受“博比特虫”启发可实现多模态传感抓取动作的软执行器来了
软执行器可以实现对易碎和不规则形状物体的精细自适应抓取,这在生物和工程系统中至关重要。然而,目前软机器人在抓取的时候往往受制于抓取能力不足和功能限制。

博比特虫捕获猎物
最近研究人员提出了一种受博比特虫启发的多模态传感自适应软抓取器(MSASG),该抓取器通过利用与自生摩擦力传感器(TFS)集成的三浦折纸骨架来实现。
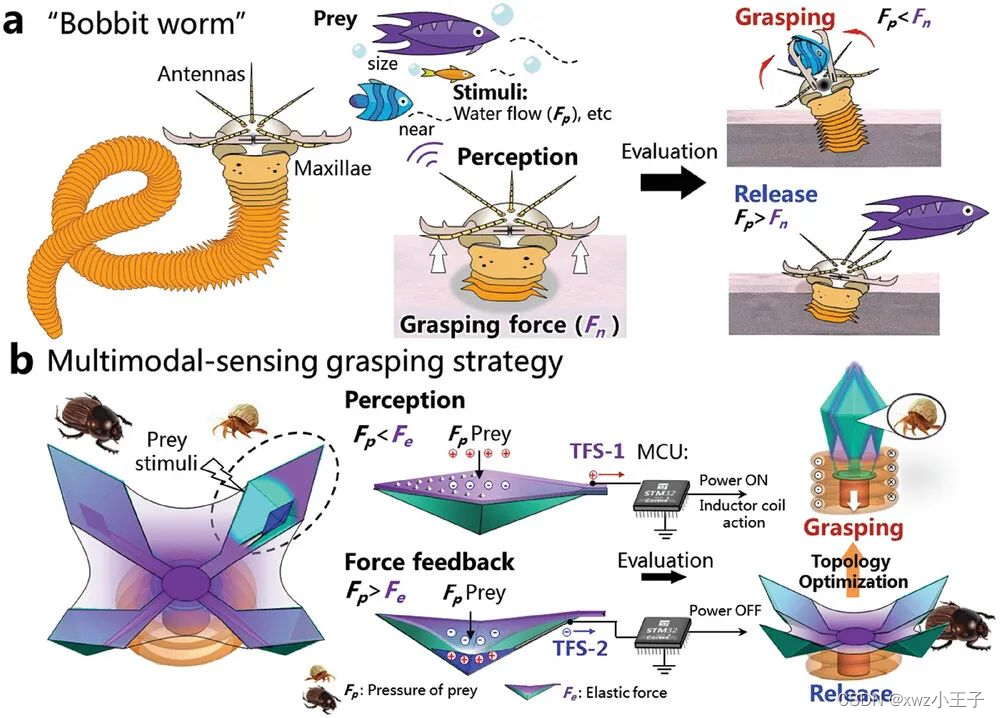
受Bobbit蠕虫启发的多模态传感自适应软抓取器
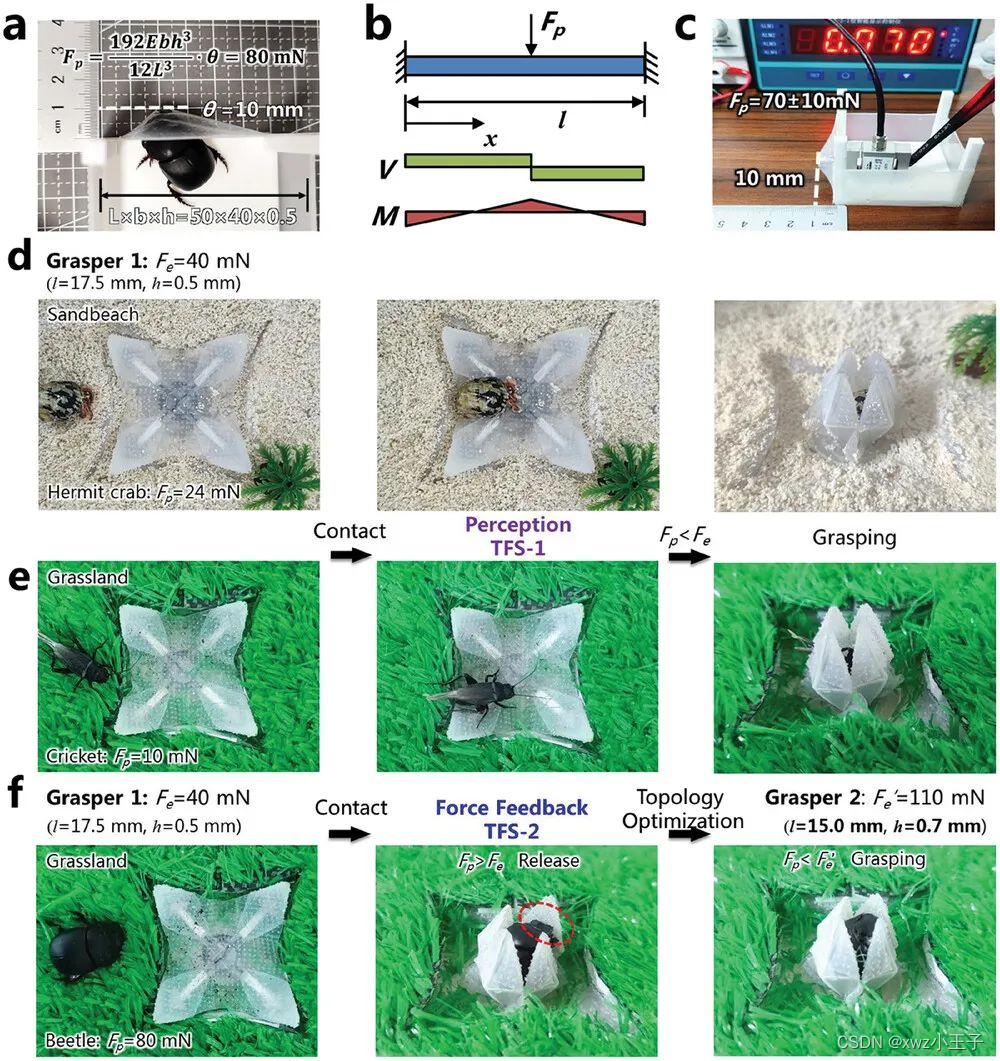
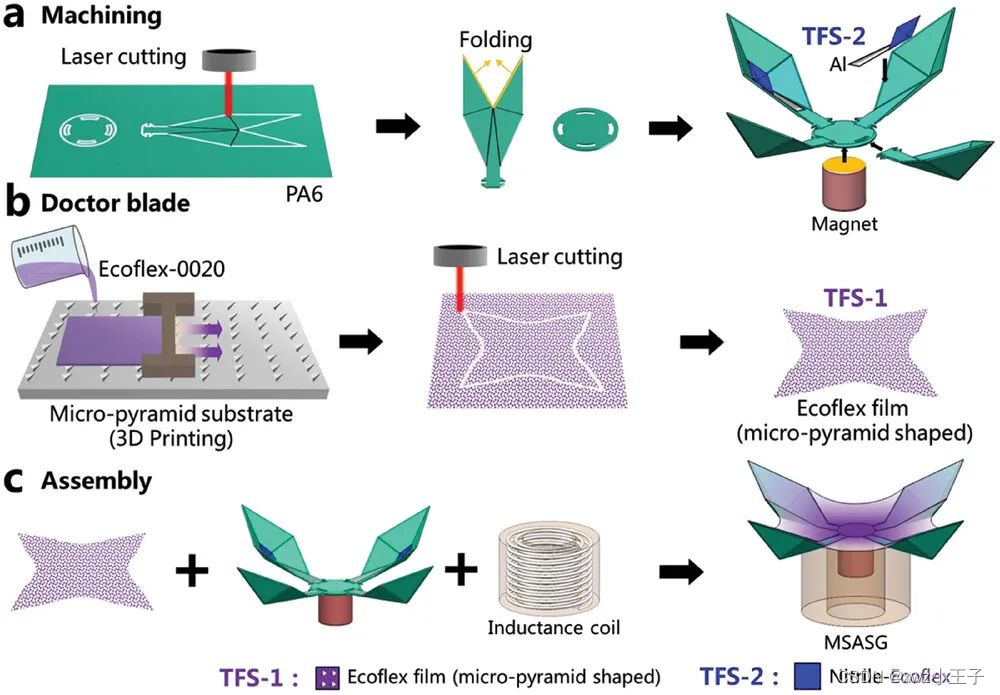
