普冉(PUYA)单片机开发笔记(7): ADC-轮询式多路采样
概述
应用中经常会有使用单片机进行模数转换的需求。PY32F003 具有 1 个 12 位的模拟数字转换器(ADC),今天我们一起来使用一下这个 ADC。
数据手册中对 ADC 简介如下。

SAR ADC:逐次逼近式 ADC,原理参见“参考链接:什么是SAR ADC? - 知乎”。12位采样值的最大值4095。数据手册上标明的最大可用通道数量是 8 个外部通道,但对照 PY32F003F18P 的管脚复用表,如果应用中还要使用 GPIO,LED,定时器 和 UART 的话,可使用的外部 ADC 通道数最多不超过 6 个。对比于 PY32F003F18P 的 20 脚封装和低廉的芯片价格,这样的 MCU 可以在应用中采样 6 个外部模拟量通道也是相当可观的数量了。
PY32F003 可以在不使用外部晶振的情况下完成数模转换,但其采样精度还需要验证。今天先尝试着把 ADC 的功能跑通先。
实现代码
参考在 STM32F103 上实现 ADC 的思路,在 PY32F003 上完成一下看。大致的步骤如下:
- 为 ADC1 指定 GPIO 管脚,并设置其复用功能
- 对 ADC1 进行初始化
- 在主循环中进行采样和打印输出
在 main.h 中增加和 ADC 相关的函数声明
/** ----------------------------------------------------------------------------
* @name : void ADC_Init(void)
* @brief : ADC 初始化
* @param : [in] None
* @retval : [out] void
* @remark :
*** ----------------------------------------------------------------------------
*/
void ADC_Init(void);
/** ----------------------------------------------------------------------------
* @name : HAL_StatusTypeDef ADC_Sample(char * sampleResult)
* @brief : 获取 ADC 的采样结果,结果存放在 sampleResult 字符串中
* @param : [in] None
* @retval : [out] HAL_HandleTypeDef. 操作成功返回 HAL_OK, 错误返回错误码。
* @remark : sampleResult 是格式化的字符串,需要解析
*** ----------------------------------------------------------------------------
*/
HAL_StatusTypeDef ADC_Sample(char * sampleResult);在 app_adc.c 文件中实现函数功能
在 Application/User 组增加 app_adc.c 文件,完整代码如下。
/**
******************************************************************************
* @file app_adc.c
* @brief Application level Analog-Digital Conveter codes.
******************************************************************************
* @attention
*
* Copyright (c) 2023 CuteModem Intelligence.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
#include "main.h"
ADC_HandleTypeDef hadc;
uint32_t adc_value[3];
/********************************************************************************************************
* @name : HAL_StatusTypeDef ADC_Sample(char * sampleResult)
* @brief : 获取 ADC 的采样结果,结果存放在 sampleResult 字符串中
* @param : [in] None
* @retval : [out] HAL_HandleTypeDef. 操作成功返回 HAL_OK, 错误返回错误码。
* @remark : sampleResult 是格式化的字符串,需要解析
********************************************************************************************************/
HAL_StatusTypeDef ADC_Sample(char * sampleResult)
{
uint8_t i=0;
if(HAL_ADCEx_Calibration_Start(&hadc) != HAL_OK)
return HAL_ERROR;
