YOLOv8融合改进 更换检测头为Detect_DyHead同时添加C2f-EMSC和C2f-EMSCP模块
2024-01-07 18:25:46

一、Detect_DyHead检测头和C2f-EMSC,C2f-EMSCP模块
详细介绍和代码在往期的博客里:
Detect_DyHead:
(YOLOv8改进检测头Detect为Detect_Dyhead-CSDN博客)
C2f-EMSC和C2f-EMSCP:
(YOLOv8改进之多尺度转换模块C2f-EMSC和C2f-EMSCP-CSDN博客)
二、算法实现
1、将检测头和C2f的模块融合:
ultralytics\ultralytics\nn\other_modules文件夹中要是dyhead检测头要用到的kernel_warehouse.py(开头提到的博客中包含py文件的详细代码)
ultralytics\ultralytics\nn\other_modules\block.py中的代码为:
import torch
import torch.nn as nn
import torch.nn.functional as F
from ultralytics.nn.modules import Conv
from ..modules.block import *
from einops import rearrange
__all__ = ['DyHeadBlock','C2f_EMSC', 'C2f_EMSCP']
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
########## 添加DyHead ###########
try:
from mmcv.cnn import build_activation_layer, build_norm_layer
from mmcv.ops.modulated_deform_conv import ModulatedDeformConv2d
from mmengine.model import constant_init, normal_init
except ImportError:
pass
def _make_divisible(v, divisor, min_value=None):
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_v < 0.9 * v:
new_v += divisor
return new_v
class swish(nn.Module):
def forward(self, x):
return x * torch.sigmoid(x)
class h_swish(nn.Module):
def __init__(self, inplace=False):
super(h_swish, self).__init__()
self.inplace = inplace
def forward(self, x):
return x * F.relu6(x + 3.0, inplace=self.inplace) / 6.0
class h_sigmoid(nn.Module):
def __init__(self, inplace=True, h_max=1):
super(h_sigmoid, self).__init__()
self.relu = nn.ReLU6(inplace=inplace)
self.h_max = h_max
def forward(self, x):
return self.relu(x + 3) * self.h_max / 6
class DyReLU(nn.Module):
def __init__(self, inp, reduction=4, lambda_a=1.0, K2=True, use_bias=True, use_spatial=False,
init_a=[1.0, 0.0], init_b=[0.0, 0.0]):
super(DyReLU, self).__init__()
self.oup = inp
self.lambda_a = lambda_a * 2
self.K2 = K2
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.use_bias = use_bias
if K2:
self.exp = 4 if use_bias else 2
else:
self.exp = 2 if use_bias else 1
self.init_a = init_a
self.init_b = init_b
# determine squeeze
if reduction == 4:
squeeze = inp // reduction
else:
squeeze = _make_divisible(inp // reduction, 4)
# print('reduction: {}, squeeze: {}/{}'.format(reduction, inp, squeeze))
# print('init_a: {}, init_b: {}'.format(self.init_a, self.init_b))
self.fc = nn.Sequential(
nn.Linear(inp, squeeze),
nn.ReLU(inplace=True),
nn.Linear(squeeze, self.oup * self.exp),
h_sigmoid()
)
if use_spatial:
self.spa = nn.Sequential(
nn.Conv2d(inp, 1, kernel_size=1),
nn.BatchNorm2d(1),
)
else:
self.spa = None
def forward(self, x):
if isinstance(x, list):
x_in = x[0]
x_out = x[1]
else:
x_in = x
x_out = x
b, c, h, w = x_in.size()
y = self.avg_pool(x_in).view(b, c)
y = self.fc(y).view(b, self.oup * self.exp, 1, 1)
if self.exp == 4:
a1, b1, a2, b2 = torch.split(y, self.oup, dim=1)
a1 = (a1 - 0.5) * self.lambda_a + self.init_a[0] # 1.0
a2 = (a2 - 0.5) * self.lambda_a + self.init_a[1]
b1 = b1 - 0.5 + self.init_b[0]
b2 = b2 - 0.5 + self.init_b[1]
out = torch.max(x_out * a1 + b1, x_out * a2 + b2)
elif self.exp == 2:
if self.use_bias: # bias but not PL
a1, b1 = torch.split(y, self.oup, dim=1)
a1 = (a1 - 0.5) * self.lambda_a + self.init_a[0] # 1.0
b1 = b1 - 0.5 + self.init_b[0]
out = x_out * a1 + b1
else:
a1, a2 = torch.split(y, self.oup, dim=1)
a1 = (a1 - 0.5) * self.lambda_a + self.init_a[0] # 1.0
a2 = (a2 - 0.5) * self.lambda_a + self.init_a[1]
out = torch.max(x_out * a1, x_out * a2)
elif self.exp == 1:
a1 = y
a1 = (a1 - 0.5) * self.lambda_a + self.init_a[0] # 1.0
out = x_out * a1
if self.spa:
ys = self.spa(x_in).view(b, -1)
ys = F.softmax(ys, dim=1).view(b, 1, h, w) * h * w
ys = F.hardtanh(ys, 0, 3, inplace=True)/3
out = out * ys
return out
class DyDCNv2(nn.Module):
"""ModulatedDeformConv2d with normalization layer used in DyHead.
This module cannot be configured with `conv_cfg=dict(type='DCNv2')`
because DyHead calculates offset and mask from middle-level feature.
Args:
in_channels (int): Number of input channels.
out_channels (int): Number of output channels.
stride (int | tuple[int], optional): Stride of the convolution.
Default: 1.
norm_cfg (dict, optional): Config dict for normalization layer.
Default: dict(type='GN', num_groups=16, requires_grad=True).
"""
def __init__(self,
in_channels,
out_channels,
stride=1,
norm_cfg=dict(type='GN', num_groups=16, requires_grad=True)):
super().__init__()
self.with_norm = norm_cfg is not None
bias = not self.with_norm
self.conv = ModulatedDeformConv2d(
in_channels, out_channels, 3, stride=stride, padding=1, bias=bias)
if self.with_norm:
self.norm = build_norm_layer(norm_cfg, out_channels)[1]
def forward(self, x, offset, mask):
"""Forward function."""
x = self.conv(x.contiguous(), offset, mask)
if self.with_norm:
x = self.norm(x)
return x
class DyHeadBlock(nn.Module):
"""DyHead Block with three types of attention.
