自动驾驶学习笔记(二十二)——自动泊车算法
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《Apollo开放平台9.0专项技术公开课》免费报名—>传送门
文章目录
前言
????????见《自动驾驶学习笔记(十七)——视觉感知》
????????见《自动驾驶学习笔记(十八)——Lidar感知》
????????见《自动驾驶学习笔记(十九)——Planning模块》
????????见《自动驾驶学习笔记(二十)——Planning算法》????????
????????见《自动驾驶学习笔记(二十一)——自动泊车系统》
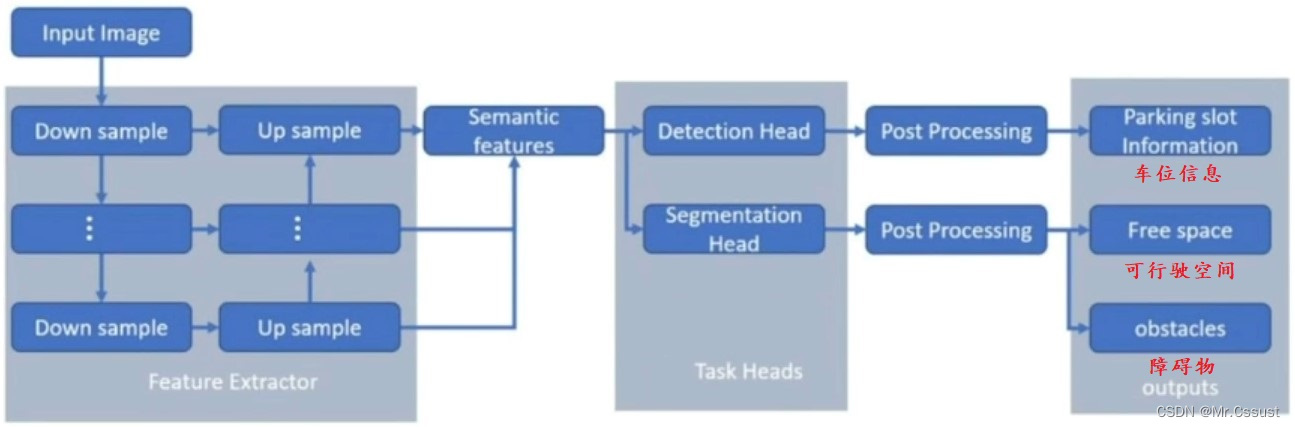
感知算法
????????自动泊车中的感知算法,示例如下:
定位算法
????????自动泊车中的定位算法有:DR定位、高精地图特征感知定位、SLAM建图定位等,其中最常用的是DR定位。
????????DR(航位推算法,Dead Reckoning)根据轮速或车轮脉冲,方向盘转角和车轮转角的对应关系可以推算出车相对于初始位置和姿态,可以对目标和车辆自身提供定位信息。示例如下:


规划算法
????????自动泊车中常用的规划算法有:Hybrid A*、Reed Sheep等,示例如下:

????????2010年,斯坦福首次提出一种满足车辆运动学的算法(Hybrid A*),并在(DARPA)的城市挑战赛中得以运用。核心原理是找最短路线和备选路线,然后分别计算路径代价和启发代价,求得最佳选项。
控制算法
????????自动泊车中的控制算法包括加速控制、制动控制和转向控制,前两者都要求不高,要求较高的是转向控制。其中最核心的是方向盘转角、前轮偏转角和车辆转弯半径之间非线性关系的确定,常用的方法有如下三种:
????????方法一:用尽可能准确的车辆运动模型