HAL_ADC_Start(&hadc); //开始采样
for (i = 0; i < 3; i++)
{
HAL_ADC_PollForConversion(&hadc, 10000); //等待ADC转换
adc_value[i] = HAL_ADC_GetValue(&hadc); //获取AD值
}
#if(1)
// excel format
sprintf(sampleResult,
"%d,%d,%d",
(uint16_t)adc_value[0],
(uint16_t)adc_value[1],
(uint16_t)adc_value[2]);
#else
// JSON format
sprintf(sampleResult,
"[{\"C\":0,\"D\":%d}"
",{\"C\":1,\"D\":%d}"
",{\"C\":5,\"D\":%d}"
"]",
(uint16_t)adc_value[0],
(uint16_t)adc_value[1],
(uint16_t)adc_value[2]);
#endif
HAL_ADC_Stop(&hadc); // 停止采样
return HAL_OK;
}
void ADC_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
__HAL_RCC_ADC_FORCE_RESET();
__HAL_RCC_ADC_RELEASE_RESET();
__HAL_RCC_ADC_CLK_ENABLE();
hadc.Instance = ADC1;
if (HAL_ADCEx_Calibration_Start(&hadc) != HAL_OK) //AD校准
Error_Handler();
/* Configure global features of the ADC1 */
hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV1; //ADC_CLOCK_SYNC_PCLK_DIV2/4,分频系数
hadc.Init.Resolution = ADC_RESOLUTION_12B; //设置采样位数
hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT; //右对齐
hadc.Init.ScanConvMode = ADC_SCAN_DIRECTION_FORWARD; //扫描方向设置
hadc.Init.EOCSelection = ADC_EOC_SINGLE_CONV; //ADC_EOC_SINGLE_CONV:单次采样 ; ADC_EOC_SEQ_CONV:序列采样
hadc.Init.LowPowerAutoWait = ENABLE; //ENABLE:读取ADC值后,开始下一次转换; DISABLE:直接转换
hadc.Init.ContinuousConvMode = DISABLE; //ENABLE:连续模式, DISABLE:单次模式
hadc.Init.DiscontinuousConvMode = DISABLE; //非连续转换模式设置
hadc.Init.ExternalTrigConv = ADC_SOFTWARE_START; //触发模式设置
hadc.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE; //外部触发沿设置
hadc.Init.DMAContinuousRequests = DISABLE; //DMA连续模式设置
hadc.Init.Overrun = ADC_OVR_DATA_OVERWRITTEN; //ADC_OVR_DATA_OVERWRITTEN:过载时覆盖,ADC_OVR_DATA_PRESERVED:保留旧值
if (HAL_ADC_Init(&hadc) != HAL_OK) Error_Handler(); //初始化ADC
/* Configure selected ADC channels */
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = ADC_RANK_CHANNEL_NUMBER;
sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5;
if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK)
Error_Handler();
sConfig.Channel = ADC_CHANNEL_1;
sConfig.Rank = ADC_RANK_CHANNEL_NUMBER;
sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5;
if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK)
Error_Handler();
sConfig.Channel = ADC_CHANNEL_4;
sConfig.Rank = ADC_RANK_CHANNEL_NUMBER;
sConfig.SamplingTime = ADC_SAMPLETIME_71CYCLES_5;
if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK)
Error_Handler();