HSigmoid arguments in default act_cfg follow official code, not paper.
https://github.com/microsoft/DynamicHead/blob/master/dyhead/dyrelu.py
"""
def __init__(self,
in_channels,
norm_type='GN',
zero_init_offset=True,
act_cfg=dict(type='HSigmoid', bias=3.0, divisor=6.0)):
super().__init__()
self.zero_init_offset = zero_init_offset
# (offset_x, offset_y, mask) * kernel_size_y * kernel_size_x
self.offset_and_mask_dim = 3 * 3 * 3
self.offset_dim = 2 * 3 * 3
if norm_type == 'GN':
norm_dict = dict(type='GN', num_groups=16, requires_grad=True)
elif norm_type == 'BN':
norm_dict = dict(type='BN', requires_grad=True)
self.spatial_conv_high = DyDCNv2(in_channels, in_channels, norm_cfg=norm_dict)
self.spatial_conv_mid = DyDCNv2(in_channels, in_channels)
self.spatial_conv_low = DyDCNv2(in_channels, in_channels, stride=2)
self.spatial_conv_offset = nn.Conv2d(
in_channels, self.offset_and_mask_dim, 3, padding=1)
self.scale_attn_module = nn.Sequential(
nn.AdaptiveAvgPool2d(1), nn.Conv2d(in_channels, 1, 1),
nn.ReLU(inplace=True), build_activation_layer(act_cfg))
self.task_attn_module = DyReLU(in_channels)
self._init_weights()
def _init_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
normal_init(m, 0, 0.01)
if self.zero_init_offset:
constant_init(self.spatial_conv_offset, 0)
def forward(self, x):
"""Forward function."""
outs = []
for level in range(len(x)):
# calculate offset and mask of DCNv2 from middle-level feature
offset_and_mask = self.spatial_conv_offset(x[level])
offset = offset_and_mask[:, :self.offset_dim, :, :]
mask = offset_and_mask[:, self.offset_dim:, :, :].sigmoid()
mid_feat = self.spatial_conv_mid(x[level], offset, mask)
sum_feat = mid_feat * self.scale_attn_module(mid_feat)
summed_levels = 1
if level > 0:
low_feat = self.spatial_conv_low(x[level - 1], offset, mask)
sum_feat += low_feat * self.scale_attn_module(low_feat)
summed_levels += 1
if level < len(x) - 1:
# this upsample order is weird, but faster than natural order
# https://github.com/microsoft/DynamicHead/issues/25
high_feat = F.interpolate(
self.spatial_conv_high(x[level + 1], offset, mask),
size=x[level].shape[-2:],
mode='bilinear',
align_corners=True)
sum_feat += high_feat * self.scale_attn_module(high_feat)
summed_levels += 1
outs.append(self.task_attn_module(sum_feat / summed_levels))
return outs
###### 添加EMSConv和EMSConvP ######
class EMSConv(nn.Module):
# Efficient Multi-Scale Conv
def __init__(self, channel=256, kernels=[3, 5]):
super().__init__()
self.groups = len(kernels)
min_ch = channel // 4
assert min_ch >= 16, f'channel must Greater than {64}, but {channel}'
self.convs = nn.ModuleList([])
for ks in kernels:
self.convs.append(Conv(c1=min_ch, c2=min_ch, k=ks))
self.conv_1x1 = Conv(channel, channel, k=1)
def forward(self, x):
_, c, _, _ = x.size()
x_cheap, x_group = torch.split(x, [c // 2, c // 2], dim=1)
x_group = rearrange(x_group, 'bs (g ch) h w -> bs ch h w g', g=self.groups)
x_group = torch.stack([self.convs[i](x_group[..., i]) for i in range(len(self.convs))])
x_group = rearrange(x_group, 'g bs ch h w -> bs (g ch) h w')
x = torch.cat([x_cheap, x_group], dim=1)
x = self.conv_1x1(x)
return x
class EMSConvP(nn.Module):
# Efficient Multi-Scale Conv Plus
def __init__(self, channel=256, kernels=[1, 3, 5, 7]):
super().__init__()
self.groups = len(kernels)
min_ch = channel // self.groups
assert min_ch >= 16, f'channel must Greater than {16 * self.groups}, but {channel}'
self.convs = nn.ModuleList([])
for ks in kernels:
self.convs.append(Conv(c1=min_ch, c2=min_ch, k=ks))
self.conv_1x1 = Conv(channel, channel, k=1)
def forward(self, x):
x_group = rearrange(x, 'bs (g ch) h w -> bs ch h w g', g=self.groups)
x_convs = torch.stack([self.convs[i](x_group[..., i]) for i in range(len(self.convs))])
x_convs = rearrange(x_convs, 'g bs ch h w -> bs (g ch) h w')
x_convs = self.conv_1x1(x_convs)
return x_convs
class Bottleneck_EMSC(Bottleneck):
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):
super().__init__(c1, c2, shortcut, g, k, e)
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = EMSConv(c2)
class C2f_EMSC(C2f):
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
self.m = nn.ModuleList(Bottleneck_EMSC(self.c, self.c, shortcut, g, k=(3, 3), e=1.0) for _ in range(n))
class Bottleneck_EMSCP(Bottleneck):
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):
super().__init__(c1, c2, shortcut, g, k, e)
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = EMSConvP(c2)
class C2f_EMSCP(C2f):
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
self.m = nn.ModuleList(Bottleneck_EMSCP(self.c, self.c, shortcut, g, k=(3, 3), e=1.0) for _ in range(n))检测头head.py文件中的代码为:
import math
import torch
import torch.nn as nn
from . import DyHeadBlock
from ..modules import Conv, DFL
from ultralytics.utils.tal import dist2bbox, make_anchors
__all__ = ['DetectAux','Detect_DyHead']
class DetectAux(nn.Module):
"""YOLOv8 Detect head with Aux Head for detection models."""
dynamic = False # force grid reconstruction
export = False # export mode
shape = None
anchors = torch.empty(0) # init
strides = torch.empty(0) # init
def __init__(self, nc=80, ch=()): # detection layer
super().__init__()
self.nc = nc # number of classes
self.nl = len(ch) // 2 # number of detection layers
self.reg_max = 16 # DFL channels (ch[0] // 16 to scale 4/8/12/16/20 for n/s/m/l/x)
self.no = nc + self.reg_max * 4 # number of outputs per anchor
self.stride = torch.zeros(self.nl) # strides computed during build
c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], self.nc) # channels
self.cv2 = nn.ModuleList(
nn.Sequential(Conv(x, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for x in ch[:self.nl])
self.cv3 = nn.ModuleList(
nn.Sequential(Conv(x, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for x in ch[:self.nl])
self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()
self.cv4 = nn.ModuleList(
nn.Sequential(Conv(x, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for x in ch[self.nl:])
self.cv5 = nn.ModuleList(
nn.Sequential(Conv(x, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for x in ch[self.nl:])
self.dfl_aux = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()
def forward(self, x):
"""Concatenates and returns predicted bounding boxes and class probabilities."""
shape = x[0].shape # BCHW
for i in range(self.nl):
x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1)
if self.training:
for i in range(self.nl, 2 * self.nl):
x[i] = torch.cat((self.cv4[i - self.nl](x[i]), self.cv5[i - self.nl](x[i])), 1)
return x
elif self.dynamic or self.shape != shape:
if hasattr(self, 'dfl_aux'):
for i in range(self.nl, 2 * self.nl):
x[i] = torch.cat((self.cv4[i - self.nl](x[i]), self.cv5[i - self.nl](x[i])), 1)
self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x[:self.nl], self.stride, 0.5))
self.shape = shape
x_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x[:self.nl]], 2)
if self.export and self.format in ('saved_model', 'pb', 'tflite', 'edgetpu', 'tfjs'): # avoid TF FlexSplitV ops
box = x_cat[:, :self.reg_max * 4]
cls = x_cat[:, self.reg_max * 4:]
else:
box, cls = x_cat.split((self.reg_max * 4, self.nc), 1)
dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.strides
y = torch.cat((dbox, cls.sigmoid()), 1)
return y if self.export else (y, x[:self.nl])
def bias_init(self):
"""Initialize Detect() biases, WARNING: requires stride availability."""
