[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System
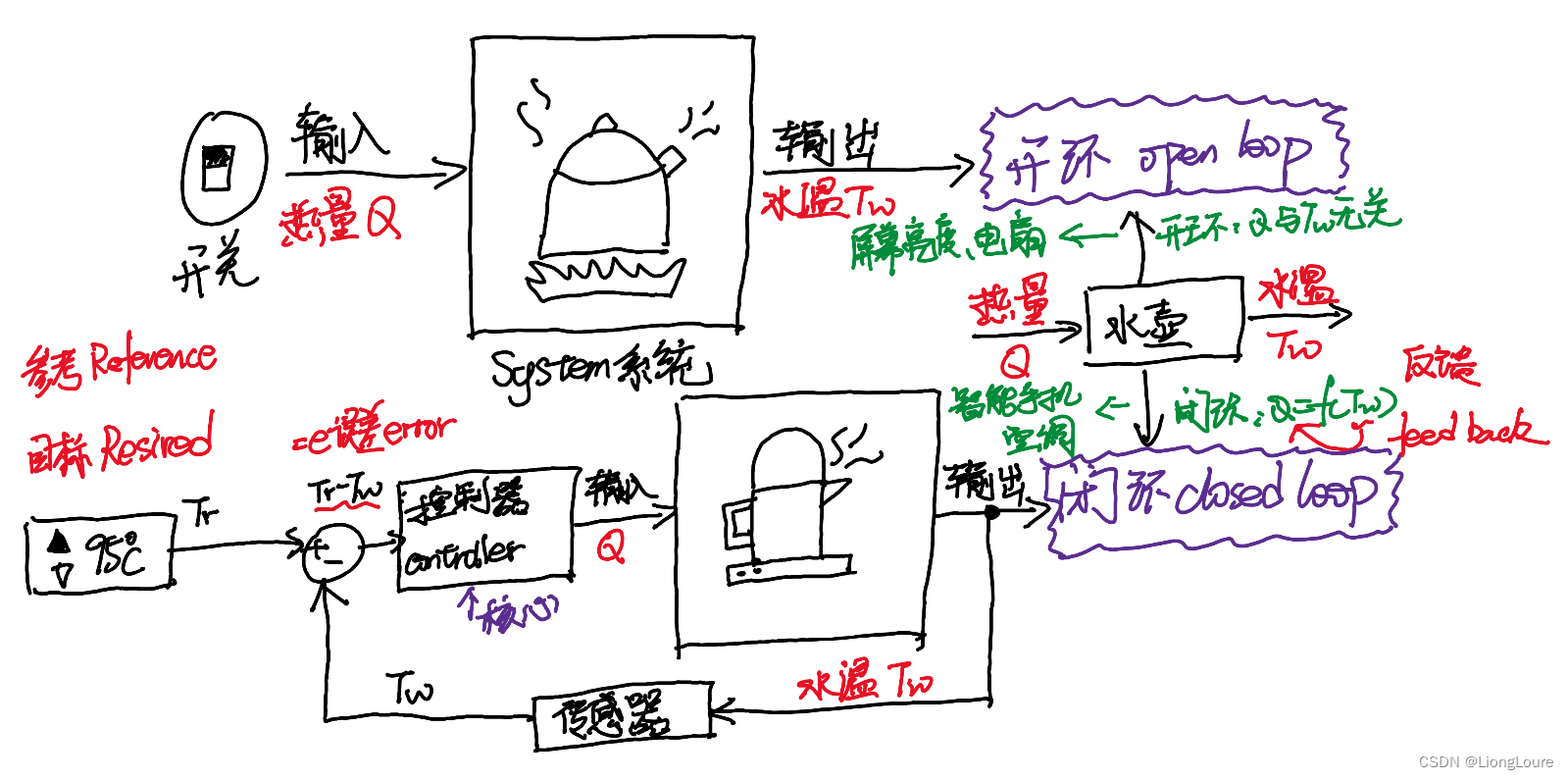
EG1: 烧水与控温水壶
EG2: 蓄水与最终水位

h
˙
=
q
i
n
A
?
g
h
A
R
\dot{h}=\frac{q_{in}}{A}-\frac{gh}{AR}
h˙=Aqin???ARgh?