三浦折纸骨架赋予软抓握器强大的抓握力,同时提供一种节能的方式来被动地拥抱物体,无需额外的能量输入。通过在三浦折纸骨架上直接封装金字塔图案弹性薄膜,构建了具有触觉传感(TFS-1)和压力反馈(TFS-2)功能的多模态TFS。MSASG通过评估各种接近的猎物(包括寄居蟹、蟋蟀、甲虫等)的压力来实现快速抓取或释放动作,其灵敏度大于0.18 V mN -1。有限元模拟和实验,可以通过调节拓扑参数(折痕长度和表面膜厚度等)来优化抓取性能和摩擦电传感能力。
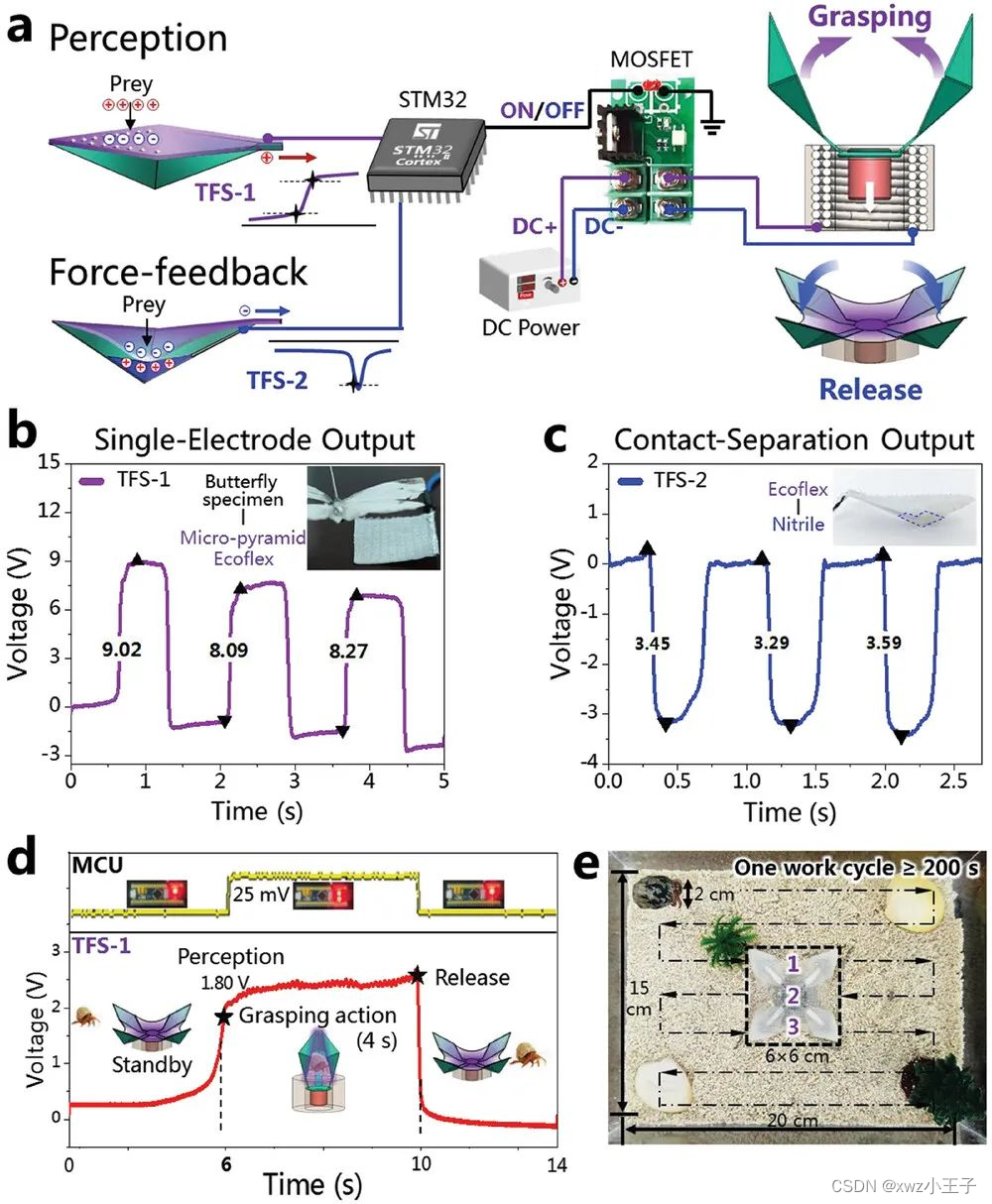
TFS的工作模式
软机器人抓取器要足够的柔软并且又要足够坚硬,以支撑物体的重量。因此,可调刚度材料已成功实现通过主动或被动刚度变化策略来扩展软抓取能力,包括相变材料、磁/电粘合剂和粒子干扰。