m = self # self.model[-1] # Detect() module
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1
# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # nominal class frequency
for a, b, s in zip(m.cv2, m.cv3, m.stride): # from
a[-1].bias.data[:] = 1.0 # box
b[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)
for a, b, s in zip(m.cv4, m.cv5, m.stride): # from
a[-1].bias.data[:] = 1.0 # box
b[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)
def switch_to_deploy(self):
del self.cv4, self.cv5, self.dfl_aux
class Detect_DyHead(nn.Module):
"""YOLOv8 Detect head with DyHead for detection models."""
dynamic = False # force grid reconstruction
export = False # export mode
shape = None
anchors = torch.empty(0) # init
strides = torch.empty(0) # init
def __init__(self, nc=80, hidc=256, block_num=2, ch=()): # detection layer
super().__init__()
self.nc = nc # number of classes
self.nl = len(ch) # number of detection layers
self.reg_max = 16 # DFL channels (ch[0] // 16 to scale 4/8/12/16/20 for n/s/m/l/x)
self.no = nc + self.reg_max * 4 # number of outputs per anchor
self.stride = torch.zeros(self.nl) # strides computed during build
c2, c3 = max((16, ch[0] // 4, self.reg_max * 4)), max(ch[0], self.nc) # channels
self.conv = nn.ModuleList(nn.Sequential(Conv(x, hidc, 1)) for x in ch)
self.dyhead = nn.Sequential(*[DyHeadBlock(hidc) for i in range(block_num)])
self.cv2 = nn.ModuleList(
nn.Sequential(Conv(hidc, c2, 3), Conv(c2, c2, 3), nn.Conv2d(c2, 4 * self.reg_max, 1)) for _ in ch)
self.cv3 = nn.ModuleList(nn.Sequential(Conv(hidc, c3, 3), Conv(c3, c3, 3), nn.Conv2d(c3, self.nc, 1)) for _ in ch)
self.dfl = DFL(self.reg_max) if self.reg_max > 1 else nn.Identity()
def forward(self, x):
"""Concatenates and returns predicted bounding boxes and class probabilities."""
for i in range(self.nl):
x[i] = self.conv[i](x[i])
x = self.dyhead(x)
shape = x[0].shape # BCHW
for i in range(self.nl):
x[i] = torch.cat((self.cv2[i](x[i]), self.cv3[i](x[i])), 1)
if self.training:
return x
elif self.dynamic or self.shape != shape:
self.anchors, self.strides = (x.transpose(0, 1) for x in make_anchors(x, self.stride, 0.5))
self.shape = shape
x_cat = torch.cat([xi.view(shape[0], self.no, -1) for xi in x], 2)
if self.export and self.format in ('saved_model', 'pb', 'tflite', 'edgetpu', 'tfjs'): # avoid TF FlexSplitV ops
box = x_cat[:, :self.reg_max * 4]
cls = x_cat[:, self.reg_max * 4:]
else:
box, cls = x_cat.split((self.reg_max * 4, self.nc), 1)
dbox = dist2bbox(self.dfl(box), self.anchors.unsqueeze(0), xywh=True, dim=1) * self.strides
y = torch.cat((dbox, cls.sigmoid()), 1)
return y if self.export else (y, x)
def bias_init(self):
"""Initialize Detect() biases, WARNING: requires stride availability."""
m = self # self.model[-1] # Detect() module
# cf = torch.bincount(torch.tensor(np.concatenate(dataset.labels, 0)[:, 0]).long(), minlength=nc) + 1
# ncf = math.log(0.6 / (m.nc - 0.999999)) if cf is None else torch.log(cf / cf.sum()) # nominal class frequency
for a, b, s in zip(m.cv2, m.cv3, m.stride): # from
a[-1].bias.data[:] = 1.0 # box
b[-1].bias.data[:m.nc] = math.log(5 / m.nc / (640 / s) ** 2) # cls (.01 objects, 80 classes, 640 img)2、修改ultralytics\ultralytics\nn\tasks.py文件
具体修改的步骤在一中提到的两篇博客里有十分详细的步骤和代码修改。
两篇博客中的修改的地方不同,应该按着步骤,把两篇博客中tasks.py文件中的每一个修改过的地方对照修改,最终tasks.py文件的代码如下:
# Ultralytics YOLO 🚀, AGPL-3.0 license
import contextlib
from copy import deepcopy
from pathlib import Path
from ultralytics.nn.other_modules import *
import torch
import torch.nn as nn
from ultralytics.nn.modules import (AIFI, C1, C2, C3, C3TR, SPP, SPPF, Bottleneck, BottleneckCSP, C2f, C3Ghost, C3x,
Classify, Concat, Conv, Conv2, ConvTranspose, Detect, DWConv, DWConvTranspose2d,
Focus, GhostBottleneck, GhostConv, HGBlock, HGStem, Pose, RepC3, RepConv,
RTDETRDecoder,Segment)
from ultralytics.nn.other_modules.kernel_warehouse import Warehouse_Manager
from ultralytics.utils import DEFAULT_CFG_DICT, DEFAULT_CFG_KEYS, LOGGER, colorstr, emojis, yaml_load
from ultralytics.utils.checks import check_requirements, check_suffix, check_yaml
from ultralytics.utils.loss import v8ClassificationLoss, v8DetectionLoss, v8PoseLoss, v8SegmentationLoss
from ultralytics.utils.plotting import feature_visualization
from ultralytics.utils.torch_utils import (fuse_conv_and_bn, fuse_deconv_and_bn, initialize_weights, intersect_dicts,
make_divisible, model_info, scale_img, time_sync)
try:
import thop
except ImportError:
thop = None
class BaseModel(nn.Module):
"""The BaseModel class serves as a base class for all the models in the Ultralytics YOLO family."""
def forward(self, x, *args, **kwargs):
"""
Forward pass of the model on a single scale. Wrapper for `_forward_once` method.
Args:
x (torch.Tensor | dict): The input image tensor or a dict including image tensor and gt labels.
Returns:
(torch.Tensor): The output of the network.
"""
if isinstance(x, dict): # for cases of training and validating while training.
return self.loss(x, *args, **kwargs)
return self.predict(x, *args, **kwargs)
def predict(self, x, profile=False, visualize=False, augment=False):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
augment (bool): Augment image during prediction, defaults to False.
Returns:
(torch.Tensor): The last output of the model.
"""
if augment:
return self._predict_augment(x)
return self._predict_once(x, profile, visualize)
def _predict_once(self, x, profile=False, visualize=False):
"""
Perform a forward pass through the network.
