自动驾驶学习笔记(十六)——目标跟踪
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
文章目录
前言
??????? 见《自动驾驶学习笔记(十一)——高精地图》
????????见《自动驾驶学习笔记(十二)——定位技术》
????????见《自动驾驶学习笔记(十三)——感知基础》
????????见《自动驾驶学习笔记(十四)——感知算法》
????????见《自动驾驶学习笔记(十五)——交通灯识别》
????????自动驾驶中的目标跟踪流程如下图所示:

匹配关联
????????匹配关联的主要目的是:根据运动目标相关的特征值,将障碍物序列中连续帧的同一运动目标关联起来,得到每顿数据中目标的运动参数,以及相邻帧间目标的对应关系。
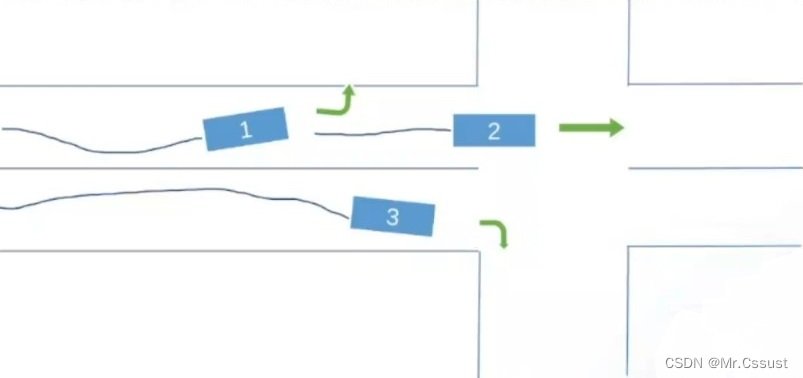
????????相邻两个计算周期内检测到的目标示例如下:

????????以目标的类型、大小、位置等特征值,使用匈牙利算法进行匹配,示例如下:

????????障碍物匹配结果如下:
| 前一帧 | 后一帧 |
| 1 | b |
| 2 | c |
| 3 | a |
| 4 | 消失 |
| / | 新增d |
轨迹记录
????????根据相邻帧间目标的对应关系,把每个时刻串联起来,从而得到障碍物完整的运动轨迹,示例如下。

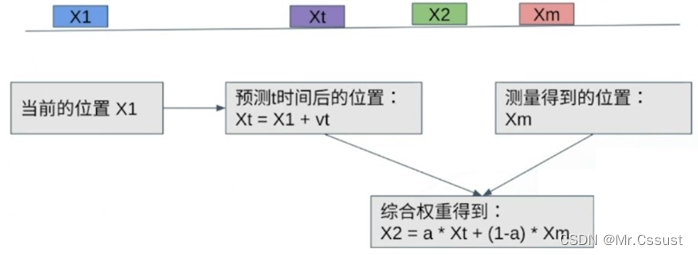
状态预测
????????根据目标的轨迹可以计算得到航向,再根据轨迹中每个点的时间戳,可以计算得到目标速度和加速度等状态信息。
????????预测得到的目标状态信息可用于卡尔曼滤波算法更新运动状态,也可用于目标未来走向的预测,示例如下:
总结
????????以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
????????另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
????????版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
????????文中部分图片来源自网络,若有侵权,联系立删。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!