{
if (_matrix[min._dsti][i] != MAX_W && Y[i])
{
minq.push(Edge(min._dsti, i, _matrix[min._dsti][i]));
}
}
}
}
if (size == n - 1)
{
return totalW;
}
else
{
return W();
}
}
void PrintShortPath(const V& src, const vector<W>& dist, const vector<int>& pPath) {
size_t srci = GetVertexIndex(src);
size_t n = _vertexs.size();
for (size_t i = 0; i < n; i++) {
if (i != srci) {
vector<int>path;
//path为src到其他顶点路径
size_t parenti = i;
while (parenti != srci) {
path.push_back(parenti);
parenti = pPath[parenti];
}
path.push_back(srci);
//需要反转一下,因为我们从s->x->v
//是从v的父亲为x再推出x的父亲为s才结束的
reverse(path.begin(), path.end());
for (auto index : path) {
cout << _vertexs[index] << "->";
}
cout << "权值和:" << dist[i] << endl;
}
}
}
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{
//dist存的src到其他点的最短路径
// vector<int> pPath 记录srci-其他顶点最短路径父顶点数组
size_t srci = GetVertexIndex(src);
size_t n = _vertexs.size();
dist.resize(n, MAX_W);
pPath.resize(n, -1);
dist[srci] = 0;//自己到自己距离为0
pPath[srci] = srci;
// 已经确定最短路径的顶点集合
vector<bool> S(n, false);
for (size_t j = 0; j < n; ++j)
{
int u = srci;//u为当前最短路径顶点
W min = MAX_W;//min为起始点到u的距离
for (size_t i = 0; i < n; ++i)
{
if (S[i] == false && dist[i] < min)
{
u = i;
min = dist[i];
}
}
//找到与当前起始点直接相连的最短路径的顶点后
//将其位置置为true表明已经选入
S[u] = true;
// 松弛算法:更新一遍u连接的所有边,看是否能更新出更短连接路径
for (size_t v = 0; v < n; ++v)
{
// 如果srci->u + u->k 比 srci->k更短 则进行更新
if (S[v] == false && _matrix[u][v] != MAX_W
&& dist[u] + _matrix[u][v] < dist[v])
{
dist[v] = dist[u] + _matrix[u][v];
pPath[v] = u;
}
}
}
}
void FloydWarshall(vector<vector<W>>& vvDist, vector<vector<int>>& vvpPath)
{
size_t n = _vertexs.size();
vvDist.resize(n);
vvpPath.resize(n);
// 初始化权值和路径矩阵
for (size_t i = 0; i < n; ++i)
{
vvDist[i].resize(n, MAX_W);
vvpPath[i].resize(n, -1);
}
//vvpPath[i][j]表示i->j,j的父亲为i
// 直接相连的边更新一下
//把目前已知直接相连的边放入vvDist中,并更新vvpPath[i][j]
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (_matrix[i][j] != MAX_W)
{
vvDist[i][j] = _matrix[i][j];
vvpPath[i][j] = i;
}
if (i == j)
{
vvDist[i][j] = W();
}
}
}
// 最短路径的更新i-> {其他顶点} ->j
//这里要进行k次的原因是因为我们所有结点都有可能
//成为src与dst的中间结点,所以要考虑所有情况
for (size_t k = 0; k < n; ++k)
{
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// k 作为的中间点尝试去更新i->j的路径
if (vvDist[i][k] != MAX_W && vvDist[k][j] != MAX_W
&& vvDist[i][k] + vvDist[k][j] < vvDist[i][j])
{
vvDist[i][j] = vvDist[i][k] + vvDist[k][j];
vvpPath[i][j] = vvpPath[k][j];
//因为这里k实际上是中间顶点集合
// 找跟j相连的上一个邻接顶点
// 如果k->j 直接相连,上一个点就k,vvpPath[k][j]存就是k
// 如果k->j 没有直接相连,k->...->x->j,vvpPath[k][j]存就是x
}
}
}
// 打印权值和路径矩阵观察数据
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (vvDist[i][j] == MAX_W)
{
//cout << "*" << " ";
printf("%3c", '*');
}
else
{
//cout << vvDist[i][j] << " ";
printf("%3d", vvDist[i][j]);
}
}
cout << endl;
}
cout << endl;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
//cout << vvParentPath[i][j] << " ";
printf("%3d", vvpPath[i][j]);
}
cout << endl;
}
cout << "=================================" << endl;
}
}
private:
vector<V>_vertexs;//顶点集合
map<V, int>_indexMap;//存顶点与数组下标的映射关系
vector<vector<W>>_matrix;//邻接矩阵
};
}
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!