研究人员提出了一种基于磁流变弹性体(MRE)技术的硬度可变的抓手皮肤。柔软的 MRE 皮肤可以通过施加磁场可逆地切换到类固体状态,使抓取器能够轻松抓取各种形状的目标物体。
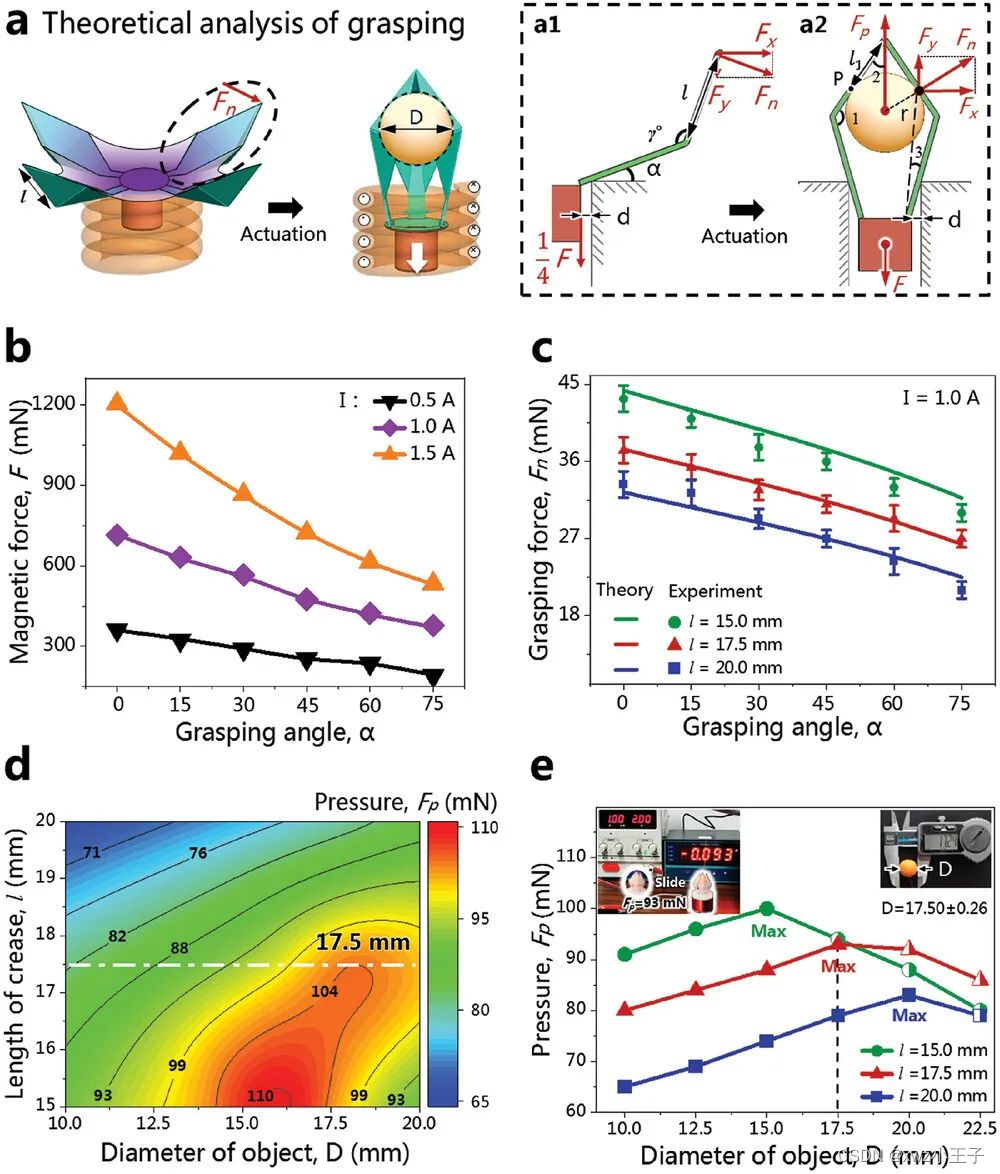
软抓取器抓取性能的理论结果
同时研究人员根据人类手指的构造,提出了软手指中的主动/被动可变刚度机构,以通过双独立变形来调节变形和负载能力。此外,颗粒堵塞是通过在未堵塞、可变形状态和具有类固体刚性的堵塞状态之间切换离散颗粒的状态来实现可变刚度的另一种可行方法。通过巧妙地调整离散梯形粒子之间的接触,设计了具有可编程形状变化和刚度变化的机器人结构。