Args:
x (torch.Tensor): The input tensor to the model.
profile (bool): Print the computation time of each layer if True, defaults to False.
visualize (bool): Save the feature maps of the model if True, defaults to False.
Returns:
(torch.Tensor): The last output of the model.
"""
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
if hasattr(m, 'backbone'):
x = m(x)
for _ in range(5 - len(x)):
x.insert(0, None)
for i_idx, i in enumerate(x):
y.append(i if i_idx in self.save else None)
x = x[-1]
else:
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
return x
def _predict_augment(self, x):
"""Perform augmentations on input image x and return augmented inference."""
LOGGER.warning(f'WARNING ?? {self.__class__.__name__} does not support augmented inference yet. '
f'Reverting to single-scale inference instead.')
return self._predict_once(x)
def _profile_one_layer(self, m, x, dt):
"""
Profile the computation time and FLOPs of a single layer of the model on a given input. Appends the results to
the provided list.
Args:
m (nn.Module): The layer to be profiled.
x (torch.Tensor): The input data to the layer.
dt (list): A list to store the computation time of the layer.
Returns:
None
"""
c = m == self.model[-1] and isinstance(x, list) # is final layer list, copy input as inplace fix
flops = thop.profile(m, inputs=[x.copy() if c else x], verbose=False)[0] / 1E9 * 2 if thop else 0 # FLOPs
t = time_sync()
for _ in range(10):
m(x.copy() if c else x)
dt.append((time_sync() - t) * 100)
if m == self.model[0]:
LOGGER.info(f"{'time (ms)':>10s} {'GFLOPs':>10s} {'params':>10s} module")
LOGGER.info(f'{dt[-1]:10.2f} {flops:10.2f} {m.np:10.0f} {m.type}')
if c:
LOGGER.info(f"{sum(dt):10.2f} {'-':>10s} {'-':>10s} Total")
def fuse(self, verbose=True):
"""
Fuse the `Conv2d()` and `BatchNorm2d()` layers of the model into a single layer, in order to improve the
computation efficiency.
Returns:
(nn.Module): The fused model is returned.
"""
if not self.is_fused():
for m in self.model.modules():
if isinstance(m, (Conv, Conv2, DWConv)) and hasattr(m, 'bn'):
if isinstance(m, Conv2):
m.fuse_convs()
m.conv = fuse_conv_and_bn(m.conv, m.bn) # update conv
delattr(m, 'bn') # remove batchnorm
m.forward = m.forward_fuse # update forward
if isinstance(m, ConvTranspose) and hasattr(m, 'bn'):
m.conv_transpose = fuse_deconv_and_bn(m.conv_transpose, m.bn)
delattr(m, 'bn') # remove batchnorm
m.forward = m.forward_fuse # update forward
if isinstance(m, RepConv):
m.fuse_convs()
m.forward = m.forward_fuse # update forward
self.info(verbose=verbose)
return self
def is_fused(self, thresh=10):
"""
Check if the model has less than a certain threshold of BatchNorm layers.
Args:
thresh (int, optional): The threshold number of BatchNorm layers. Default is 10.
Returns:
(bool): True if the number of BatchNorm layers in the model is less than the threshold, False otherwise.
"""
bn = tuple(v for k, v in nn.__dict__.items() if 'Norm' in k) # normalization layers, i.e. BatchNorm2d()
return sum(isinstance(v, bn) for v in self.modules()) < thresh # True if < 'thresh' BatchNorm layers in model
def info(self, detailed=False, verbose=True, imgsz=640):
"""
Prints model information.
Args:
detailed (bool): if True, prints out detailed information about the model. Defaults to False
verbose (bool): if True, prints out the model information. Defaults to False
imgsz (int): the size of the image that the model will be trained on. Defaults to 640
"""
return model_info(self, detailed=detailed, verbose=verbose, imgsz=imgsz)
def _apply(self, fn):
"""
Applies a function to all the tensors in the model that are not parameters or registered buffers.
Args:
fn (function): the function to apply to the model
Returns:
(BaseModel): An updated BaseModel object.
"""
self = super()._apply(fn)
m = self.model[-1] # Detect()
if isinstance(m, (
Detect, DetectAux,Detect_DyHead)):
m.stride = fn(m.stride)
m.anchors = fn(m.anchors)
m.strides = fn(m.strides)
return self
def load(self, weights, verbose=True):
"""
Load the weights into the model.
Args:
weights (dict | torch.nn.Module): The pre-trained weights to be loaded.
verbose (bool, optional): Whether to log the transfer progress. Defaults to True.
"""
model = weights['model'] if isinstance(weights, dict) else weights # torchvision models are not dicts
csd = model.float().state_dict() # checkpoint state_dict as FP32
csd = intersect_dicts(csd, self.state_dict()) # intersect
self.load_state_dict(csd, strict=False) # load
if verbose:
LOGGER.info(f'Transferred {len(csd)}/{len(self.model.state_dict())} items from pretrained weights')
def loss(self, batch, preds=None):
"""
Compute loss.
Args:
batch (dict): Batch to compute loss on
preds (torch.Tensor | List[torch.Tensor]): Predictions.
"""
if not hasattr(self, 'criterion'):
self.criterion = self.init_criterion()
preds = self.forward(batch['img']) if preds is None else preds
return self.criterion(preds, batch)
def init_criterion(self):
"""Initialize the loss criterion for the BaseModel."""
raise NotImplementedError('compute_loss() needs to be implemented by task heads')
class DetectionModel(BaseModel):
"""YOLOv8 detection model."""
def __init__(self, cfg='yolov8n.yaml', ch=3, nc=None, verbose=True): # model, input channels, number of classes
"""Initialize the YOLOv8 detection model with the given config and parameters."""
super().__init__()
self.yaml = cfg if isinstance(cfg, dict) else yaml_model_load(cfg) # cfg dict
# Warehouse_Manager
warehouse_manager_flag = self.yaml.get('Warehouse_Manager', False)
self.warehouse_manager = None
if warehouse_manager_flag:
self.warehouse_manager = Warehouse_Manager(cell_num_ratio=self.yaml.get('Warehouse_Manager_Ratio', 1.0))
# Define model
ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
if nc and nc != self.yaml['nc']:
LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
self.yaml['nc'] = nc # override YAML value
self.model, self.save = parse_model(deepcopy(self.yaml), ch=ch, verbose=verbose,
warehouse_manager=self.warehouse_manager) # model, savelist
self.names = {i: f'{i}' for i in range(self.yaml['nc'])} # default names dict
self.inplace = self.yaml.get('inplace', True)
if warehouse_manager_flag:
self.warehouse_manager.store()
self.warehouse_manager.allocate(self)
self.net_update_temperature(0)
# Build strides
m = self.model[-1] # Detect()
if isinstance(m, (
Detect, DetectAux, Segment, Pose,Detect_DyHead)):
s = 640 # 2x min stride
m.inplace = self.inplace
if isinstance(m, (DetectAux,)):
forward = lambda x: self.forward(x)[:3]
else:
forward = lambda x: self.forward(x)[0] if isinstance(m, (
Segment, Pose)) else self.forward(x)
try:
m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(2, ch, s, s))]) # forward
except RuntimeError as e:
if 'Not implemented on the CPU' in str(e):
self.model.to(torch.device('cuda'))
m.stride = torch.tensor([s / x.shape[-2] for x in
forward(torch.zeros(2, ch, s, s).to(torch.device('cuda')))]) # forward
else:
raise e
self.stride = m.stride
m.bias_init() # only run once
else:
self.stride = torch.Tensor([32]) # default stride for i.e. RTDETR
# Init weights, biases
initialize_weights(self)
if verbose:
self.info()
LOGGER.info('')
def _predict_augment(self, x):
"""Perform augmentations on input image x and return augmented inference and train outputs."""