}
在 app_adc.c 中定义了业务所需的变量,功能函数也在一个 .c 文件中全部实现。这样做是参考了面向对象的编程模式,遵循代码/变量和功能解耦的原则,ADC 所需的全局变量都在 app_adc.c 中定义,main.c 中就不用再引用 ADC 相关的变量,也不用关心实现的细节了。唯一的接口就是 ADC_Sample() 函数的 sampleResult,sampleResult 定义为一个字符串具有很好的通用性,并隐藏了实现的细节。这里例子中被注释掉的 JSON 串返回结果的代码,在实际应用中,在上一层的业务逻辑处理是很方便的。当然 MCU 编程,一般不会采用 JSON 这种富文本的格式,这里只作为一种示例。
ADC_Sample() 函数中每次采样之前都对 ADC 进行了校准,校准完成后开始采样,采样完毕后停止 ADC。
在 py32f0xx_hal_msp.c 文件中指定 GPIO 及其复用功能
/**
* -----------------------------------------------------------------------
* @name : void HAL_ADC_MspInit(ADC_HandleTypeDef *hadc)
* @brief : 初始化 ADC 相关 MSP
* @param : [in] *hadc, ADC handler pointer
* @retval : void
* @remark :
* -----------------------------------------------------------------------
*/
void HAL_ADC_MspInit(ADC_HandleTypeDef *hadc)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*
=============
PA0/1/4初始化
=============
*/
if (hadc->Instance == ADC1)
{
__HAL_RCC_ADC_CLK_ENABLE(); /* Peripheral clock enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*
ADC GPIO Configuration
PA0 ------> ADC_IN0
PA1 ------> ADC_IN1
PA4 ------> ADC_IN5
*/
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_4; // 指定 PA0/1/4
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; // 设置为模拟端口
GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 下拉:无输入时采样值接近零
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 执行初始化
}
}按照厂家例程的文件组织,所有的 HAL_xxx_MspInit() 集中在 py32_f0xx_hal_msp.c 文件中,由于在 ADC_Init() 函数中调用了 HAL_ADC_Init() 函数,要调用 HAL_ADC_MspInit(),这个函数在 HAL 库中的原型是 weak 类型的,并且是一个空函数,因此需要在实用中重写。
当然,把 HAL_ADC_MspInit() 函数在 app_adc.c 文件中实现也是可以的。
修改 DEBUG 口的管脚映射
PY32F003 ADC1 的通道 0/1/5 复用了 PA0/1/4,之前的实验中,PA1/0 被用作了 DEBUG 口 UART2,和 ADC1 的通道是冲突的,所以需要把 DEBUG 口对应的管脚挪走。查了数据手册,AF4 组的 PA2/3 可以用作 UART2,修改 UART_Config() 如下。
除了修改管脚映射以外,中断优先级等的不做修改。
HAL_StatusTypeDef USART_Config(void)
{
// Using PA2/PA3 (TX/RX)
HAL_StatusTypeDef conf_res = HAL_OK;
GPIO_InitTypeDef GPIO_InitStruct;
gUartInited = 0;
//====================
// USART2初始化
//====================
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
UartHandle.Instance = USART2;
UartHandle.Init.BaudRate = 115200;
UartHandle.Init.WordLength = UART_WORDLENGTH_8B;
UartHandle.Init.StopBits = UART_STOPBITS_1;
UartHandle.Init.Parity = UART_PARITY_NONE;
UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
UartHandle.Init.Mode = UART_MODE_TX_RX;
conf_res = HAL_UART_Init(&UartHandle);
