使用相关序列方法做相位校准(附仿真代码)
? ? ? ? TI对天线幅相校准提出了标准的方法和流程,可参考这篇文档使用级联毫米波传感器的成像雷达参考设计1(TI文档)-CSDN博客的3.3节。这里使用自相关序列的方法来对相位做校准。
????????自相关(Autocorrelation),也叫序列相关,是一个信号与其自身在不同时间点的互相关。非正式地来说,自相关是对同一信号在不同时间的两次观察,通过对比来评判两者的相似程度。自相关函数就是信号x(t)和它的时移信号x(t-τ)的乘积平均值。它是时移变量τ的函数。
????????用数学的语言表述,则是:自相关函数是信号在时域中特性的平均度量,它用来描述信号在一个时刻的取值与另一时刻取值的依赖关系。数学上是这样定义的:
????????![]()
????????假设有一个余弦信号:?![]()
????????根据定义,有:
????????
? ? ? ? 当相位相等时,相关曲线的幅值最大,可以利用这一特性来估算天线不同通道之间的相位差,然后做相位校准。
? ? ? ? 这里以TI的AWR2944芯片为例,仿真4发4收DDMA模式下的天线通道相位校准。
? ? ? ? 首先,生成16个虚拟接收通道的信号,由于目标位置相同,收到的信号除了相位,幅度和频率都一样,这样画图时就会混叠在一起,不方便观察,因此这里给每个信号添加一个直流偏置,使得每个通道的信号能从幅度上区分。

? ? ? ? 增加直流分量的各通道信号如下,每个通道的余弦信号非常直观,可以看到每个信号的幅值、频率基本一样,但相位略有区别。

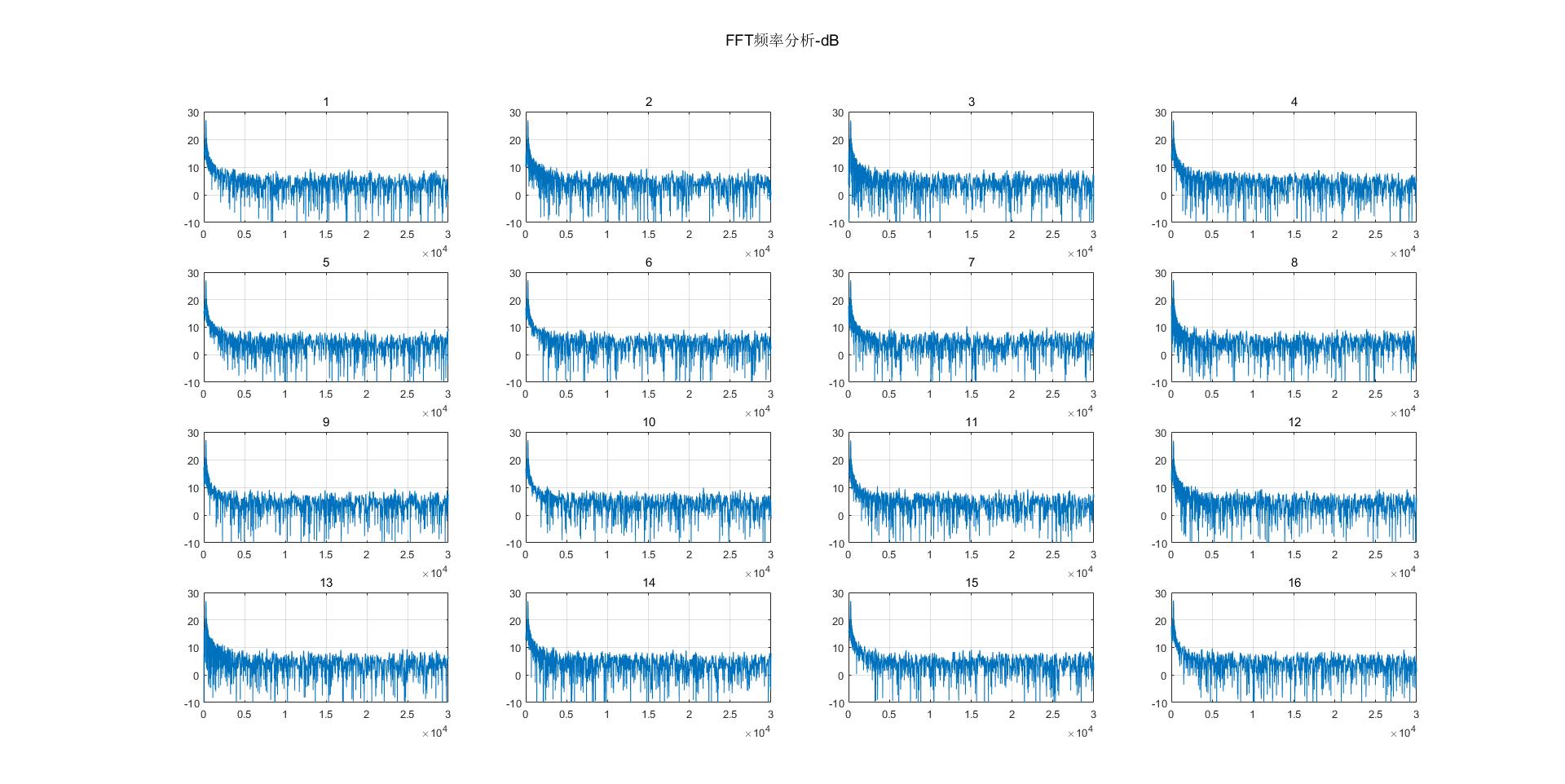
? ? ? ?对每个通道做FFT,可以看到每个通道的频谱,通过峰值搜索得到频率值。
? ? ? ? 最后以第1各通道为基准,计算与所有通道的相关函数,通过给定不同时延(与相位线性变化),得到相关曲线。再搜索所有相关曲线的最大值,索引得到相位偏差值。