img_size = x.shape[-2:] # height, width
s = [1, 0.83, 0.67] # scales
f = [None, 3, None] # flips (2-ud, 3-lr)
y = [] # outputs
for si, fi in zip(s, f):
xi = scale_img(x.flip(fi) if fi else x, si, gs=int(self.stride.max()))
yi = super().predict(xi)[0] # forward
yi = self._descale_pred(yi, fi, si, img_size)
y.append(yi)
y = self._clip_augmented(y) # clip augmented tails
return torch.cat(y, -1), None # augmented inference, train
@staticmethod
def _descale_pred(p, flips, scale, img_size, dim=1):
"""De-scale predictions following augmented inference (inverse operation)."""
p[:, :4] /= scale # de-scale
x, y, wh, cls = p.split((1, 1, 2, p.shape[dim] - 4), dim)
if flips == 2:
y = img_size[0] - y # de-flip ud
elif flips == 3:
x = img_size[1] - x # de-flip lr
return torch.cat((x, y, wh, cls), dim)
def _clip_augmented(self, y):
"""Clip YOLO augmented inference tails."""
nl = self.model[-1].nl # number of detection layers (P3-P5)
g = sum(4 ** x for x in range(nl)) # grid points
e = 1 # exclude layer count
i = (y[0].shape[-1] // g) * sum(4 ** x for x in range(e)) # indices
y[0] = y[0][..., :-i] # large
i = (y[-1].shape[-1] // g) * sum(4 ** (nl - 1 - x) for x in range(e)) # indices
y[-1] = y[-1][..., i:] # small
return y
def init_criterion(self):
"""Initialize the loss criterion for the DetectionModel."""
return v8DetectionLoss(self)
def net_update_temperature(self, temp):
for m in self.modules():
if hasattr(m, "update_temperature"):
m.update_temperature(temp)
class SegmentationModel(DetectionModel):
"""YOLOv8 segmentation model."""
def __init__(self, cfg='yolov8n-seg.yaml', ch=3, nc=None, verbose=True):
"""Initialize YOLOv8 segmentation model with given config and parameters."""
super().__init__(cfg=cfg, ch=ch, nc=nc, verbose=verbose)
def init_criterion(self):
"""Initialize the loss criterion for the SegmentationModel."""
return v8SegmentationLoss(self)
class PoseModel(DetectionModel):
"""YOLOv8 pose model."""
def __init__(self, cfg='yolov8n-pose.yaml', ch=3, nc=None, data_kpt_shape=(None, None), verbose=True):
"""Initialize YOLOv8 Pose model."""
if not isinstance(cfg, dict):
cfg = yaml_model_load(cfg) # load model YAML
if any(data_kpt_shape) and list(data_kpt_shape) != list(cfg['kpt_shape']):
LOGGER.info(f"Overriding model.yaml kpt_shape={cfg['kpt_shape']} with kpt_shape={data_kpt_shape}")
cfg['kpt_shape'] = data_kpt_shape
super().__init__(cfg=cfg, ch=ch, nc=nc, verbose=verbose)
def init_criterion(self):
"""Initialize the loss criterion for the PoseModel."""
return v8PoseLoss(self)
class ClassificationModel(BaseModel):
"""YOLOv8 classification model."""
def __init__(self, cfg='yolov8n-cls.yaml', ch=3, nc=None, verbose=True):
"""Init ClassificationModel with YAML, channels, number of classes, verbose flag."""
super().__init__()
self._from_yaml(cfg, ch, nc, verbose)
def _from_yaml(self, cfg, ch, nc, verbose):
"""Set YOLOv8 model configurations and define the model architecture."""
self.yaml = cfg if isinstance(cfg, dict) else yaml_model_load(cfg) # cfg dict
# Define model
ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels
if nc and nc != self.yaml['nc']:
LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
self.yaml['nc'] = nc # override YAML value
elif not nc and not self.yaml.get('nc', None):
raise ValueError('nc not specified. Must specify nc in model.yaml or function arguments.')
self.model, self.save = parse_model(deepcopy(self.yaml), ch=ch, verbose=verbose) # model, savelist
self.stride = torch.Tensor([1]) # no stride constraints
self.names = {i: f'{i}' for i in range(self.yaml['nc'])} # default names dict
self.info()
@staticmethod
def reshape_outputs(model, nc):
"""Update a TorchVision classification model to class count 'n' if required."""
name, m = list((model.model if hasattr(model, 'model') else model).named_children())[-1] # last module
if isinstance(m, Classify): # YOLO Classify() head
if m.linear.out_features != nc:
m.linear = nn.Linear(m.linear.in_features, nc)
elif isinstance(m, nn.Linear): # ResNet, EfficientNet
if m.out_features != nc:
setattr(model, name, nn.Linear(m.in_features, nc))
elif isinstance(m, nn.Sequential):
types = [type(x) for x in m]
if nn.Linear in types:
i = types.index(nn.Linear) # nn.Linear index
if m[i].out_features != nc:
m[i] = nn.Linear(m[i].in_features, nc)
elif nn.Conv2d in types:
i = types.index(nn.Conv2d) # nn.Conv2d index
if m[i].out_channels != nc:
m[i] = nn.Conv2d(m[i].in_channels, nc, m[i].kernel_size, m[i].stride, bias=m[i].bias is not None)
def init_criterion(self):
"""Initialize the loss criterion for the ClassificationModel."""
return v8ClassificationLoss()
class RTDETRDetectionModel(DetectionModel):
"""
RTDETR (Real-time DEtection and Tracking using Transformers) Detection Model class.
This class is responsible for constructing the RTDETR architecture, defining loss functions, and facilitating both
the training and inference processes. RTDETR is an object detection and tracking model that extends from the
DetectionModel base class.
Attributes:
cfg (str): The configuration file path or preset string. Default is 'rtdetr-l.yaml'.
ch (int): Number of input channels. Default is 3 (RGB).
nc (int, optional): Number of classes for object detection. Default is None.
verbose (bool): Specifies if summary statistics are shown during initialization. Default is True.
Methods:
init_criterion: Initializes the criterion used for loss calculation.
loss: Computes and returns the loss during training.
predict: Performs a forward pass through the network and returns the output.
"""
def __init__(self, cfg='rtdetr-l.yaml', ch=3, nc=None, verbose=True):
"""
Initialize the RTDETRDetectionModel.
