MATLAB - 读取双摆上的 IMU 数据
系列文章目录
前言
本示例展示了如何从安装在双摆杆上的两个 IMU 传感器生成惯性测量单元 (IMU) 读数。双摆使用 Simscape Multibody? 进行建模。有关使用 Simscape Multibody? 构建简易摆的分步示例,请参阅简易摆建模(Simscape Multibody)。
open_system("doublePendulumIMU.slx");?
一、模型
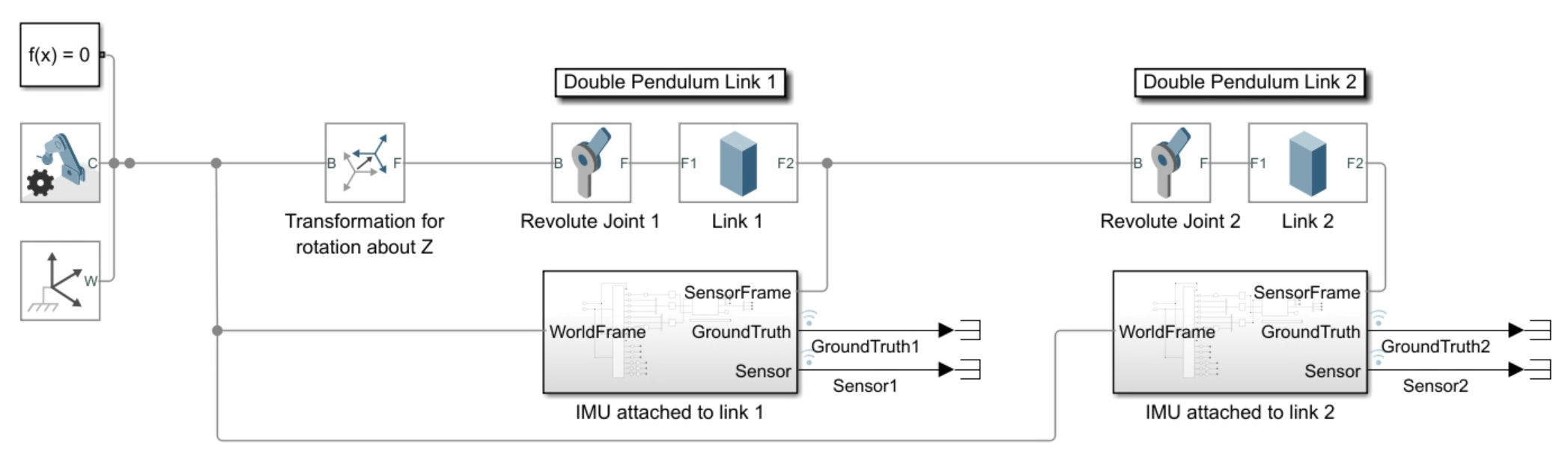
Simscape Multibody? 中的惯性参考框架(或世界框架)默认为右手笛卡尔坐标框架。旋进式关节仅可围绕主体参考框架的 Z 轴进行旋转。起初,惯性框架和车身参考框架是对齐的。刚性变换块将身体参照系的 X 轴旋转-90 度,这样变换后的 Y 轴就指向重力矢量的方向,而链接可以沿变换后的 Z 轴自由旋转。
将两个链接的末端帧作为模拟 IMU 的传感器帧。每个 IMU 都定义在一个 IMU 子系统中。
二、IMU 子系统