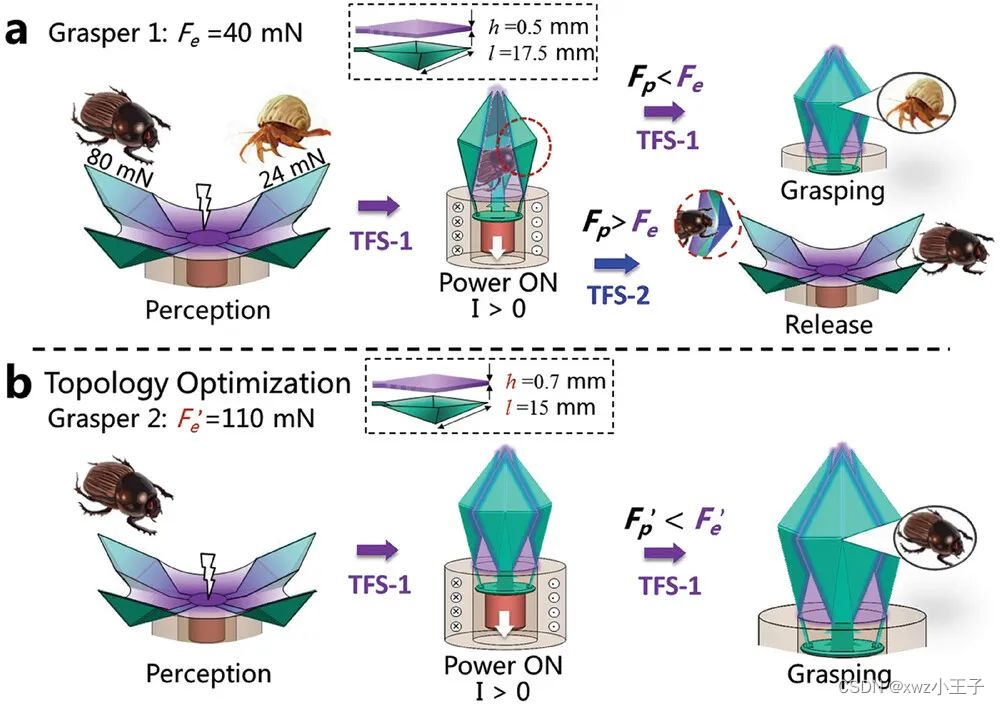
多模态传感抓取性能和拓扑优化
虽然刚度机制通常是通过使用由外部刺激激活的智能材料来实现的,最近对新型软材料的认识极大地促进了这一点,但这些调节策略在兼容性、设计灵活性、材料依赖性、鲁棒性和可扩展性方面存在局限性。
MSASG实验应用演示
另一种策略是几何设计,它可以为工程架构提供一般原则,研究人员开发出了一种具有高速线性运动的全软电磁执行器,并采用气泡铸造方法的连续介质力学来制造和编程整体软执行器。通过应用这一革命性的工艺,不同尺寸的软执行器,甚至是以前不可能的长宽比,都可以通过合理化非平衡流体力学的规则和工具来编程。
此外在软夹具结构方面,研究人员嵌入了由真空驱动的柔性薄膜中的折纸“魔球”。这种灵活的夹具通过以各种几何形状包住全部或部分目标物体,表现出可靠的抓取和操纵能力。为了进一步提高抓握力量,研究人员开发了一种基于水弹折纸机构的气动刚柔耦合夹具,其侧面附有钢板。正如预期的那样,夹具表现出所需的形状适应性和高负载能力。
MSASG 的制备方案
研究人员表示,基于折纸的抓取器可以提供强大的抓取性能,并为扩大软抓取和操纵的范围提供创造性机会,例如机械臂、人造肌肉和超材料的。软抓取器的仿生设计拓宽了多功能人机环境交互场景的未来应用,例如自适应机器人、可重构架构、医疗设备和深海探索。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!