Args:
cfg (str): Configuration file name or path.
ch (int): Number of input channels.
nc (int, optional): Number of classes. Defaults to None.
verbose (bool, optional): Print additional information during initialization. Defaults to True.
"""
super().__init__(cfg=cfg, ch=ch, nc=nc, verbose=verbose)
def init_criterion(self):
"""Initialize the loss criterion for the RTDETRDetectionModel."""
from ultralytics.models.utils.loss import RTDETRDetectionLoss
return RTDETRDetectionLoss(nc=self.nc, use_vfl=True)
def loss(self, batch, preds=None):
"""
Compute the loss for the given batch of data.
Args:
batch (dict): Dictionary containing image and label data.
preds (torch.Tensor, optional): Precomputed model predictions. Defaults to None.
Returns:
(tuple): A tuple containing the total loss and main three losses in a tensor.
"""
if not hasattr(self, 'criterion'):
self.criterion = self.init_criterion()
img = batch['img']
# NOTE: preprocess gt_bbox and gt_labels to list.
bs = len(img)
batch_idx = batch['batch_idx']
gt_groups = [(batch_idx == i).sum().item() for i in range(bs)]
targets = {
'cls': batch['cls'].to(img.device, dtype=torch.long).view(-1),
'bboxes': batch['bboxes'].to(device=img.device),
'batch_idx': batch_idx.to(img.device, dtype=torch.long).view(-1),
'gt_groups': gt_groups}
preds = self.predict(img, batch=targets) if preds is None else preds
dec_bboxes, dec_scores, enc_bboxes, enc_scores, dn_meta = preds if self.training else preds[1]
if dn_meta is None:
dn_bboxes, dn_scores = None, None
else:
dn_bboxes, dec_bboxes = torch.split(dec_bboxes, dn_meta['dn_num_split'], dim=2)
dn_scores, dec_scores = torch.split(dec_scores, dn_meta['dn_num_split'], dim=2)
dec_bboxes = torch.cat([enc_bboxes.unsqueeze(0), dec_bboxes]) # (7, bs, 300, 4)
dec_scores = torch.cat([enc_scores.unsqueeze(0), dec_scores])
loss = self.criterion((dec_bboxes, dec_scores),
targets,
dn_bboxes=dn_bboxes,
dn_scores=dn_scores,
dn_meta=dn_meta)
# NOTE: There are like 12 losses in RTDETR, backward with all losses but only show the main three losses.
return sum(loss.values()), torch.as_tensor([loss[k].detach() for k in ['loss_giou', 'loss_class', 'loss_bbox']],
device=img.device)
def predict(self, x, profile=False, visualize=False, batch=None, augment=False):
"""
Perform a forward pass through the model.
Args:
x (torch.Tensor): The input tensor.
profile (bool, optional): If True, profile the computation time for each layer. Defaults to False.
visualize (bool, optional): If True, save feature maps for visualization. Defaults to False.
batch (dict, optional): Ground truth data for evaluation. Defaults to None.
augment (bool, optional): If True, perform data augmentation during inference. Defaults to False.
Returns:
(torch.Tensor): Model's output tensor.
"""
y, dt = [], [] # outputs
for m in self.model[:-1]: # except the head part
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
if visualize:
feature_visualization(x, m.type, m.i, save_dir=visualize)
head = self.model[-1]
x = head([y[j] for j in head.f], batch) # head inference
return x
class Ensemble(nn.ModuleList):
"""Ensemble of models."""
def __init__(self):
"""Initialize an ensemble of models."""
super().__init__()
def forward(self, x, augment=False, profile=False, visualize=False):
"""Function generates the YOLO network's final layer."""
y = [module(x, augment, profile, visualize)[0] for module in self]
# y = torch.stack(y).max(0)[0] # max ensemble
# y = torch.stack(y).mean(0) # mean ensemble
y = torch.cat(y, 2) # nms ensemble, y shape(B, HW, C)
return y, None # inference, train output
# Functions ------------------------------------------------------------------------------------------------------------
@contextlib.contextmanager
def temporary_modules(modules=None):
"""
Context manager for temporarily adding or modifying modules in Python's module cache (`sys.modules`).
This function can be used to change the module paths during runtime. It's useful when refactoring code,
where you've moved a module from one location to another, but you still want to support the old import
paths for backwards compatibility.
Args:
modules (dict, optional): A dictionary mapping old module paths to new module paths.
Example:
```python
with temporary_modules({'old.module.path': 'new.module.path'}):
import old.module.path # this will now import new.module.path
```
Note:
The changes are only in effect inside the context manager and are undone once the context manager exits.
Be aware that directly manipulating `sys.modules` can lead to unpredictable results, especially in larger
applications or libraries. Use this function with caution.
"""
if not modules:
modules = {}
import importlib
import sys
try:
# Set modules in sys.modules under their old name
for old, new in modules.items():
sys.modules[old] = importlib.import_module(new)
yield
finally:
# Remove the temporary module paths
for old in modules:
if old in sys.modules:
del sys.modules[old]
def torch_safe_load(weight):
"""
This function attempts to load a PyTorch model with the torch.load() function. If a ModuleNotFoundError is raised,
it catches the error, logs a warning message, and attempts to install the missing module via the
check_requirements() function. After installation, the function again attempts to load the model using torch.load().
Args:
weight (str): The file path of the PyTorch model.
Returns:
(dict): The loaded PyTorch model.
"""
from ultralytics.utils.downloads import attempt_download_asset
check_suffix(file=weight, suffix='.pt')
file = attempt_download_asset(weight) # search online if missing locally
try:
with temporary_modules({
'ultralytics.yolo.utils': 'ultralytics.utils',
'ultralytics.yolo.v8': 'ultralytics.models.yolo',
'ultralytics.yolo.data': 'ultralytics.data'}): # for legacy 8.0 Classify and Pose models
return torch.load(file, map_location='cpu'), file # load
except ModuleNotFoundError as e: # e.name is missing module name
if e.name == 'models':
raise TypeError(
emojis(f'ERROR ?? {weight} appears to be an Ultralytics YOLOv5 model originally trained '
f'with https://github.com/ultralytics/yolov5.\nThis model is NOT forwards compatible with '
f'YOLOv8 at https://github.com/ultralytics/ultralytics.'
f"\nRecommend fixes are to train a new model using the latest 'ultralytics' package or to "
f"run a command with an official YOLOv8 model, i.e. 'yolo predict model=yolov8n.pt'")) from e
LOGGER.warning(f"WARNING ?? {weight} appears to require '{e.name}', which is not in ultralytics requirements."
f"\nAutoInstall will run now for '{e.name}' but this feature will be removed in the future."
f"\nRecommend fixes are to train a new model using the latest 'ultralytics' package or to "
f"run a command with an official YOLOv8 model, i.e. 'yolo predict model=yolov8n.pt'")
check_requirements(e.name) # install missing module
return torch.load(file, map_location='cpu'), file # load
def attempt_load_weights(weights, device=None, inplace=True, fuse=False):
"""Loads an ensemble of models weights=[a,b,c] or a single model weights=[a] or weights=a."""
ensemble = Ensemble()
for w in weights if isinstance(weights, list) else [weights]:
ckpt, w = torch_safe_load(w) # load ckpt
args = {**DEFAULT_CFG_DICT, **ckpt['train_args']} if 'train_args' in ckpt else None # combined args
model = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
# Model compatibility updates
model.args = args # attach args to model
model.pt_path = w # attach *.pt file path to model
model.task = guess_model_task(model)
if not hasattr(model, 'stride'):
model.stride = torch.tensor([32.])