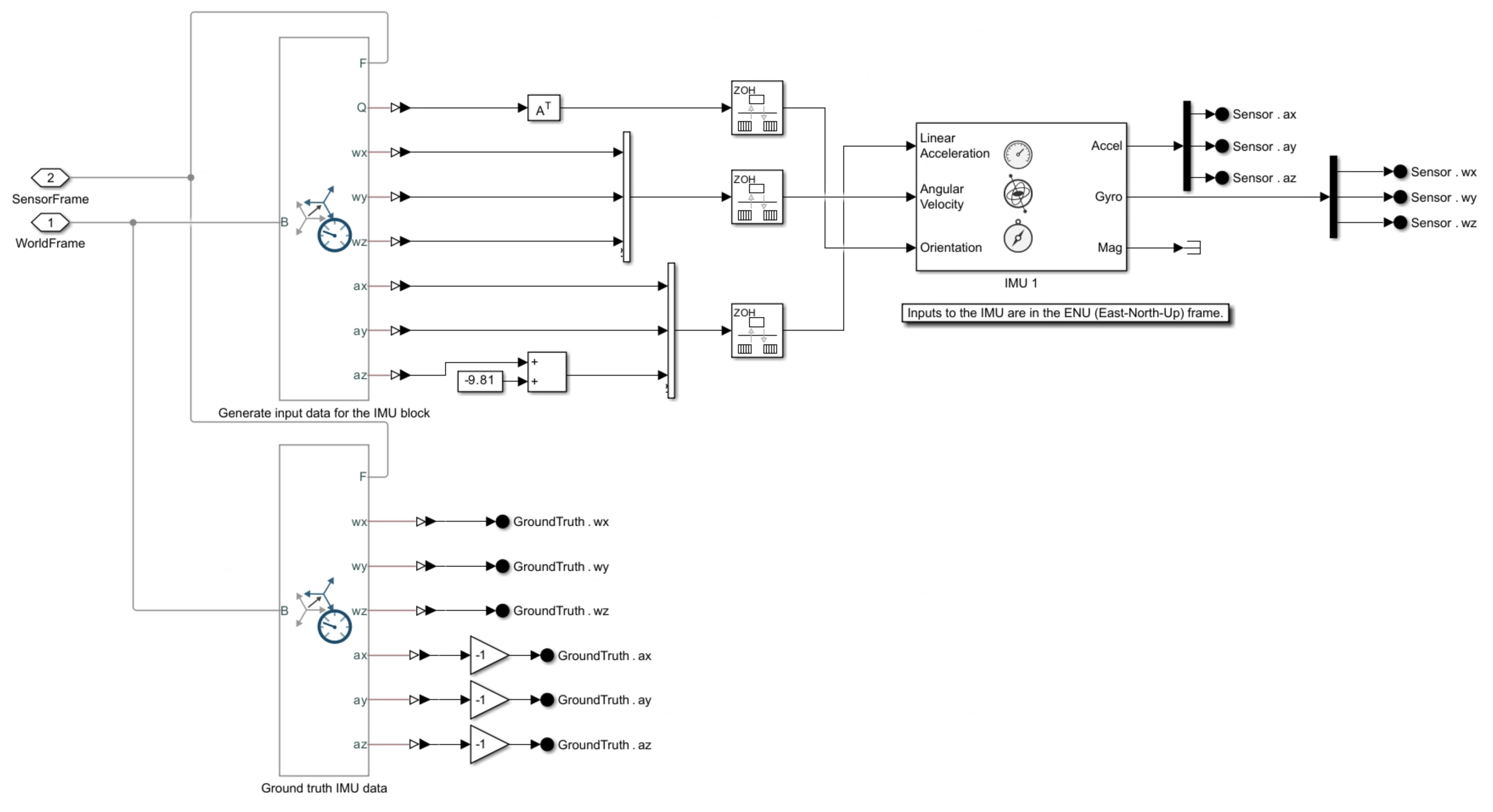
您可以选择 IMU 输入的参考框架为 NED(北-东-下)或 ENU(东-北-上)框架。在本模拟中,您选择的是 ENU 框架,该框架与右手坐标框架对齐。第一个传感器变换块测量传感器框架和惯性框架之间的相对空间关系。重力加速度值将从总加速度中减去,因为 IMU 模块默认将重力加速度纳入惯性框架。IMU 模块将此信息转化为加速度计、陀螺仪和磁力计传感器数据。
第二个变换传感器模块提供 IMU 的预期地面实况测量数据。它测量惯性帧与传感器帧之间的相对空间关系,传感器帧的测量方法与 IMU 类似。加速度被否定,以补偿 IMU 模型中对加速度的否定。在 IMU 模型中这样做是为了在加速度计处于自由落体状态时获得零总加速度读数。有关 IMU 建模的更多详情,请参阅 imuSensor。
三、模拟和可视化 IMU 数据
由于双摆的主要旋转沿传感器框架的 Z 轴进行,因此 IMU 测量的主要加速度沿 X 轴和 Y 轴进行,主要旋转沿 Z 轴进行。下图显示了来自第二个 IMU 的模拟 IMU 数据,并将这些数据与地面实况进行了比较。
?