if(conf_res != HAL_OK) return conf_res;
/**USART2 GPIO Configuration
PA2 ------> USART2_TX
PA3 ------> USART2_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_2 | GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_NVIC_SetPriority(USART2_IRQn, 0, 3); // 使能NVIC
HAL_NVIC_EnableIRQ(USART2_IRQn); // 使能USART2中断
gUartInited = 1;
return conf_res;
}在 main.c 的主循环中采样
int main(void)
{
HAL_Init(); // systick初始化
SystemClock_Config(); // 配置系统时钟
GPIO_Config();
if(USART_Config() != HAL_OK) Error_Handler();
printf("[SYS_INIT] Debug port initilaized.\r\n");
ADC_Init();
printf("[SYS_INIT] ADC initilaized.\r\n");
printf("\r\n+---------------------------------------+"
"\r\n| PY32F003 MCU is ready. |"
"\r\n+---------------------------------------+"
"\r\n 10 digits sent to you! "
"\r\n+---------------------------------------+"
"\r\n");
if (DBG_UART_Start() != HAL_OK) Error_Handler();
char sres[64]={0};
uint8_t sIndex = 0;
while (1)
{
BSP_LED_Toggle(LED3);
if(sIndex % 2 == 0)
{
if(ADC_Sample(sres) == HAL_OK)
{
printf("%s\r\n", sres);
}
else
{
printf("Sample error.\r\n");
}
}
sIndex ++;
}
HAL_Delay(500);
}
代码中,主循环每 0.5s 翻转一次 LED,每 1s 采样一次。
实验结果
初次跑通
按照上述步骤编写好代码,编译烧录,在 XCOM 上得到的结果如图。初次运行,PA0/1/4 出于悬空状态,得到的采样值是随机的。
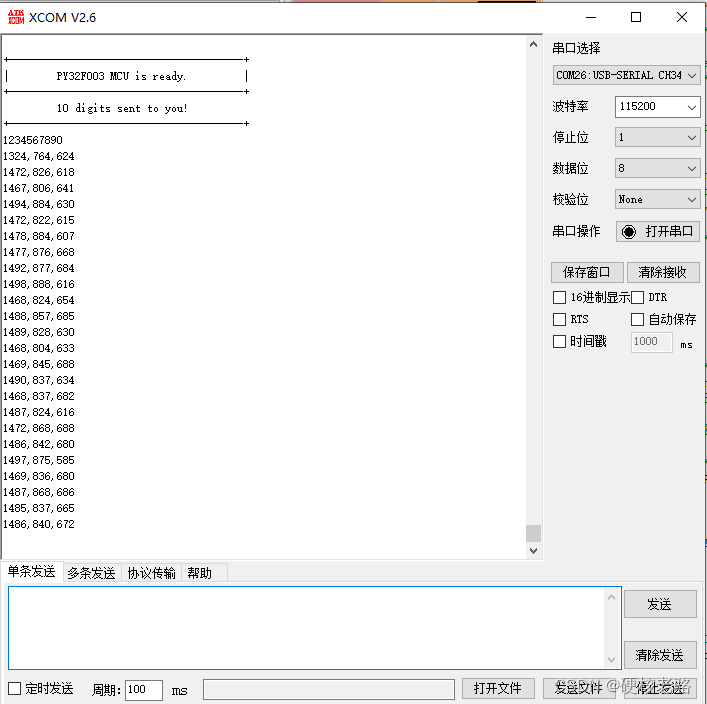
注意到在 HAL_ADC_MspInt() 函数中,将 PA0/1/4 这三个管脚的 PULL 属性都设置成了 PULLDOWN,本想着即使悬空的话仍可得到接近 0 的采样值。但实验结果中,PA0 的悬空状态采样值仍在 1480 多的值,折合成电压为
? 1480/4096*3.3 = 1.192V
这个值挺高的,而 PA1/4 管脚换算得到的电压值分别为 0.661/0.524V,这两个值也不低。这说明 PY32F003 的内部下拉应该是“弱下拉”——或许,在 HAL_ADC_Init() 函数中又对这几个管脚做了什么配置?这个问题留着以后关注。
基于此,在实际项目中用到 PY32F003 进行 ADC 时,在信号管脚接入前,要使用一个(或一组)运放做一下电压跟随才好。
采样时长
在 HAL_ADC_ConfigChannel() 中,设置了采样周期均为 71.5,加上转换的耗费 12.5 周期,合计84 个时钟周期,计算得到采样时间为 3.5us 一次,也挺快了了。
对 GND 和 VCC 的采样值
将 PA0 接地,然后再观察其采样值,得到了全“0”的采样结果。
将 PA0 接 3.3V 管脚,50次采样得到的平均值是 4087.22,换算得到 3.293V,也还好。
PULLUP 还是 PULLDOWN,还是 NOPULL?
把 PA0/1/4 都设置为内部上拉/下拉/无上下拉状态时,PA0 接地,测得 PA1/4 的采用值分别是:
PULLUP:2.159/2.191V,PULLDOWN:0.242/0.322V,NOPULL:1.990/3.061V
PA1和PA4的特性略有不同。
PA0 得到的采样值均为0,这说明管脚的 PULL 被初始化的状态不会对采样的测量值产生影响。
在 PA0 接 VCC 时,不论其 PULL 属性如何,对采样值也没有影响。
总结
- 根据厂家例程移植,跑通 ADC 的轮询式采样是比较简单的。如果熟悉对 STM32 的 ADC 配置,可以照搬 STM32 的步骤。
- 分配 ADC1 的采样通道时,要把开发板默认的 UART2 管脚和 ADC1 的采样通道管脚错开。
- 当某一管脚配置为模拟信号时,其管脚的 PULL 属性对测量结果无影响。
- 实用中,ADC1 的采样输入管脚最好使用运放做一个电压跟随器。
- 0~VCC 中间值的采样精度如何,尚未验证,留待后续实验完成。
后续还会继续尝试使用 DMA 的 ADC,敬请期待。
谬误之处,恳请指正。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!