# Append
ensemble.append(model.fuse().eval() if fuse and hasattr(model, 'fuse') else model.eval()) # model in eval mode
# Module updates
for m in ensemble.modules():
t = type(m)
if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Segment,DetectAux,Detect_DyHead):
m.inplace = inplace
elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
m.recompute_scale_factor = None # torch 1.11.0 compatibility
# Return model
if len(ensemble) == 1:
return ensemble[-1]
# Return ensemble
LOGGER.info(f'Ensemble created with {weights}\n')
for k in 'names', 'nc', 'yaml':
setattr(ensemble, k, getattr(ensemble[0], k))
ensemble.stride = ensemble[torch.argmax(torch.tensor([m.stride.max() for m in ensemble])).int()].stride
assert all(ensemble[0].nc == m.nc for m in ensemble), f'Models differ in class counts {[m.nc for m in ensemble]}'
return ensemble
def attempt_load_one_weight(weight, device=None, inplace=True, fuse=False):
"""Loads a single model weights."""
ckpt, weight = torch_safe_load(weight) # load ckpt
args = {**DEFAULT_CFG_DICT, **(ckpt.get('train_args', {}))} # combine model and default args, preferring model args
model = (ckpt.get('ema') or ckpt['model']).to(device).float() # FP32 model
# Model compatibility updates
model.args = {k: v for k, v in args.items() if k in DEFAULT_CFG_KEYS} # attach args to model
model.pt_path = weight # attach *.pt file path to model
model.task = guess_model_task(model)
if not hasattr(model, 'stride'):
model.stride = torch.tensor([32.])
model = model.fuse().eval() if fuse and hasattr(model, 'fuse') else model.eval() # model in eval mode
# Module updates
for m in model.modules():
t = type(m)
if t in (nn.Hardswish, nn.LeakyReLU, nn.ReLU, nn.ReLU6, nn.SiLU, Detect, Segment,DetectAux,Detect_DyHead):
m.inplace = inplace
elif t is nn.Upsample and not hasattr(m, 'recompute_scale_factor'):
m.recompute_scale_factor = None # torch 1.11.0 compatibility
# Return model and ckpt
return model, ckpt
def parse_model(d, ch, verbose=True, warehouse_manager=None): # model_dict, input_channels(3)
"""Parse a YOLO model.yaml dictionary into a PyTorch model."""
import ast
# Args
max_channels = float('inf')
nc, act, scales = (d.get(x) for x in ('nc', 'activation', 'scales'))
depth, width, kpt_shape = (d.get(x, 1.0) for x in ('depth_multiple', 'width_multiple', 'kpt_shape'))
if scales:
scale = d.get('scale')
if not scale:
scale = tuple(scales.keys())[0]
LOGGER.warning(f"WARNING ?? no model scale passed. Assuming scale='{scale}'.")
depth, width, max_channels = scales[scale]
if act:
Conv.default_act = eval(act) # redefine default activation, i.e. Conv.default_act = nn.SiLU()
if verbose:
LOGGER.info(f"{colorstr('activation:')} {act}") # print
if verbose:
LOGGER.info(f"\n{'':>3}{'from':>20}{'n':>3}{'params':>10} {'module':<45}{'arguments':<30}")
ch = [ch]
layers, save, c2 = [], [], ch[-1] # layers, savelist, ch out
is_backbone = False
for i, (f, n, m, args) in enumerate(d['backbone'] + d['head']): # from, number, module, args
try:
if m == 'node_mode':
m = d[m]
if len(args) > 0:
if args[0] == 'head_channel':
args[0] = int(d[args[0]])
t = m
m = getattr(torch.nn, m[3:]) if 'nn.' in m else globals()[m] # get module
except:
pass
for j, a in enumerate(args):
if isinstance(a, str):
with contextlib.suppress(ValueError):
try:
args[j] = locals()[a] if a in locals() else ast.literal_eval(a)
except:
args[j] = a
n = n_ = max(round(n * depth), 1) if n > 1 else n # depth gain
if m in (Classify, Conv, ConvTranspose, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, Focus,
BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, nn.ConvTranspose2d, DWConvTranspose2d, C3x, RepC3,
C2f_EMSC, C2f_EMSCP):
if args[0] == 'head_channel':
args[0] = d[args[0]]
c1, c2 = ch[f], args[0]
if c2 != nc: # if c2 not equal to number of classes (i.e. for Classify() output)
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, c2, *args[1:]]
if m in (
BottleneckCSP, C1, C2, C2f, C3, C3TR, C3Ghost, C3x, RepC3, C2f_EMSC, C2f_EMSCP):
args.insert(2, n) # number of repeats
n = 1
elif m is AIFI:
args = [ch[f], *args]
elif m in (HGStem, HGBlock):
c1, cm, c2 = ch[f], args[0], args[1]
args = [c1, cm, c2, *args[2:]]
if m is HGBlock:
args.insert(4, n) # number of repeats
n = 1
elif m in (
Detect, DetectAux, Pose,Detect_DyHead):
args.append([ch[x] for x in f])
elif m is nn.BatchNorm2d:
args = [ch[f]]
elif m is Concat:
c2 = sum(ch[x] for x in f)
elif m in (Detect, Segment, Pose):
args.append([ch[x] for x in f])
if m is Segment:
args[2] = make_divisible(min(args[2], max_channels) * width, 8)
elif m is RTDETRDecoder: # special case, channels arg must be passed in index 1
args.insert(1, [ch[x] for x in f])
else:
c2 = ch[f]
if isinstance(c2, list):
is_backbone = True
m_ = m
m_.backbone = True
else:
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
t = str(m)[8:-2].replace('__main__.', '') # module type
m.np = sum(x.numel() for x in m_.parameters()) # number params
m_.i, m_.f, m_.type = i + 4 if is_backbone else i, f, t # attach index, 'from' index, type
if verbose:
LOGGER.info(f'{i:>3}{str(f):>20}{n_:>3}{m.np:10.0f} {t:<45}{str(args):<30}') # print
save.extend(x % (i + 4 if is_backbone else i) for x in ([f] if isinstance(f, int) else f) if
x != -1) # append to savelist
layers.append(m_)
if i == 0:
ch = []
if isinstance(c2, list):
ch.extend(c2)
for _ in range(5 - len(ch)):
ch.insert(0, 0)
else:
ch.append(c2)
return nn.Sequential(*layers), sorted(save)
def yaml_model_load(path):
"""Load a YOLOv8 model from a YAML file."""
import re
path = Path(path)
if path.stem in (f'yolov{d}{x}6' for x in 'nsmlx' for d in (5, 8)):
new_stem = re.sub(r'(\d+)([nslmx])6(.+)?$', r'\1\2-p6\3', path.stem)
LOGGER.warning(f'WARNING ?? Ultralytics YOLO P6 models now use -p6 suffix. Renaming {path.stem} to {new_stem}.')
path = path.with_name(new_stem + path.suffix)
unified_path = re.sub(r'(\d+)([nslmx])(.+)?$', r'\1\3', str(path)) # i.e. yolov8x.yaml -> yolov8.yaml
yaml_file = check_yaml(unified_path, hard=False) or check_yaml(path)
d = yaml_load(yaml_file) # model dict
d['scale'] = guess_model_scale(path)
d['yaml_file'] = str(path)
return d
def guess_model_scale(model_path):
"""
Takes a path to a YOLO model's YAML file as input and extracts the size character of the model's scale. The function
uses regular expression matching to find the pattern of the model scale in the YAML file name, which is denoted by
n, s, m, l, or x. The function returns the size character of the model scale as a string.