out = sim("doublePendulumIMU.slx");
% Simulated measurement data for the second IMU
wz = out.logsout{4}.Values.wz;
ax = out.logsout{4}.Values.ax;
ay = out.logsout{4}.Values.ay;
% Ground truth for the second IMU
wzgt = out.logsout{3}.Values.wz;
axgt = out.logsout{3}.Values.ax;
aygt = out.logsout{3}.Values.ay;
plot(wz);
hold on;
plot(wzgt);
legend("Measurement data","Ground truth");
ylabel("Angular velocity, w_z (rad/s)",Interpreter="tex")
xlabel("Time (s)")
title("Angular velocity along the Z axis")
pbaspect([2 1 1])
hold off;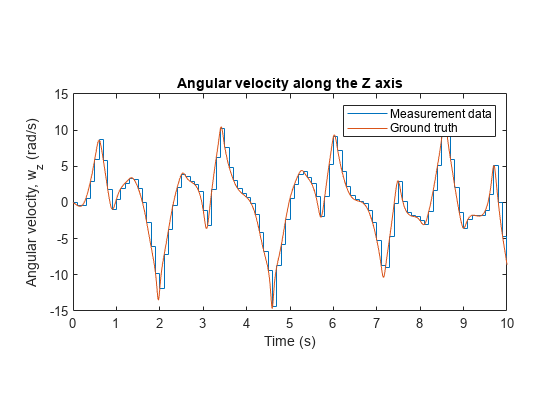
plot(ax);
hold on;
plot(axgt);
legend("Measurement data","Ground truth");
ylabel("Linear acceleration, a_x (m/s^2)",Interpreter="tex")
xlabel("Time (s)")
title("Linear acceleration along the X axis")
pbaspect([2 1 1])
hold off;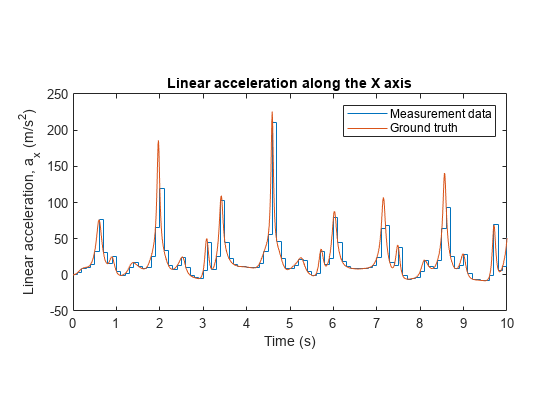 ?
?
plot(ay);
hold on;
plot(aygt);
legend("Measurement data","Ground truth");
ylabel("Linear acceleration, a_{y} (m/s^{2})",Interpreter="tex")
xlabel("Time (s)")
title("Linear acceleration along the Y axis")
pbaspect([2 1 1])
hold off;?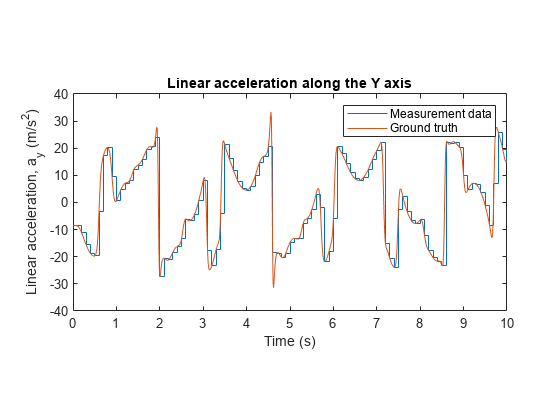
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!