设
A
=
1
A=1
A=1. 目标:
h
=
x
→
x
d
h=x\rightarrow x_d
h=x→xd? —— 保持液面高度
x
d
=
C
R
g
,
C
=
x
d
g
R
=
u
,
G
(
s
)
=
1
S
+
g
R
x_d=\frac{CR}{g},C=\frac{x_dg}{R}=u,G\left( s \right) =\frac{1}{S+\frac{g}{R}}
xd?=gCR?,C=Rxd?g?=u,G(s)=S+Rg?1?
闭环控制系统
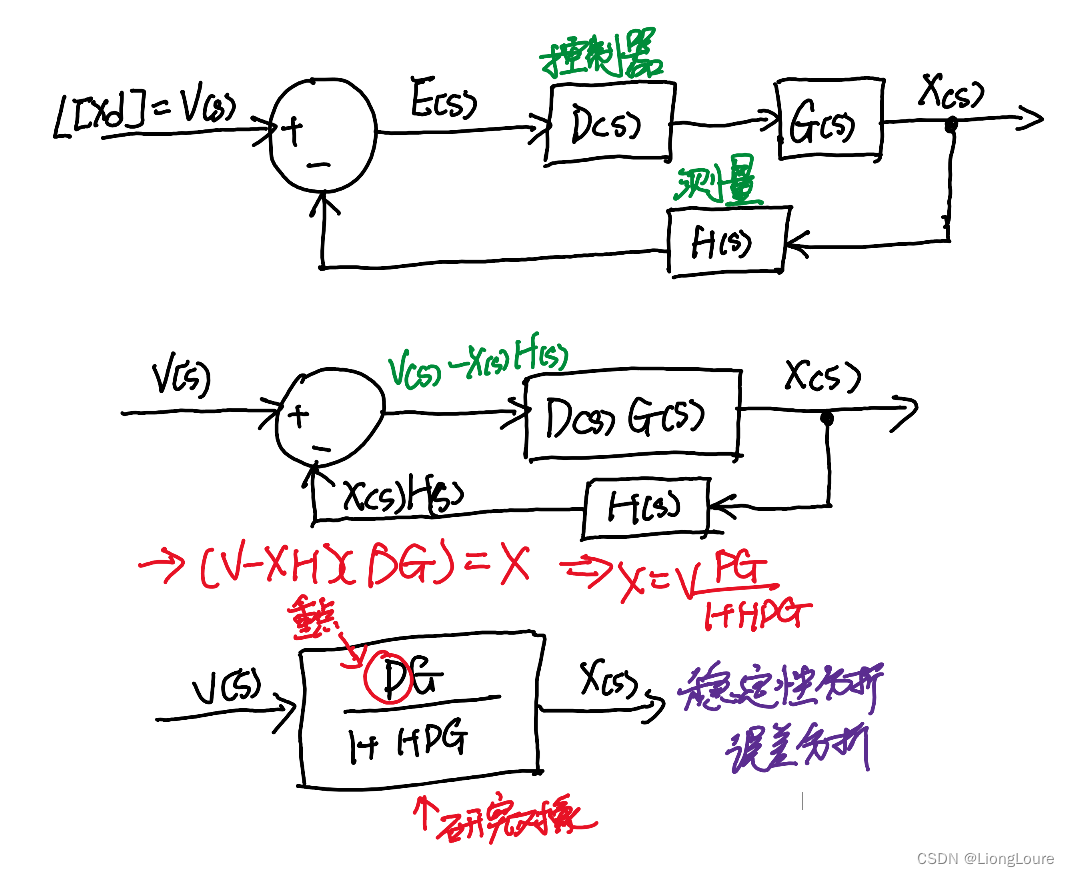
X
=
D
G
1
+
H
D
G
V
X=\frac{DG}{1+HDG}V
X=1+HDGDG?V
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!