? ? ? ? 计算结果表明,通过校准,平均相位误差可以调整到小于2°。
????????完整代码如下。
% 发射波形和接收波形信号
clc;clear;
close all;
N = 16; % 通道数
L = 1000; % 时域信号序列长度
fs = 60000; % 采样频率
ts = 1/fs; % 采样时间间隔
t = ts:ts:L*ts; % 时间序列
phase = 0:0.1*pi:(N-1)*0.1*pi; % 每个通道的初始相位,单位弧度
A = 2.5:2.5:N*2.5;
s = zeros(N, L);
ss = zeros(N, L); % 增加直流分量用于区分显示
f = 259; % 信号频率
for i = 1:N
s(i,:) = cos(2*pi*f*t + phase(i)) + 0.1*randn(1,L);
ss(i,:) = A(i) + s(i,:);
end
% 画出时域信号
figure;
plot(t, s);
grid on;
title('混叠在一起的16通道信号');
figure;
plot(t, ss);
grid on;
legend('1','2','3','4','5','6','7','8','9','10','11','12','13','14','15','16');
title('用直流幅度区分的16通道信号');
Nf = 65536; % 计算FFT的点数
df = fs/Nf; % 频率分辨率
s_fft = zeros(N,Nf); % s的FFT结果
for i = 1:N
s_fft(i,:) = 10*log10(abs(fft(s(i,:),Nf)));
end
% 画出FFT幅值结果
figure;
for i = 1:N
subplot(4,4,i);
plot((1:Nf/2)*df,s_fft(i,(1:Nf/2)));
ylim([-10,30]);
grid on;
title(num2str(i));
end
suptitle('FFT频率分析-dB');
% 通过最大幅值响应计算频率
[fft_max, index] = max(s_fft,[],2);
f_cal = index*df;
f_cal = mean(f_cal);
f_error = f_cal - f;
% 相移精度,单位°
d_phase = 360*f*ts;
min_dots = 360 / d_phase;
corr_num = floor(min_dots) + 1;
s_corr_sum = zeros(N,corr_num);
% 通过自相关(互相关)计算相移,这里只取一个周期用来计算
for i = 1:N
for j = 1:corr_num
s_corr = s(1,j:j+corr_num-1).*s(i,1:corr_num);
s_corr_sum(i,j) = sum(s_corr);
end
end
% 画出时域信号相关曲线
figure;
for i = 1:N
subplot(4,4,i);
plot(1:corr_num,s_corr_sum(i,:));
grid on;
title(num2str(i));
end
suptitle('第1通道为基准的相关曲线');
% 取自相关最大值索引为相移值
[max_sum,index] = max(s_corr_sum,[],2);
phase_cal = index*d_phase;
phase_error = phase_cal - phase'*180/pi; % 这里单位转成°
phase_mean_error = mean(phase_error(2:N));
参考资料:
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!