????????R:后轴中心转弯半径
????????W:左右轮间距
????????H:轴距
????????βR:右轮偏转角
????????βL:左轮偏转角
????????方法二:曲线拟合
????????三次拟合方向盘转角与前轮转角,得到拟合系数a1、a2、a3、a4
![]()
????????x方向盘转角
????????β前轮偏转角
????????方法三:线性插值
????????实验数据插点数表
算法调试
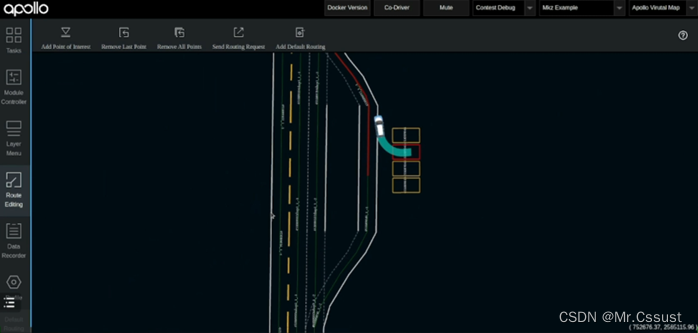
????????自动泊车中算法的调试一般会在如下三个阶段中交叉使用:
????????阶段一:搭建仿真场景,虚拟调试,示例如下:
????????阶段二:实车调试(不再赘述)
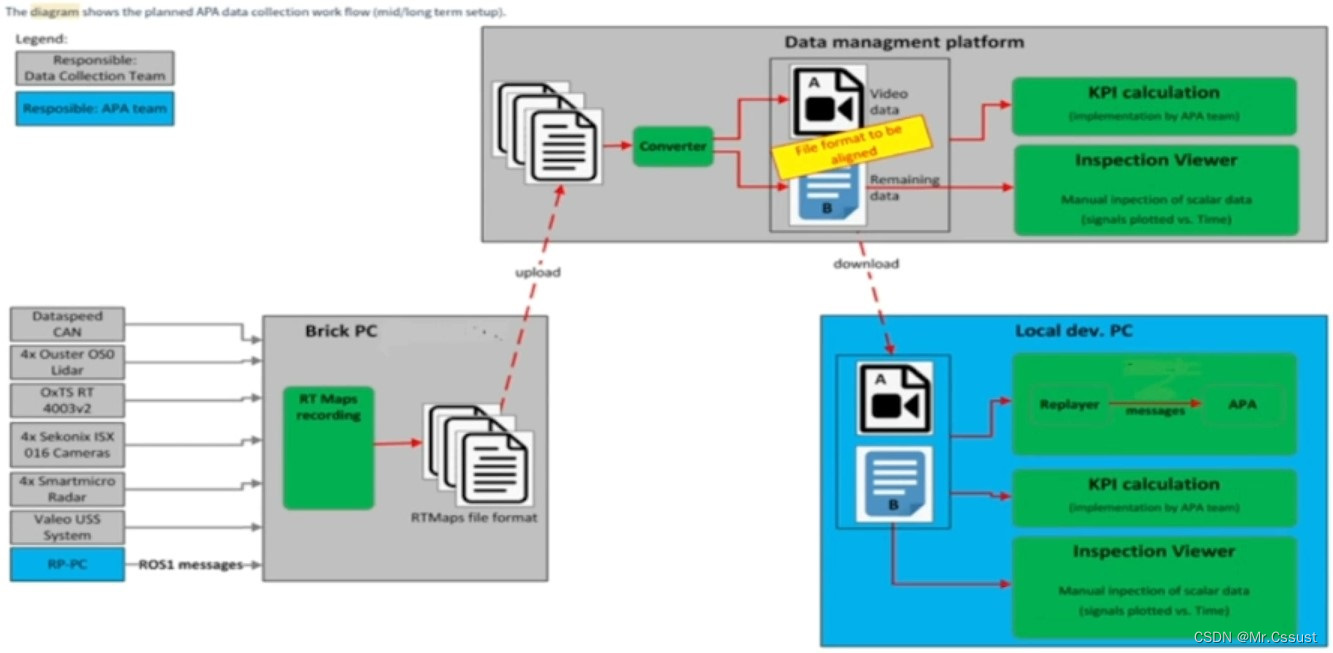
????????阶段三:采集数据,回放,仿真调试,示例如下:
总结
????????以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
????????另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
????????版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
????????文中部分图片来源自网络,若有侵权,联系立删。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!