Args:
model_path (str | Path): The path to the YOLO model's YAML file.
Returns:
(str): The size character of the model's scale, which can be n, s, m, l, or x.
"""
with contextlib.suppress(AttributeError):
import re
return re.search(r'yolov\d+([nslmx])', Path(model_path).stem).group(1) # n, s, m, l, or x
return ''
def guess_model_task(model):
"""
Guess the task of a PyTorch model from its architecture or configuration.
Args:
model (nn.Module | dict): PyTorch model or model configuration in YAML format.
Returns:
(str): Task of the model ('detect', 'segment', 'classify', 'pose').
Raises:
SyntaxError: If the task of the model could not be determined.
"""
def cfg2task(cfg):
"""Guess from YAML dictionary."""
m = cfg['head'][-1][-2].lower() # output module name
if m in ('classify', 'classifier', 'cls', 'fc'):
return 'classify'
if 'detect' in m:
return 'detect'
if 'segment' in m:
return 'segment'
if 'pose' in m:
return 'pose'
# Guess from model cfg
if isinstance(model, dict):
with contextlib.suppress(Exception):
return cfg2task(model)
# Guess from PyTorch model
if isinstance(model, nn.Module): # PyTorch model
for x in 'model.args', 'model.model.args', 'model.model.model.args':
with contextlib.suppress(Exception):
return eval(x)['task']
for x in 'model.yaml', 'model.model.yaml', 'model.model.model.yaml':
with contextlib.suppress(Exception):
return cfg2task(eval(x))
for m in model.modules():
if isinstance(m, (Detect, DetectAux,Detect_DyHead)):
return 'detect'
elif isinstance(m, (Segment)):
return 'segment'
elif isinstance(m, Classify):
return 'classify'
elif isinstance(m, Pose):
return 'pose'
# Guess from model filename
if isinstance(model, (str, Path)):
model = Path(model)
if '-seg' in model.stem or 'segment' in model.parts:
return 'segment'
elif '-cls' in model.stem or 'classify' in model.parts:
return 'classify'
elif '-pose' in model.stem or 'pose' in model.parts:
return 'pose'
elif 'detect' in model.parts:
return 'detect'
# Unable to determine task from model
LOGGER.warning("WARNING ?? Unable to automatically guess model task, assuming 'task=detect'. "
"Explicitly define task for your model, i.e. 'task=detect', 'segment', 'classify', or 'pose'.")
return 'detect' # assume detect
3、创建yolov8+dyhead+c2fEMSC和yolov8+dyhead+c2fEMSCP的yaml文件?
两种改进方法的结合最重要一点的是最终训练的yaml文件:
yolov8+dyhead+c2fEMSC:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 2 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f_EMSC, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f_EMSC, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f_EMSC, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f_EMSC, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f_EMSC, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect_DyHead, [nc, 128, 1]] # Detect(P3, P4, P5)
yolov8+dyhead+c2fEMSCP:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 2 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f_EMSCP, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f_EMSCP, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f_EMSCP, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f_EMSCP, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f_EMSCP, [1024]] # 21 (P5/32-large)
- [[15, 18, 21], 1, Detect_DyHead, [nc, 128, 1]] # Detect(P3, P4, P5)
三、运行测试
yolov8+dyhead+c2fEMSC:

yolov8+dyhead+c2fEMSCP:
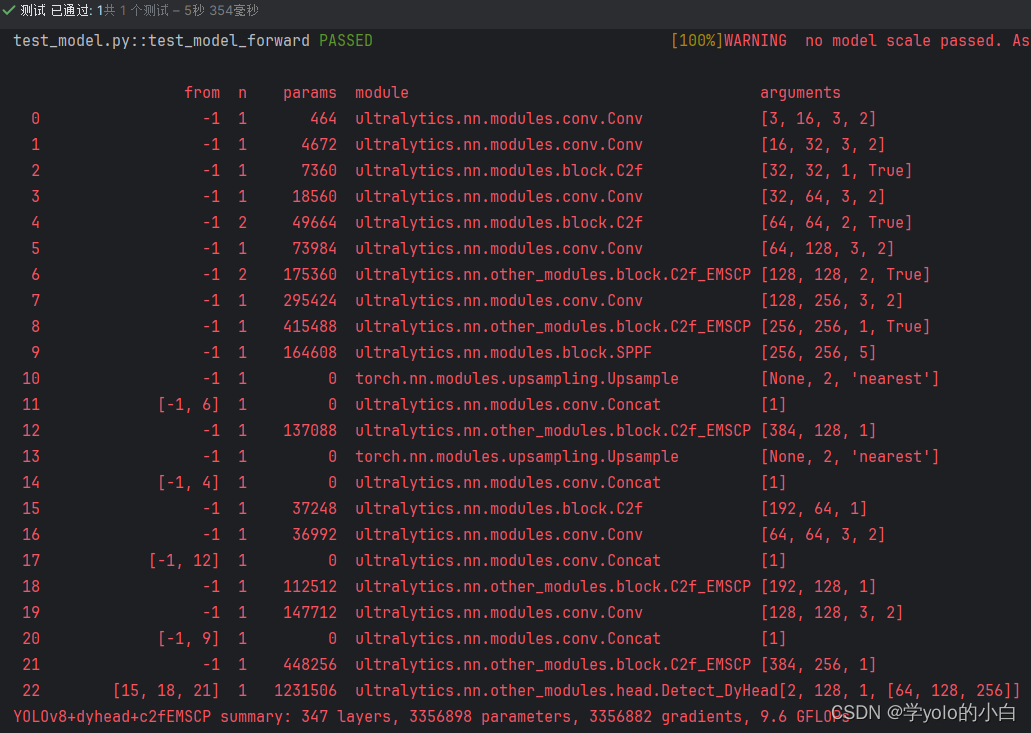
可以看出最终模型中已经同时包含了Detect_DyHead检测头和C2f-EMSC或者C2f-EMSCP模块。
文章来源:https://blog.csdn.net/zmyzcm/article/details/135373844
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:veading@qq.com进行投诉反馈,一经查实,立即删除!